
《一文搞懂IoU发展历程》GIoU、DIoU、CIoU、EIoU、αIoU、SIoU
文章目录
IoU出现背景
目标检测任务的损失函数一般由
Classificition Loss
(分类损失函数)和
Bounding Box Regeression Loss
(回归损失函数)两部分构成。因此,更好的定位有利于模型精度的提高。在
IoU Loss
提出来之前,检测上有关候选框的回归主要是通过坐标的回归损失来优化。但
L1 Loss
和
L2 Loss
存在比较大的问题:
- L1 Loss的问题:损失函数对x的导数为常数,在训练后期,x很小时,如果learning rate 不变,损失函数会在稳定值附近波动,很难收敛到更高的精度。
- L2 Loss的问题:损失函数对x的导数在x值很大时,其导数也非常大,在训练初期不稳定。
而且,基于
L1/L2 Loss
的坐标回归不具有尺度不变性,且并没有将四个坐标之间的相关性考虑进去。因此,像
L1/L2 Loss
直接的坐标回归实际上很难描述两框之间的相对位置关系。
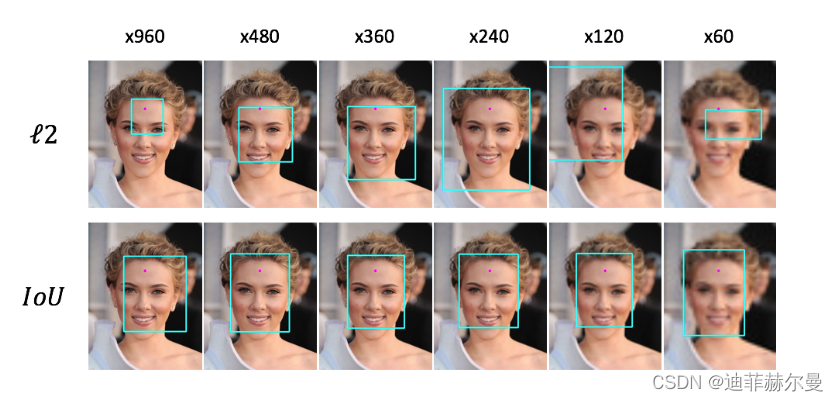
因此,在ACM2016的论文中提出了
IoU loss
,它将四个坐标点看成一个整体进行计算,具有尺度不变性(也就是对尺度不敏感)。
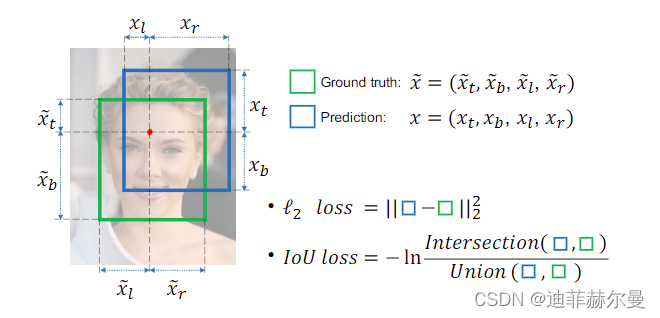
IoU Loss
的定义是先求出预测框和真实框之间的交集和并集之比,再求负对数,但是在实际使用中我们常常将
IoU Loss
写成
1-IoU
。如果两个框重合则交并比等于
1
,
Loss
为0说明重合度非常高。因此,
IoU
的取值范围为
[0,1]
。
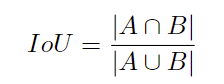
什么是IoU?
IOU
的全称为交并比(Intersection over Union),是目标检测中使用的一个概念,
IoU
计算的是“预测的边框”和“真实的边框”的交叠率,即它们的交集和并集的比值。最理想情况是完全重叠,即比值为1。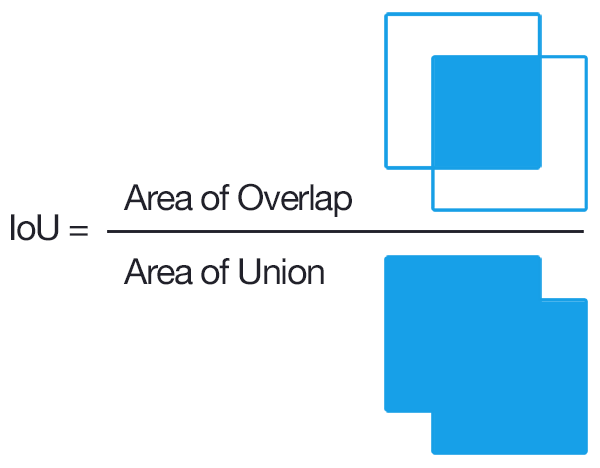
IoU发展历程
虽然
IoU Loss
虽然解决了
Smooth L1
系列变量相互独立和不具有尺度不变性的两大问题,但是它也存在两个问题:
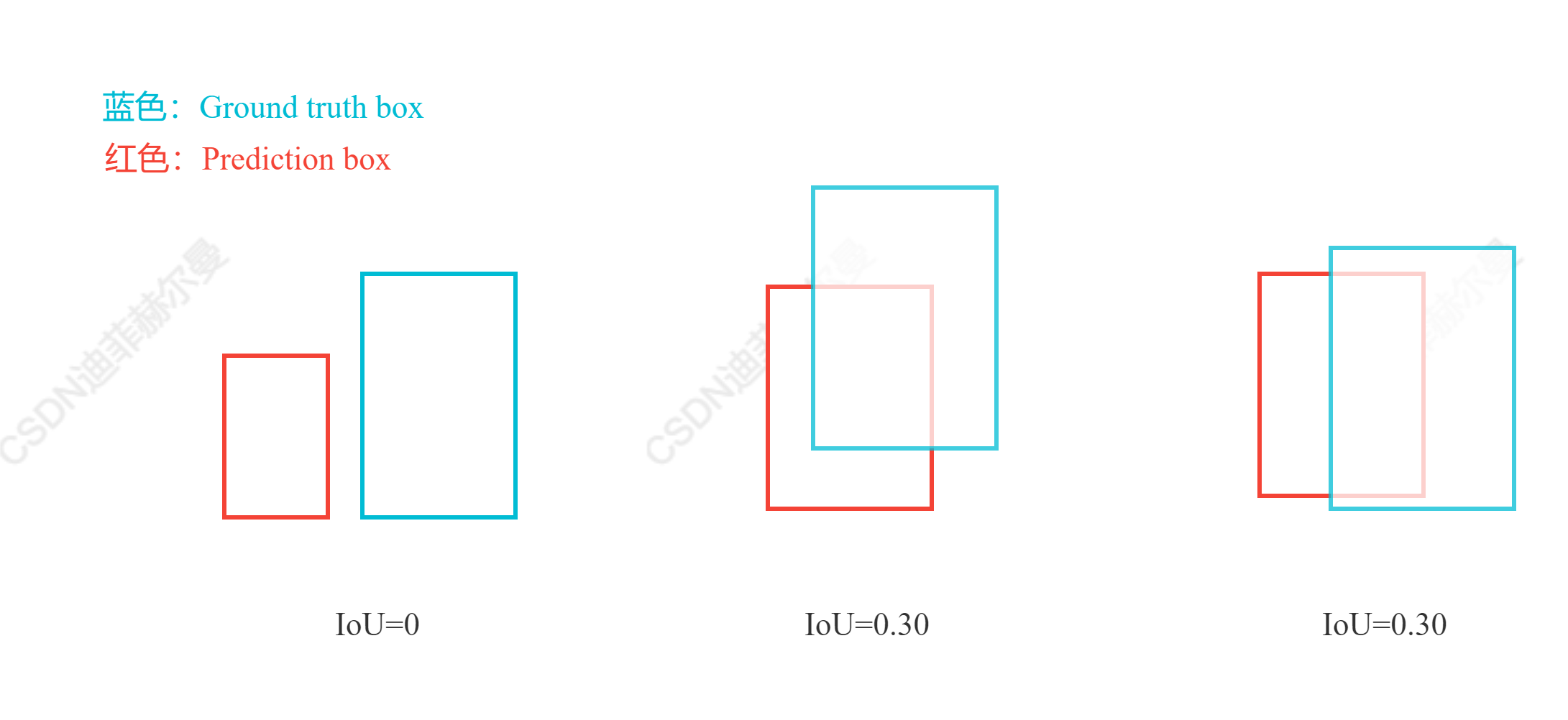
- 当预测框和目标框不相交时,即
IoU(A,B)=0时,不能反映A,B距离的远近,此时损失函数不可导,IoU Loss无法优化两个框不相交的情况。 - 如上图三个框,假设预测框和目标框的大小都确定,只要两个框的相交值是确定的,即其
IoU值相同时,IoU值不能反映两个框是如何相交的。
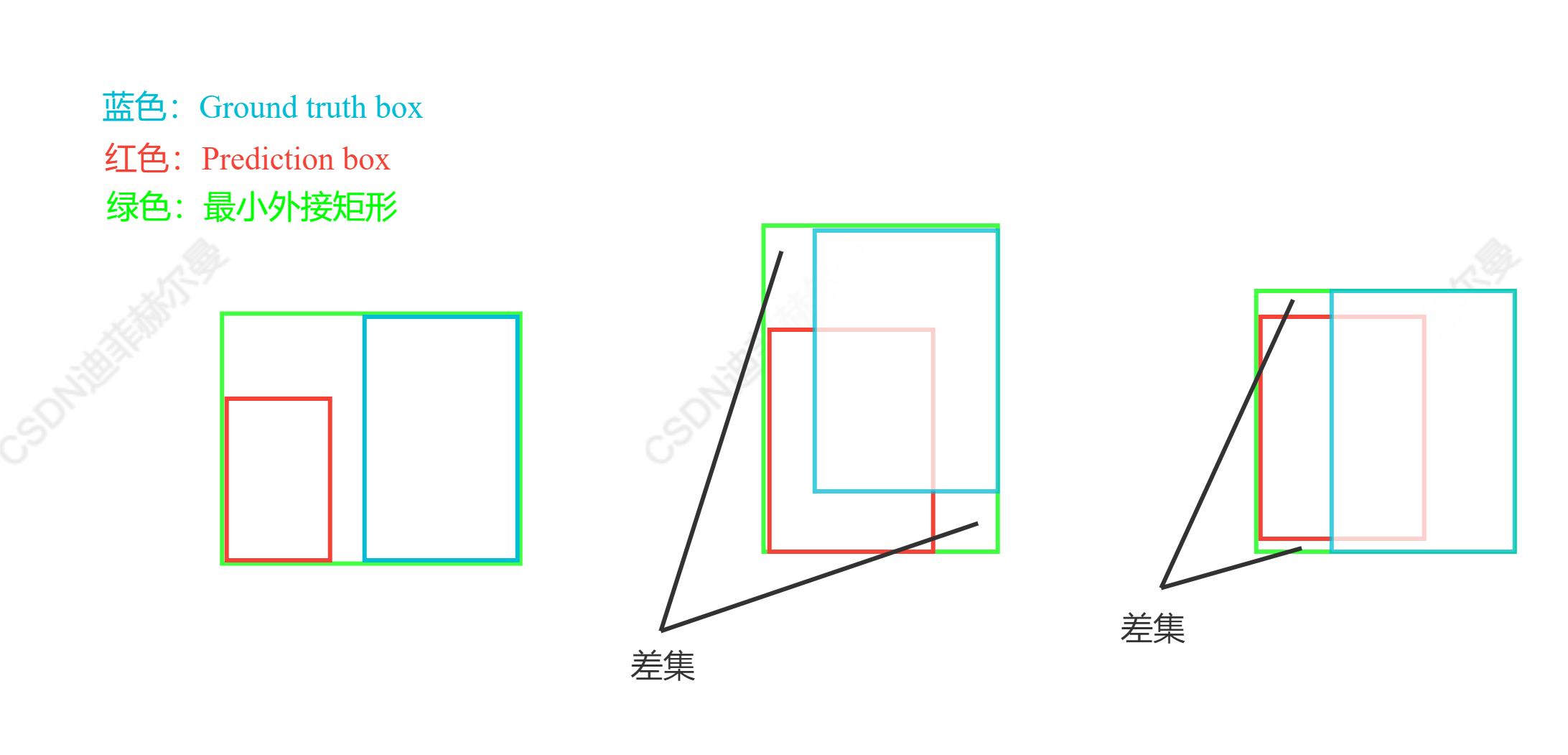
GIoU(CVPR2019)
针对
IoU
无法反映两个框是如何相交的问题,
GIoU
通过引入预测框和真实框的最小外接矩形(类似于图像处理中的闭包区域)来获取预测框、真实框在闭包区域中的比重。这样子,
GIoU
不仅可以关注重叠区域,还可以关注其他非重合区域,能比较好的反映两个框在闭包区域中的相交情况。


从公式上来看,
GIoU
是一种
IoU
的下界,取值范围
[-1,1]
。在两者重合的时候取最大值
1
,在两者无交集且无限远的时候取最小值
-1
。因此,与
IoU
相比,
GIoU
是一个比较好的距离度量指标。
DIoU(AAAI2020)
虽然
GIoU
通过引入闭包区域缓解了预测框与真实框相交位置的衡量问题,但其实际上仍存在两个问题:
- 对每个预测框与真实框均要去计算最小外接矩形,计算及收敛速度受到限制
- 当预测框在真实框内部时,
GIoU退化为IoU,也无法区分相对位置关系
因此,考虑到
GIoU
的缺点,
DIoU
在
IoU
的基础上直接回归两个框中心点的欧式距离,加速了收敛速度。
DIoU
的惩罚项是基于中心点的距离和对角线距离的比值。这样就避免了
GIoU
在两框距离较远时产生较大闭包时所造成的
Loss
值较大而难以优化的情况。

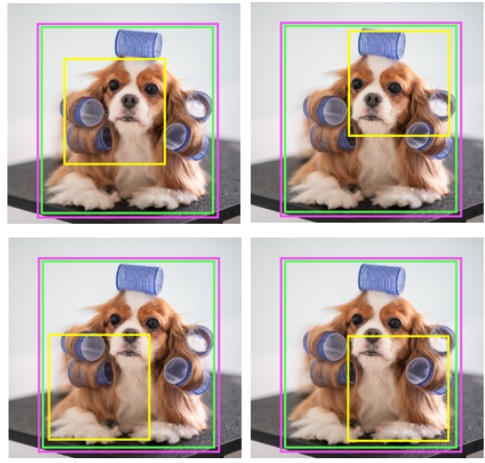
CIoU(AAAI2020)
虽然
DIoU Loss
通过中心点回归缓解了两框距离较远时难优化的问题,但
DIoU Loss
仍存在两框中心点重合,但宽高比不同时,
DIoU Loss
退化为
IoU Loss
的问题。因此,为了得到更加精准的预测框,
CIoU
在
DIoU
的基础上增加了一个影响因子,即增加了预测框与真实框之间长宽比的一致性的考量。


比如上面三种情况,目标框包裹预测框,本来
DIoU
可以起作用。
但预测框的中心点的位置都是一样的,因此按照
DIoU
的计算公式,三者的值都是相同的。
CIoU Loss
虽然考虑了边界框回归的重叠面积、中心点距离及长宽比。但是其公式中的v反映的时长宽比的差异,而不是宽高分别与其置信度的真实差异,所以有时会阻碍模型有效的优化。
EIoU(arXiv2021)
EIoU
在
CIoU
的基础上将长宽比拆开,明确地衡量了三个几何因素的差异,即重叠区域、中心点和边长,同时引入
Fcoal loss
解决了难易样本不平衡的问题。
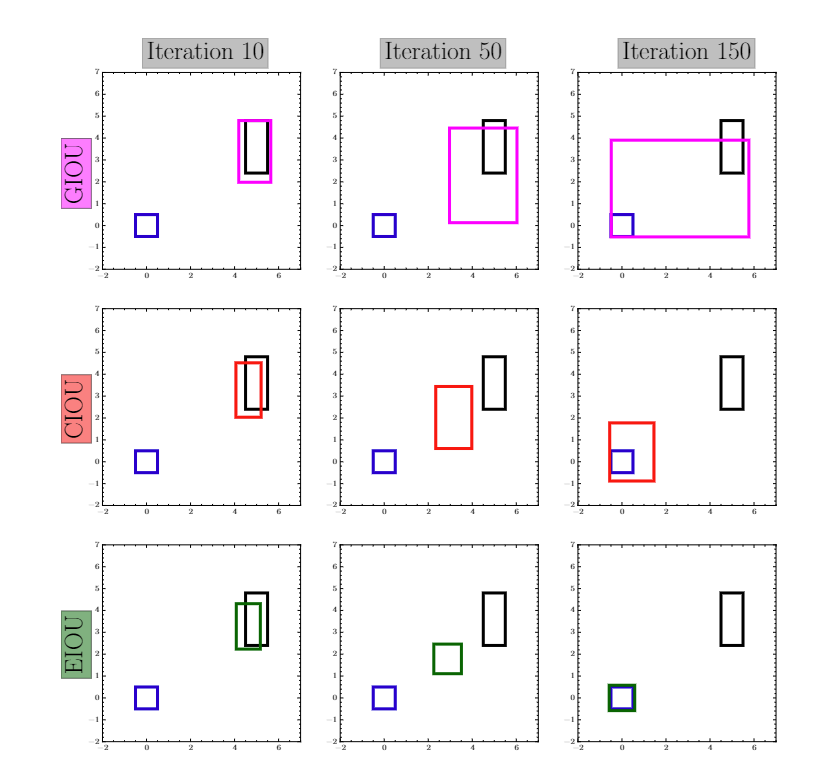


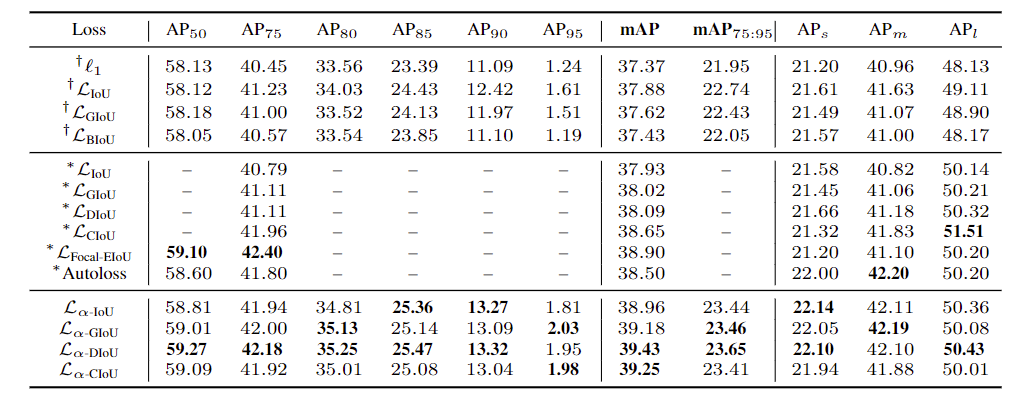
αIoU(NeurlPS2021)
αIoU
将现有的基于
IoU
的损失进行了一个推广
使得
αIoU
可以显着超越现有的基于
IoU
的损失,通过调节
α
,使探测器更灵活地实现不同水平的
bbox
回归精度,并且
αIoU
对小数据集和噪声的鲁棒性更强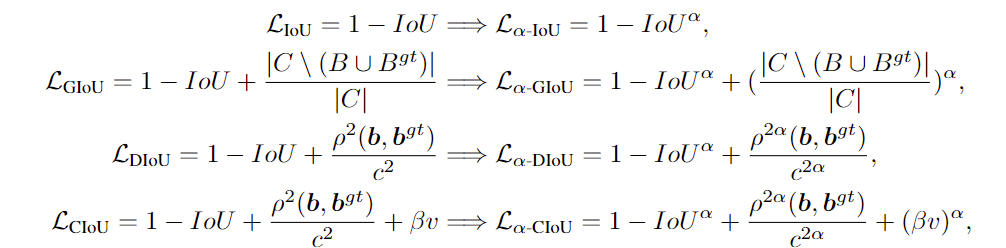
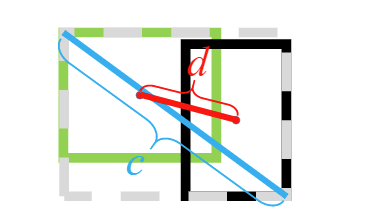
SIoU(arXiv2022)
传统的目标检测损失函数依赖于边界框回归指标的聚合,例如预测框和真实框(即
GIoU、CIoU、ICIoU
等)的距离、重叠区域和纵横比。然而,迄今为止提出和使用的方法都没有考虑期望的真实框和预测框之间不匹配的方向。这种不足导致收敛速度较慢且效率较低,因为预测框在训练过程中可能会“四处游荡”,最终会产生一个更差的模型。
SIoU
提出了一种新的损失函数,重新定义了惩罚度量,考虑了期望回归之间的向量夹角。
SIoU
损失函数由4个成本函数组成
Angle cost

Distance cost

Shape cost

IoU cost
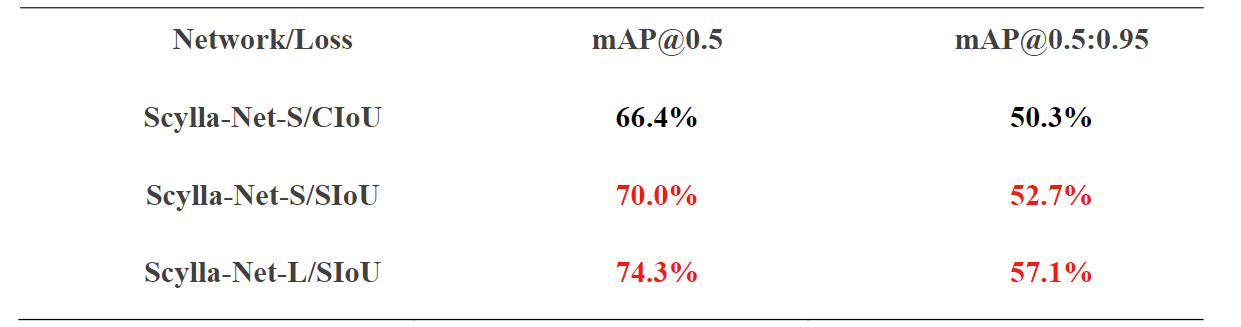
将
SIoU
应用于
COCO-train/COCO-val
与其他损失函数相比,提高了
+2.4%
(mAP@0.5:0.95) 和 +3.6%(mAP@0.5)
各IoU源代
IoU
import numpy as np
defIou(box1, box2, wh=False):if wh ==False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 =int(box1[0]-box1[2]/2.0),int(box1[1]-box1[3]/2.0)
xmax1, ymax1 =int(box1[0]+box1[2]/2.0),int(box1[1]+box1[3]/2.0)
xmin2, ymin2 =int(box2[0]-box2[2]/2.0),int(box2[1]-box2[3]/2.0)
xmax2, ymax2 =int(box2[0]+box2[2]/2.0),int(box2[1]+box2[3]/2.0)# 获取矩形框交集对应的左上角和右下角的坐标(intersection)
xx1 = np.max([xmin1, xmin2])
yy1 = np.max([ymin1, ymin2])
xx2 = np.min([xmax1, xmax2])
yy2 = np.min([ymax1, ymax2])# 计算两个矩形框面积
area1 =(xmax1-xmin1)*(ymax1-ymin1)
area2 =(xmax2-xmin2)*(ymax2-ymin2)
inter_area =(np.max([0, xx2-xx1]))*(np.max([0, yy2-yy1]))#计算交集面积
iou = inter_area /(area1+area2-inter_area+1e-6)#计算交并比return iou
GIoU
defGiou(rec1,rec2):#分别是第一个矩形左右上下的坐标
x1,x2,y1,y2 = rec1
x3,x4,y3,y4 = rec2
iou = Iou(rec1,rec2)
area_C =(max(x1,x2,x3,x4)-min(x1,x2,x3,x4))*(max(y1,y2,y3,y4)-min(y1,y2,y3,y4))
area_1 =(x2-x1)*(y1-y2)
area_2 =(x4-x3)*(y3-y4)
sum_area = area_1 + area_2
w1 = x2 - x1 #第一个矩形的宽
w2 = x4 - x3 #第二个矩形的宽
h1 = y1 - y2
h2 = y3 - y4
W =min(x1,x2,x3,x4)+w1+w2-max(x1,x2,x3,x4)#交叉部分的宽
H =min(y1,y2,y3,y4)+h1+h2-max(y1,y2,y3,y4)#交叉部分的高
Area = W*H #交叉的面积
add_area = sum_area - Area #两矩形并集的面积
end_area =(area_C - add_area)/area_C #闭包区域中不属于两个框的区域占闭包区域的比重
giou = iou - end_area
return giou
DIoU
defDiou(bboxes1, bboxes2):
rows = bboxes1.shape[0]
cols = bboxes2.shape[0]
dious = torch.zeros((rows, cols))if rows * cols ==0:#return dious
exchange =Falseif bboxes1.shape[0]> bboxes2.shape[0]:
bboxes1, bboxes2 = bboxes2, bboxes1
dious = torch.zeros((cols, rows))
exchange =True# #xmin,ymin,xmax,ymax->[:,0],[:,1],[:,2],[:,3]
w1 = bboxes1[:,2]- bboxes1[:,0]
h1 = bboxes1[:,3]- bboxes1[:,1]
w2 = bboxes2[:,2]- bboxes2[:,0]
h2 = bboxes2[:,3]- bboxes2[:,1]
area1 = w1 * h1
area2 = w2 * h2
center_x1 =(bboxes1[:,2]+ bboxes1[:,0])/2
center_y1 =(bboxes1[:,3]+ bboxes1[:,1])/2
center_x2 =(bboxes2[:,2]+ bboxes2[:,0])/2
center_y2 =(bboxes2[:,3]+ bboxes2[:,1])/2
inter_max_xy = torch.min(bboxes1[:,2:],bboxes2[:,2:])
inter_min_xy = torch.max(bboxes1[:,:2],bboxes2[:,:2])
out_max_xy = torch.max(bboxes1[:,2:],bboxes2[:,2:])
out_min_xy = torch.min(bboxes1[:,:2],bboxes2[:,:2])
inter = torch.clamp((inter_max_xy - inter_min_xy),min=0)
inter_area = inter[:,0]* inter[:,1]
inter_diag =(center_x2 - center_x1)**2+(center_y2 - center_y1)**2
outer = torch.clamp((out_max_xy - out_min_xy),min=0)
outer_diag =(outer[:,0]**2)+(outer[:,1]**2)
union = area1+area2-inter_area
dious = inter_area / union -(inter_diag)/ outer_diag
dious = torch.clamp(dious,min=-1.0,max=1.0)if exchange:
dious = dious.T
return dious
CIoU
defbbox_overlaps_ciou(bboxes1, bboxes2):
rows = bboxes1.shape[0]
cols = bboxes2.shape[0]
cious = torch.zeros((rows, cols))if rows * cols ==0:return cious
exchange =Falseif bboxes1.shape[0]> bboxes2.shape[0]:
bboxes1, bboxes2 = bboxes2, bboxes1
cious = torch.zeros((cols, rows))
exchange =True
w1 = bboxes1[:,2]- bboxes1[:,0]
h1 = bboxes1[:,3]- bboxes1[:,1]
w2 = bboxes2[:,2]- bboxes2[:,0]
h2 = bboxes2[:,3]- bboxes2[:,1]
area1 = w1 * h1
area2 = w2 * h2
center_x1 =(bboxes1[:,2]+ bboxes1[:,0])/2
center_y1 =(bboxes1[:,3]+ bboxes1[:,1])/2
center_x2 =(bboxes2[:,2]+ bboxes2[:,0])/2
center_y2 =(bboxes2[:,3]+ bboxes2[:,1])/2
inter_max_xy = torch.min(bboxes1[:,2:],bboxes2[:,2:])
inter_min_xy = torch.max(bboxes1[:,:2],bboxes2[:,:2])
out_max_xy = torch.max(bboxes1[:,2:],bboxes2[:,2:])
out_min_xy = torch.min(bboxes1[:,:2],bboxes2[:,:2])
inter = torch.clamp((inter_max_xy - inter_min_xy),min=0)
inter_area = inter[:,0]* inter[:,1]
inter_diag =(center_x2 - center_x1)**2+(center_y2 - center_y1)**2
outer = torch.clamp((out_max_xy - out_min_xy),min=0)
outer_diag =(outer[:,0]**2)+(outer[:,1]**2)
union = area1+area2-inter_area
u =(inter_diag)/ outer_diag
iou = inter_area / union
with torch.no_grad():
arctan = torch.atan(w2 / h2)- torch.atan(w1 / h1)
v =(4/(math.pi **2))* torch.pow((torch.atan(w2 / h2)- torch.atan(w1 / h1)),2)
S =1- iou
alpha = v /(S + v)
w_temp =2* w1
ar =(8/(math.pi **2))* arctan *((w1 - w_temp)* h1)
cious = iou -(u + alpha * ar)
cious = torch.clamp(cious,min=-1.0,max=1.0)if exchange:
cious = cious.T
return cious
参考文献
https://mp.weixin.qq.com/s/jLnde0Xms-99g4z16OE9VQ
DIoU、CIoU、GIoU、IoU再理解结合代码
IoU:《UnitBox: An Advanced Object Detection Network》
GIoU:《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》
D/C IoU:《Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression》
EIoU:《Focal and Efficient IOU Loss for Accurate Bounding Box Regression》
αIoU:《Alpha-IoU: A Family of Power Intersection over Union Losses for Bounding Box Regression》
SIoU:《SIoU Loss: More Powerful Learning for Bounding Box Regression》
版权归原作者 迪菲赫尔曼 所有, 如有侵权,请联系我们删除。