
参考文章地址:逐飞科技STC16F开源库来啦
STC16F开源库简介
STC16F开源库继续沿用逐飞其他开源库的代码风格,使用过逐飞库的同学应该知道,逐飞库的特点是简洁易懂,容易上手。本次STC16F开源库使用MDK FOR C251进行编写。虽然说MDK FOR C251这个版本的IDE听着很陌生,但它还是属于MDK,所以IDE上手还是很容易的。开源库使用单片机寄存器作为最底层。然后将各个模块使用的寄存器进行二次封装,提升易用性。如果有同学有更多需求,发现库的现有功能不满足自己使用需求时,可以采用同样的方式自己调用寄存器来实现所需要的功能。大家可以通过我们的库来学习寄存器怎么使用,当自己学会怎么使用官方的寄存器之后也可以直接使用寄存器,这样的好处就是没有多余的代码,降低自己代码的体积,提高效率。我们也并不希望用户只会用我们的库来做开发,制作开源库的目的是希望初学者不被门槛给拦在外面,提供一个入门学习的渠道。
首先来看一看STC16F开源库的目录结构图:
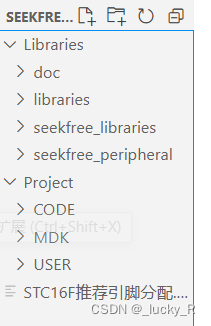
Libraries文件夹下放置的是STC头文件,以及数据类型声明,board等文件。
seekfree_libraries文件夹下放置的是逐飞科技精心编写的底层驱动,底层驱动是用STC提供的头文件进行二次封装,以简化各个模块的使用步骤,使用更加方便。如果不是参加竞赛的用户可以使用这一层的驱动来实现STC16F的快速上手,也可以通过查看我们的代码用于寄存器如何使用。目前支持ADC、EXTI、IIC、SPI、PIT、CTIME、UART。如果有需要其他功能亦可直接调用寄存器来实现其他功能。
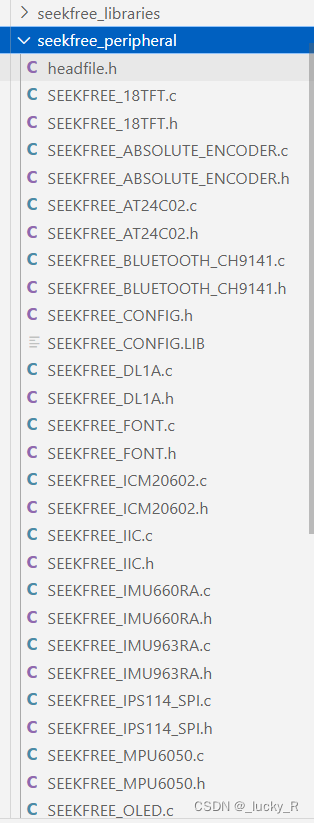
seekfree_peripheral文件夹下放置的是各类常用的模块驱动,当使用到这些模块时只需要调用函数即可实现相应的功能,非常的简单方便。目前实现线性CCD、1.8寸TFT、ICM20602六轴陀螺仪、IIC通讯协议(模拟IO)、1.14寸IPS液晶屏、MPU6050六轴陀螺仪、OLED显示屏、虚拟示波器通讯协议、无线转串口模块。
CODE文件夹下放置的是用户自己添加的代码文件,当用户自己添加文件的时候我们建议全部添加在这个文件夹内。
USER文件夹下放置的是main.c、isr.h、isr.c文件。
底层驱动功能模块
目前逐飞STC16F库实现了芯片中ADC、SPI、UART、GPIO、PIT、DELAY、EXTI、CTIMR功能模块的使用,以下几个模块单独说明下:
GPIO模块,STC的16****位机,还是沿用了以前的89C52引脚控制的思路,通过位绑定去控制引脚,这样就及其方便地控制引脚输出和获取引脚输入。我们所编写的GPIO模块包含了GPIO模式选择,上拉使能。
sfr P0 = 0x80;
sbit P00 = P0^0;
sbit P01 = P0^1;
sbit P02 = P0^2;
sbit P03 = P0^3;
sbit P04 = P0^4;
sbit P05 = P0^5;
sbit P06 = P0^6;
sbit P07 = P0^7;
EXTI****模块,外部中断模块包含了五个外部中断源触发中断,其中INT0和INT1支持边沿触发+下降沿触发,其他三个只支持下降沿触发。
PWM****模块,STC16F具有两组PWM,这样就可以使用一组PWM输出50HZ的频率控制舵机,另外一组PWM输出17KHZ的频率控制电机。
CTIMR****模块,CTIMR模块是通过定时器外部计数,作为输入捕获。一共有五个定时器,最多实现五个CTIMER模块,每个模块可以实现一路编码器的脉冲采集,这样就可以采集逐飞带方向输出的编码器数据。
PIT****模块,通过定时器模块,进行周期中断。
常用外设模块的底层适配
逐飞开源库包含各个常用外设模块的底层适配 :
关键位置
在src文件夹下有2个文件,isr.c存放中断函数,main.c放主函数
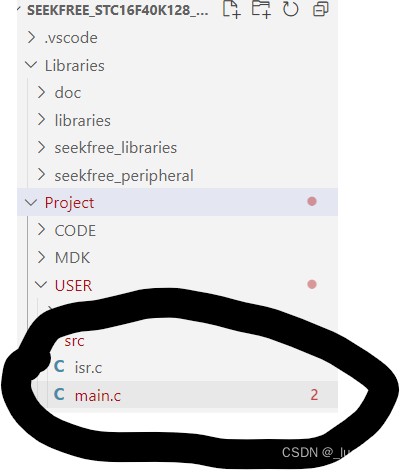
main.c内容如下,哪里放初始化函数,哪里放需要循环的代码,这里标记地很清楚
/*********************************************************************************************************************
* COPYRIGHT NOTICE
* Copyright (c) 2020,逐飞科技
* All rights reserved.
* 技术讨论QQ群:一群:179029047(已满) 二群:244861897(已满) 三群:824575535
*
* 以下所有内容版权均属逐飞科技所有,未经允许不得用于商业用途,
* 欢迎各位使用并传播本程序,修改内容时必须保留逐飞科技的版权声明。
*
* @file main
* @company 成都逐飞科技有限公司
* @author 逐飞科技(QQ790875685)
* @version 查看doc内version文件 版本说明
* @Software MDK FOR C251 V5.60
* @Target core STC16F40K128
* @Taobao https://seekfree.taobao.com/
* @date 2020-12-18
********************************************************************************************************************/
#include "headfile.h"
/*
*关于内核频率的设定,可以查看board.h文件
*在board_init中,已经将P54引脚设置为复位
*如果需要使用P54引脚,可以在board.c文件中的board_init()函数中删除SET_P54_RESRT即可
*/
void main()
{
//sys_clk可选值:33177600, 30000000, 27000000. 24000000, 22118400, 20000000, 18432000, 12000000, 11059200, 6000000, 5529600。
//设置系统频率,此频率需要跟STC-ISP软件中的 <输入用户程序运行时的IRC频率>选项的频率一致。
//如果频率设置不对,将会导致串口的数据不正常,PWM的工作不正常等等。
sys_clk = 30000000; //设置系统频率为30MHz
board_init(); //初始化寄存器
//此处编写用户代码(例如:外设初始化代码等)
while(1)
{
//此处编写需要循环执行的代码
}
}
isr.c如下:
///*********************************************************************************************************************
// * COPYRIGHT NOTICE
// * Copyright (c) 2020,逐飞科技
// * All rights reserved.
// * 技术讨论QQ群:一群:179029047(已满) 二群:244861897(已满) 三群:824575535
// *
// * 以下所有内容版权均属逐飞科技所有,未经允许不得用于商业用途,
// * 欢迎各位使用并传播本程序,修改内容时必须保留逐飞科技的版权声明。
// *
// * @file isr
// * @company 成都逐飞科技有限公司
// * @author 逐飞科技(QQ790875685)
// * @version 查看doc内version文件 版本说明
// * @Software MDK FOR C251 V5.60
// * @Target core STC16F40K128
// * @Taobao https://seekfree.taobao.com/
// * @date 2020-4-14
// ********************************************************************************************************************/
#include "headfile.h"
//UART1中断
void UART1_Isr() interrupt 4
{
uint8 res;
static uint8 dwon_count;
if(UART1_GET_TX_FLAG)
{
UART1_CLEAR_TX_FLAG;
busy[1] = 0;
}
if(UART1_GET_RX_FLAG)
{
UART1_CLEAR_RX_FLAG;
res = SBUF;
//程序自动下载
if(res == 0x7F)
{
if(dwon_count++ > 20)
IAP_CONTR = 0x60;
}
else
{
dwon_count = 0;
}
}
}
//UART2中断
void UART2_Isr() interrupt 8
{
if(UART2_GET_TX_FLAG)
{
UART2_CLEAR_TX_FLAG;
busy[2] = 0;
}
if(UART2_GET_RX_FLAG)
{
UART2_CLEAR_RX_FLAG;
//接收数据寄存器为:S2BUF
}
}
//UART3中断
void UART3_Isr() interrupt 17
{
if(UART3_GET_TX_FLAG)
{
UART3_CLEAR_TX_FLAG;
busy[3] = 0;
}
if(UART3_GET_RX_FLAG)
{
UART3_CLEAR_RX_FLAG;
//接收数据寄存器为:S3BUF
}
}
//UART4中断
void UART4_Isr() interrupt 18
{
if(UART4_GET_TX_FLAG)
{
UART4_CLEAR_TX_FLAG;
busy[4] = 0;
}
if(UART4_GET_RX_FLAG)
{
UART4_CLEAR_RX_FLAG;
//接收数据寄存器为:S4BUF;
if(wireless_type == WIRELESS_SI24R1)
{
wireless_uart_callback(); //无线转串口回调函数
}
else if(wireless_type == WIRELESS_CH9141)
{
bluetooth_ch9141_uart_callback(); //蓝牙转串口回调函数
}
else if(wireless_type == WIRELESS_CH573)
{
wireless_ch573_callback(); //CH573无线模块回调函数
}
}
}
#define LED P52
void INT0_Isr() interrupt 0
{
LED = 0; //点亮LED
}
void INT1_Isr() interrupt 2
{
}
void INT2_Isr() interrupt 10
{
INT2_CLEAR_FLAG; //清除中断标志
}
void INT3_Isr() interrupt 11
{
INT3_CLEAR_FLAG; //清除中断标志
}
void INT4_Isr() interrupt 16
{
INT4_CLEAR_FLAG; //清除中断标志
}
void TM0_Isr() interrupt 1
{
}
void TM1_Isr() interrupt 3
{
}
void TM2_Isr() interrupt 12
{
TIM2_CLEAR_FLAG; //清除中断标志
}
void TM3_Isr() interrupt 19
{
TIM3_CLEAR_FLAG; //清除中断标志
}
void TM4_Isr() interrupt 20
{
TIM4_CLEAR_FLAG; //清除中断标志
// ccd_collect(); //CCD采集数据
}
//void INT0_Isr() interrupt 0;
//void TM0_Isr() interrupt 1;
//void INT1_Isr() interrupt 2;
//void TM1_Isr() interrupt 3;
//void UART1_Isr() interrupt 4;
//void ADC_Isr() interrupt 5;
//void LVD_Isr() interrupt 6;
//void PCA_Isr() interrupt 7;
//void UART2_Isr() interrupt 8;
//void SPI_Isr() interrupt 9;
//void INT2_Isr() interrupt 10;
//void INT3_Isr() interrupt 11;
//void TM2_Isr() interrupt 12;
//void INT4_Isr() interrupt 16;
//void UART3_Isr() interrupt 17;
//void UART4_Isr() interrupt 18;
//void TM3_Isr() interrupt 19;
//void TM4_Isr() interrupt 20;
//void CMP_Isr() interrupt 21;
//void I2C_Isr() interrupt 24;
//void USB_Isr() interrupt 25;
//void PWM1_Isr() interrupt 26;
//void PWM2_Isr() interrupt 27;
将需要放入中断的函数放入对应位置即可。
注意:使用需进行初始化,eg:
pit_timer_ms(TIM_4, 1); //使用TIMER作为周期中断,时间1ms一次
调用模块
在了解逐飞库的结构之后,接下来尝试驱动一些模块。
逐飞科技的个人空间-逐飞科技个人主页-哔哩哔哩视频
这是逐飞的哔哩哔哩主页,我们找到“核心板与智能车常用模块搭配使用视频教程”系列视频,跟着视频学会调用常用的模块。

应用举例
下面我以让“屏幕显示字符 ”这一简单的例子,来讲解如何将调用代码,并于实物相联系。
- 首先看一下,手里的屏幕是什么型号,有哪些引脚

- 我这里用1.8寸液晶屏LCD举例,在seekfree_peripheral文件夹下,可以找到18TFT相应的文件,
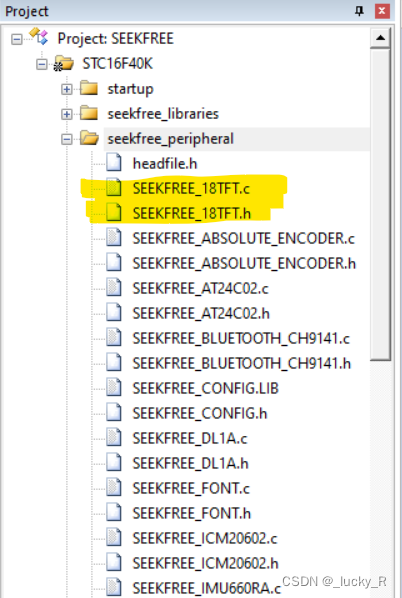
打开18TFT.h文件,可以看到注释:
接线定义: ------------------------------------ 模块管脚 单片机管脚 SCL 查看TFT_SCL宏定义的引脚 硬件SPI引脚不可随意切换 SDA 查看TFT_SDA宏定义的引脚 硬件SPI引脚不可随意切换 RES 查看REST_PIN宏定义的引脚 DC 查看DC_PIN宏定义的引脚 CS 查看TFT_CS宏定义的引脚 硬件SPI引脚不可随意切换 电源引脚 BL 3.3V电源(背光控制引脚,也可以接PWM来控制亮度) VCC 3.3V电源 GND 电源地 最大分辨率128*160 ------------------------------------
然后代码里定义了单片机管脚
//--------------------软件SPI--------------------
#define TFT_SCL_SIMSPI_PIN P25 //定义SPI_SCK引脚
#define TFT_SDA_SIMSPI_PIN P23 //定义SPI_MOSI引脚
#define TFT_REST_SIMSPI_PIN P20 //定义复位引脚
#define TFT_DC_SIMSPI_PIN P21 //液晶命令位引脚定义
#define TFT_CS_SIMSPI_PIN P22 //定义SPI_CS引脚
#define TFT_BL_SIMSPI_PIN P27 //液晶背光引脚定义
#define TFT_SCL_SIMSPI(x) (TFT_SCL_SIMSPI_PIN = x)
#define TFT_SDA_SIMSPI(x) (TFT_SDA_SIMSPI_PIN = x)
#define TFT_REST_SIMSPI(x) (TFT_REST_SIMSPI_PIN = x)
#define TFT_DC_SIMSPI(x) (TFT_DC_SIMSPI_PIN = x)
#define TFT_CS_SIMSPI(x) (TFT_CS_SIMSPI_PIN = x)
#define TFT_BL_SIMSPI(x) (TFT_BL_SIMSPI_PIN = x)
//--------------------硬件SPI--------------------
#define TFT_SPIN SPI_CH2 //定义使用的SPI号
#define TFT_SCL_PIN SPI_CH2_SCLK_P25 //定义SPI_SCK引脚
#define TFT_SDA_PIN SPI_CH2_MOSI_P23 //定义SPI_MOSI引脚
#define TFT_SDA_IN_PIN SPI_CH2_MISO_P24 //定义SPI_MISO引脚 TFT屏幕没有MISO引脚,但是这里任然需要定义,在spi的初始化时需要使用
#define TFT_REST_PIN P20
#define TFT_DC_PIN P21 //液晶命令位引脚定义
#define TFT_CS_PIN P22 //定义SPI_CS引脚
#define TFT_BL_PIN P27 //液晶背光引脚定义
#define TFT_REST(x) (TFT_REST_PIN= x)
#define TFT_DC(x) (TFT_DC_PIN = x)
#define TFT_CS(x) (TFT_CS_PIN = x)
#define TFT_BL(x) (TFT_BL_PIN = x)
根据上面的两个信息,我们可以将屏幕和单片机用杜邦线联系起来。
- 这里是TFT的一些函数,jiaru

使用屏幕之前需要初始化,对应的是这个函数
void lcd_init(void);
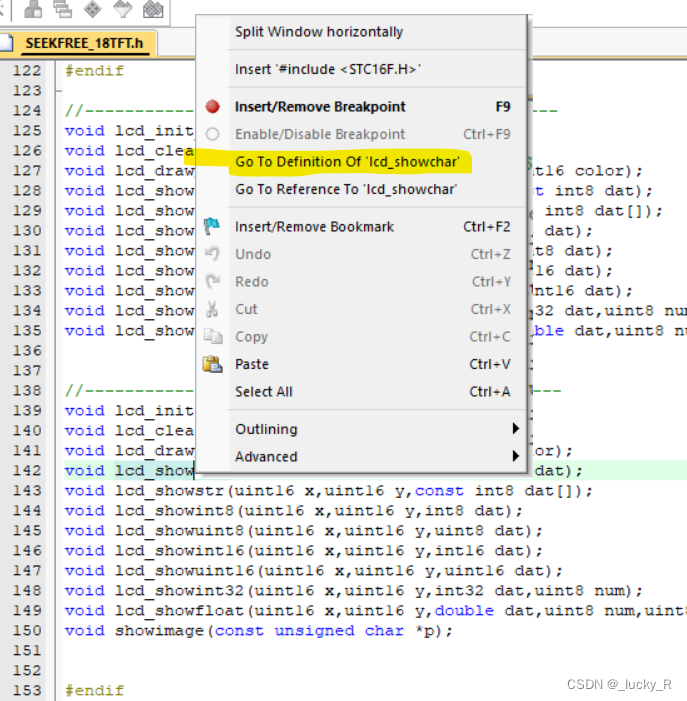
我们要显示一个字符,对应的是这个
void lcd_showchar(uint16 x,uint16 y,const int8 dat);
右击鼠标,点go to definition 可以看到该函数的定义
//-------------------------------------------------------------------------------------------------------------------
// @brief 液晶显示字符
// @param x 坐标x方向的起点 参数范围 0 -(TFT_X_MAX-1)
// @param y 坐标y方向的起点 参数范围 0 -(TFT_Y_MAX/16-1)
// @param dat 需要显示的字符
// @return void
// @since v1.0
// Sample usage: lcd_showchar(0,0,'x');//坐标0,0写一个字符x
//-------------------------------------------------------------------------------------------------------------------
void lcd_showchar(uint16 x,uint16 y,const int8 dat)
{
uint8 i,j;
uint8 temp;
for(i=0; i<16; i++)
{
lcd_set_region(x,y+i,x+7,y+i);
temp = tft_ascii[dat-32][i];//减32因为是取模是从空格开始取得 空格在ascii中序号是32
for(j=0; j<8; j++)
{
if(temp&0x01) lcd_writedata_16bit(TFT_PENCOLOR);
else lcd_writedata_16bit(TFT_BGCOLOR);
temp>>=1;
}
}
}
接下来就开始调用代码了,
打开main.c
首先,放上初始化函数
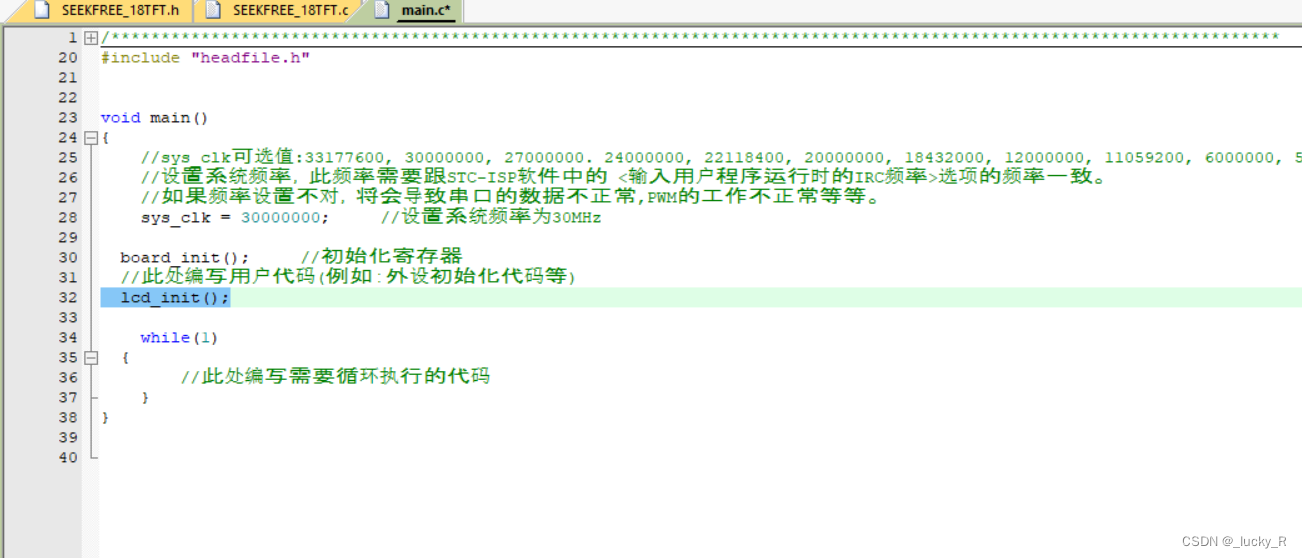
接着,我们在while里放上显示字符的函数:
#include "headfile.h"
void main()
{
//sys_clk可选值:33177600, 30000000, 27000000. 24000000, 22118400, 20000000, 18432000, 12000000, 11059200, 6000000, 5529600。
//设置系统频率,此频率需要跟STC-ISP软件中的 <输入用户程序运行时的IRC频率>选项的频率一致。
//如果频率设置不对,将会导致串口的数据不正常,PWM的工作不正常等等。
sys_clk = 30000000; //设置系统频率为30MHz
board_init(); //初始化寄存器
//此处编写用户代码(例如:外设初始化代码等)
lcd_init();
while(1)
{
//此处编写需要循环执行的代码
lcd_showchar(0,0,'X');
}
}
然后,编译、烧录、上电,就实现了在屏幕上显示一个字符X
系列文章目录
文章分为三个层次
速通版是希望通过简化的步骤搭建出寻迹小车,进而了解整个智能车是如何实现的,快速上手,为后续参与智能车竞赛做基础。
如果只是为了完成学校智能车初期培训,做出能简单循迹的小车,可以看这个速通版。
全程引导篇是讲了做出能够完赛的智能车的整个过程,大部分文章只是简单点拨一下,但是附上了相关的文章链接,方便根据自己的情况深入了解。
全程引导篇,能够带你比较系统地了解整个智能车的制作过程,推荐备赛初期或者有车模之后学习。
详细讲解篇是全程引导篇的补充,由于全程引导篇是引导性质,文章内容只是点拨,缺乏相应的原理或代码讲解,因此写详细讲解篇作为补充。
详细讲解篇会渗透在全程引导篇中。
速通版
智能小车速通版——手把手教程
全程引导篇
智能车入门——IDE安装以及库函数选用
智能车入门——编程语言(c)的学习
智能车入门——简单驱动常用模块
智能车入门——车模器件篇
智能车入门——模块化编程
智能车入门——跑车前的零碎知识
智能车入门——电磁循迹原理与实现
智能车入门——实现低速完赛
详细讲解篇
智能车入门补充篇
智能车入门补充篇——逐飞开源库介绍
智能车入门补充篇——常见宏定义和使用
智能车入门补充篇——模块化编程
智能车入门补充篇——电感值处理、转向控制与巡线
智能车入门补充篇——元素识别
智能车模块详解——按键及按键调参
智能车模块详解——数据存储与读写(eeprom/flash)
智能车入门——I/O、PWM
智能车入门——中断
智能车入门——编码器
智能车入门——陀螺仪
智能车入门——摄像头和CCD
智能车入门——舵机
(更新中)
版权归原作者 _lucky_R 所有, 如有侵权,请联系我们删除。