
#include <pcl/features/normal_3d.h>
#include <pcl/features/ppf.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/io/pcd_io.h>
#include <pcl/registration/ppf_registration.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <thread>
#include <pcl/registration/icp.h>
using namespace pcl;
using namespace std::chrono_literals;
const Eigen::Vector4f subsampling_leaf_size(1.5f,1.5f, 1.5f, 0.0f);//下采样立方体大小
constexpr float normal_estimation_search_radius = 5.0f;//法线计算搜索半径
int
main(int argc, char** argv)
{
/// 读取点云文件
PointCloud<PointXYZ>::Ptr cloud_scene(new PointCloud<PointXYZ>());
if (pcl::io::loadPCDFile("screws_M8_40_ronghe.pcd", *cloud_scene) < 0)
{
std::cout << "Error loading scene cloud." << std::endl;
return (-1);
}
else
{
cout << "cloud_scene 读取成功" << endl;
}
PointCloud<PointXYZ>::Ptr cloud_model(new PointCloud<PointXYZ>());
if (pcl::io::loadPCDFile("screws_M8_40.pcd", *cloud_model) < 0)
{
std::cout << "Error loading model cloud." << std::endl;
return (-1);
}
else
{
cout << "cloud_model 读取成功" << endl;
}
//背景部分处理
PointCloud<PointNormal>::Ptr cloud_scene_input(new PointCloud<PointNormal>());
PointCloud<PointXYZ>::Ptr cloud_scene_subsampled(new PointCloud<PointXYZ>());
//下采样滤波
VoxelGrid<PointXYZ> subsampling_filter;
subsampling_filter.setInputCloud(cloud_scene);
subsampling_filter.setLeafSize(subsampling_leaf_size);
subsampling_filter.filter(*cloud_scene_subsampled);
//计算背景法线
PointCloud<Normal>::Ptr cloud_scene_normals(new PointCloud<Normal>());
NormalEstimation<PointXYZ, Normal> normal_estimation_filter;
normal_estimation_filter.setInputCloud(cloud_scene_subsampled);
search::KdTree<PointXYZ>::Ptr search_tree(new search::KdTree<PointXYZ>);
normal_estimation_filter.setSearchMethod(search_tree);
normal_estimation_filter.setRadiusSearch(normal_estimation_search_radius);
normal_estimation_filter.compute(*cloud_scene_normals);
pcl::concatenateFields(*cloud_scene_subsampled, *cloud_scene_normals, *cloud_scene_input);
cout << cloud_scene->size() << " down to" << cloud_scene_subsampled->size() << endl;
//模型部分处理
PointCloud<PointNormal>::Ptr cloud_model_input(new PointCloud<PointNormal>());
PointCloud<PointXYZ>::Ptr cloud_model_subsampled(new PointCloud<PointXYZ>());
//下采样滤波
VoxelGrid<PointXYZ> subsampling_filter2;
subsampling_filter2.setInputCloud(cloud_model);
subsampling_filter2.setLeafSize(subsampling_leaf_size);
subsampling_filter2.filter(*cloud_model_subsampled);
//计算背景法线
PointCloud<Normal>::Ptr cloud_model_normals(new PointCloud<Normal>());
NormalEstimation<PointXYZ, Normal> normal_estimation_filter2;
normal_estimation_filter2.setInputCloud(cloud_model_subsampled);
search::KdTree<PointXYZ>::Ptr search_tree2(new search::KdTree<PointXYZ>);
normal_estimation_filter2.setSearchMethod(search_tree2);
normal_estimation_filter2.setRadiusSearch(normal_estimation_search_radius);
normal_estimation_filter2.compute(*cloud_model_normals);
pcl::concatenateFields(*cloud_model_subsampled, *cloud_model_normals, *cloud_model_input);
cout << cloud_model->size() << " down to" << cloud_model_subsampled->size() << endl;
// pcl::PointCloud<pcl::PPFSignature>::Ptr cloud_model_ppf = pcl::PointCloud<pcl::PPFSignature>::Ptr(new pcl::PointCloud<pcl::PPFSignature>());
PointCloud<PPFSignature>::Ptr cloud_model_ppf(new PointCloud<PPFSignature>());
PPFEstimation<PointNormal, PointNormal, PPFSignature> ppf_estimator;
ppf_estimator.setInputCloud(cloud_model_input);
ppf_estimator.setInputNormals(cloud_model_input);
ppf_estimator.compute(*cloud_model_ppf);//之前一直出现指针报错???,加多维向量AGX后解决
PPFHashMapSearch::Ptr hashmap_search(new PPFHashMapSearch( 2 * float(M_PI)/20 ,0.1f));
hashmap_search->setInputFeatureCloud(cloud_model_ppf);
visualization::PCLVisualizer viewer("PPF Object Recognition - Results");
viewer.setBackgroundColor(0, 0, 0);
viewer.addPointCloud(cloud_scene);
viewer.spinOnce(10);
PCL_INFO("Registering models to scene ...\n");
将源点云和目标点云都转化为无序点云
//cloud_model_input->height = 1;
//cloud_model_input->is_dense = false;
//cloud_scene_input->height = 1;
//cloud_scene_input->is_dense = false;
PPFRegistration<PointNormal, PointNormal> ppf_registration;
// set parameters for the PPF registration procedure
ppf_registration.setSceneReferencePointSamplingRate(10);
ppf_registration.setPositionClusteringThreshold(2.0f);
ppf_registration.setRotationClusteringThreshold(12.0f / 180.0f * float(M_PI));
ppf_registration.setSearchMethod(hashmap_search);
ppf_registration.setInputSource(cloud_model_input);
ppf_registration.setInputTarget(cloud_scene_input);
无序点云
PointCloud<PointNormal>::Ptr cloud_output_subsampled(new PointCloud<PointNormal>());
ppf_registration.align(*cloud_output_subsampled);
//出现数组越界访问,无序点云OR有序点云, //有疑问的地方?????????????????????????????
//修改ppf_registration.hpp中的const auto aux_size = static_cast<std::size_t>(
// std::floor(2 * M_PI / search_method_->getAngleDiscretizationStep() + 1));
//转换点云XYZ格式
PointCloud<PointXYZ>::Ptr cloud_output_subsampled_xyz(new PointCloud<PointXYZ>());
for (const auto& point : (* cloud_output_subsampled).points)
cloud_output_subsampled_xyz->points.emplace_back(point.x, point.y, point.z);
Eigen::Matrix4f mat = ppf_registration.getFinalTransformation();
std::cout << "PPF 变换矩阵:" << endl<<mat << endl;
std::cout << "PPF score:" << ppf_registration.getFitnessScore() << endl;
Eigen::Affine3f final_transformation(mat);
//进行精确配准,采用ICP算法
PointCloud<PointXYZ>::Ptr icp_result(new PointCloud<PointXYZ>());
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
//输入待配准点云和目标点云
icp.setInputSource(cloud_model_subsampled);
icp.setInputTarget(cloud_output_subsampled_xyz);
//Set the max correspondence distance to 4cm (e.g., correspondences with higher distances will be ignored)
icp.setMaxCorrespondenceDistance(10);//默认单位是米?
//最大迭代次数
icp.setMaximumIterations(1000);
//两次变化矩阵之间的差值
icp.setTransformationEpsilon(1e-10);
// 均方误差
icp.setEuclideanFitnessEpsilon(0.002);
icp.align(*icp_result, mat);
Eigen::Matrix4f icp_trans;
icp_trans = icp.getFinalTransformation();
std::cout << "icp变换矩阵:" << endl<<icp_trans << endl;
std::cout << "icp score:" << icp.getFitnessScore() << endl;
PointCloud<PointXYZ>::Ptr cloud_output(new PointCloud<PointXYZ>());
pcl::transformPointCloud(
*cloud_model, *cloud_output, icp_trans);
pcl::visualization::PointCloudColorHandlerCustom<PointXYZ> output(cloud_output_subsampled_xyz, 255, 0, 0);
pcl::visualization::PointCloudColorHandlerRandom<PointXYZ> random_color(cloud_output->makeShared());
viewer.addPointCloud(cloud_output, random_color, "mode_name");
//viewer.addPointCloud(cloud_output_subsampled_xyz, output, "dsd");
while (!viewer.wasStopped()) {
viewer.spinOnce(100);
std::this_thread::sleep_for(100ms);
}
return 0;
}
在使用过程中踩到的坑:
(1):PointCloud<PPFSignature>::Ptr cloud_model_ppf(new PointCloud<PPFSignature>());
PPFEstimation<PointNormal, PointNormal, PPFSignature> ppf_estimator;
ppf_estimator.setInputCloud(cloud_model_input);
ppf_estimator.setInputNormals(cloud_model_input);
ppf_estimator.compute(*cloud_model_ppf);
运行到ppf_estimator.compute(*cloud_model_ppf);一直报错,是指针问题,打开属性面板,选择高级矢量扩展即可

(2)ppf_registration.align(*cloud_output_subsampled);运行到这里时一致报错,弹出警告是vector越界访问。解决办法:
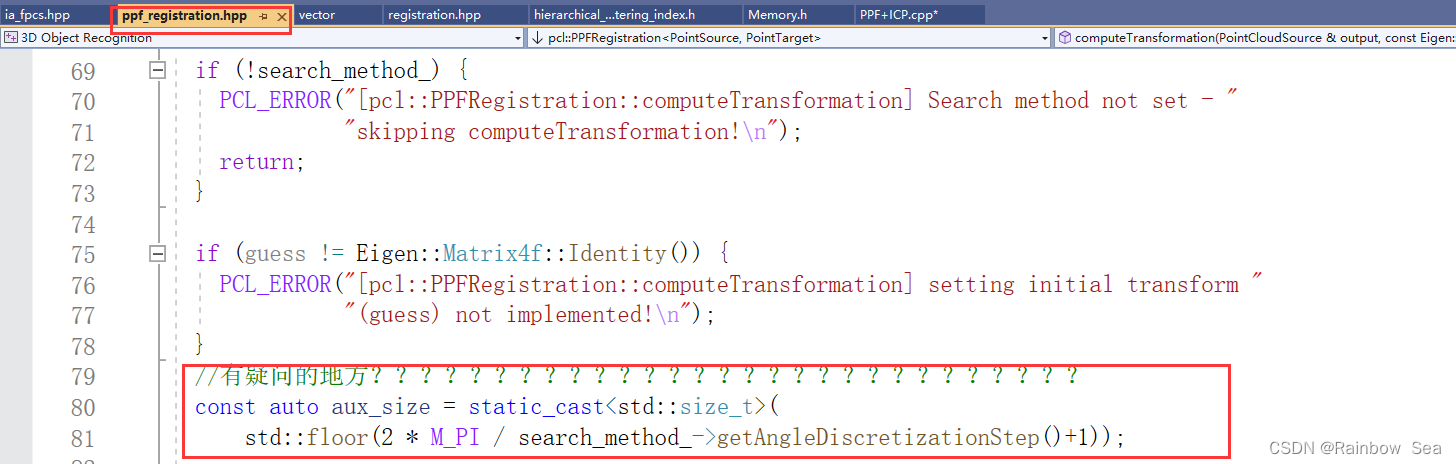
修改这个库文件,在floor函数后加一即可解决,问题出在floor函数向下取整,aux_size应该等于20,floor括号中算出来的是19.999.。。。,向下取整就变成19了,所以会出现越界访问!!
附上最后运行效果:

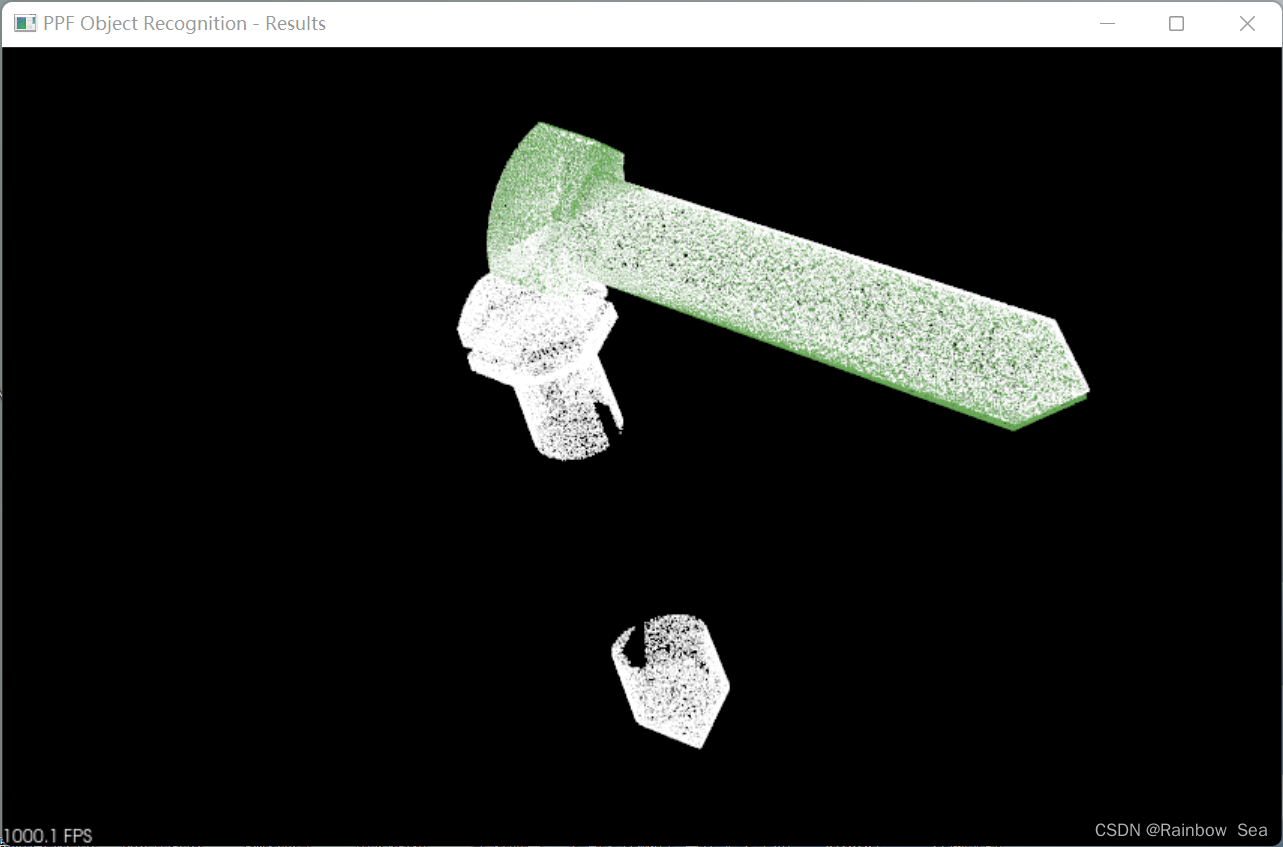
绿色点云是找到的目标,加ICP是为了使位姿更准确
本文转载自: https://blog.csdn.net/qq_46463876/article/details/129298349
版权归原作者 Rainbow Sea 所有, 如有侵权,请联系我们删除。
版权归原作者 Rainbow Sea 所有, 如有侵权,请联系我们删除。