
提示:参考《ROS2理论与实践核心篇》
文章目录
前言
- VMware虚拟机系统:Ubuntu22.04
- ROS2:humble
ROS2安装:
1、设置语言环境
2、准备Ubuntu universe存储库
3、设置软件源
4、安装ROS2
5、配备环境
一、前期准备
1、设置语言环境
语言环境可以不同,但是一定要保证支持UTF-8:
运行代码检查:
locale
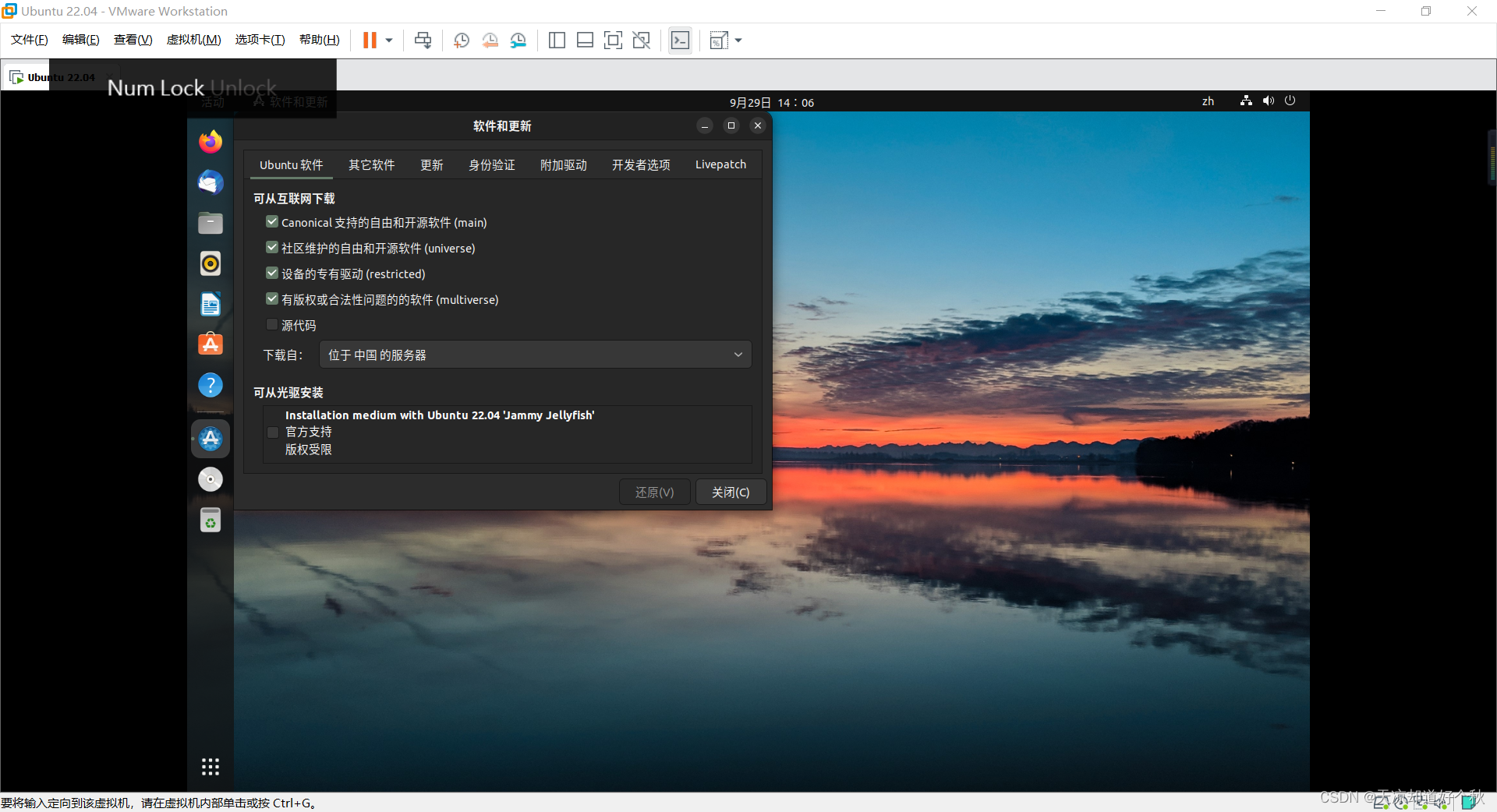
2、准备Ubuntu universe存储库
显示应用程序—软件和更新:
提示:注意这里需要虚拟机联网操作,如没有联网可以参考链接: http://t.csdn.cn/G1jjN
设置镜像为阿里云: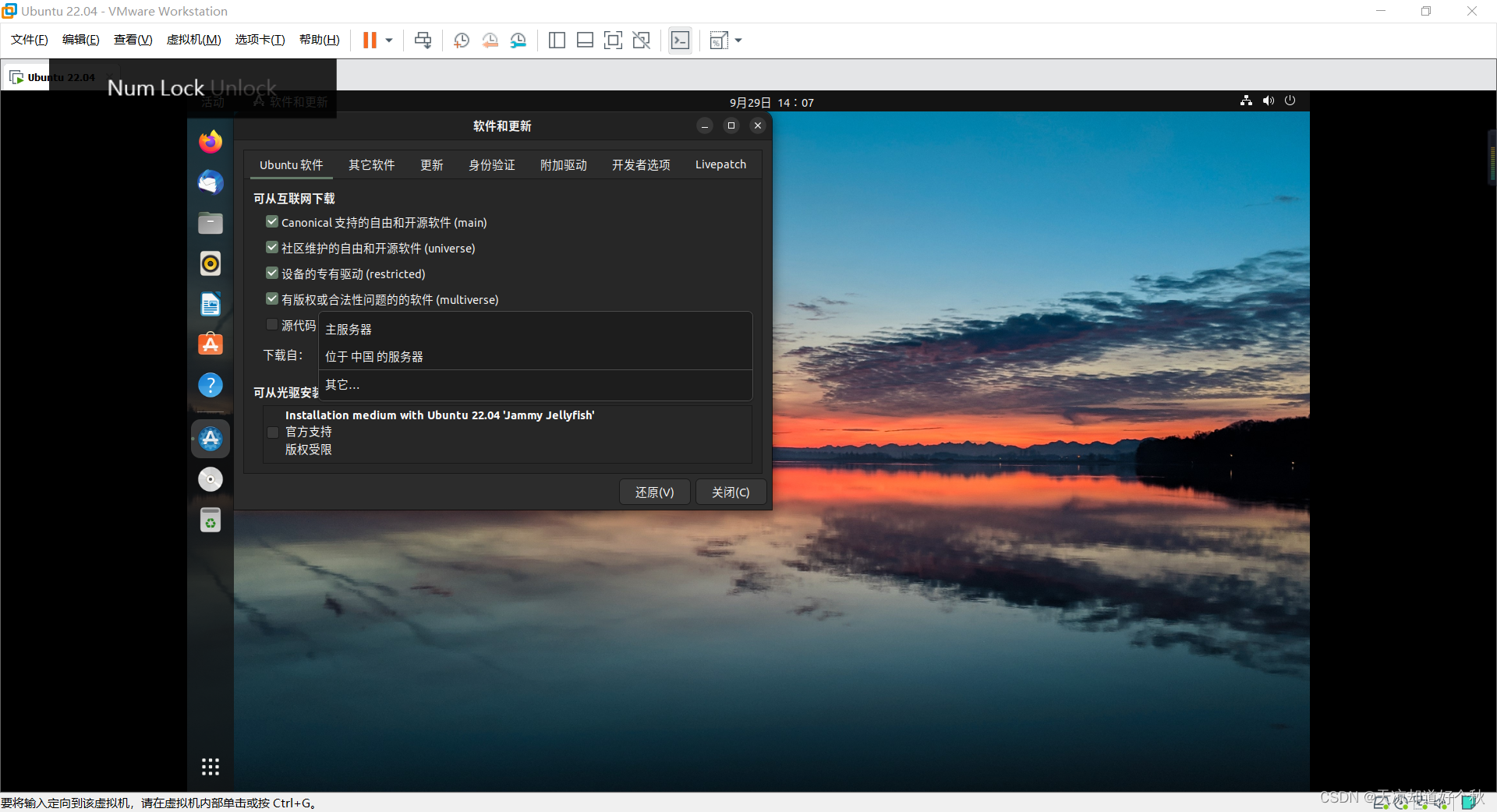
点击其他选项,下滑找到阿里云: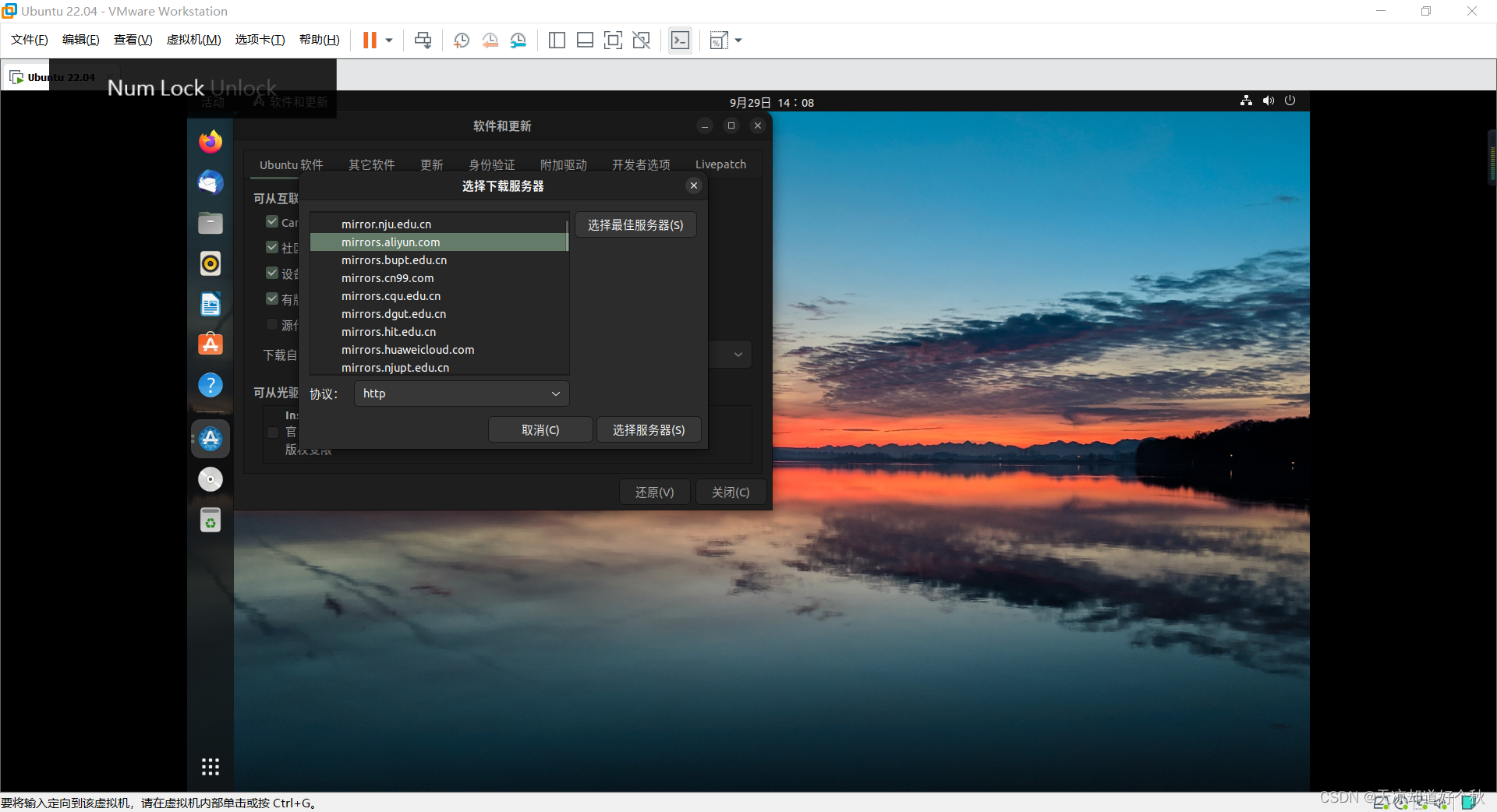
点击选择,输入账户密码即可: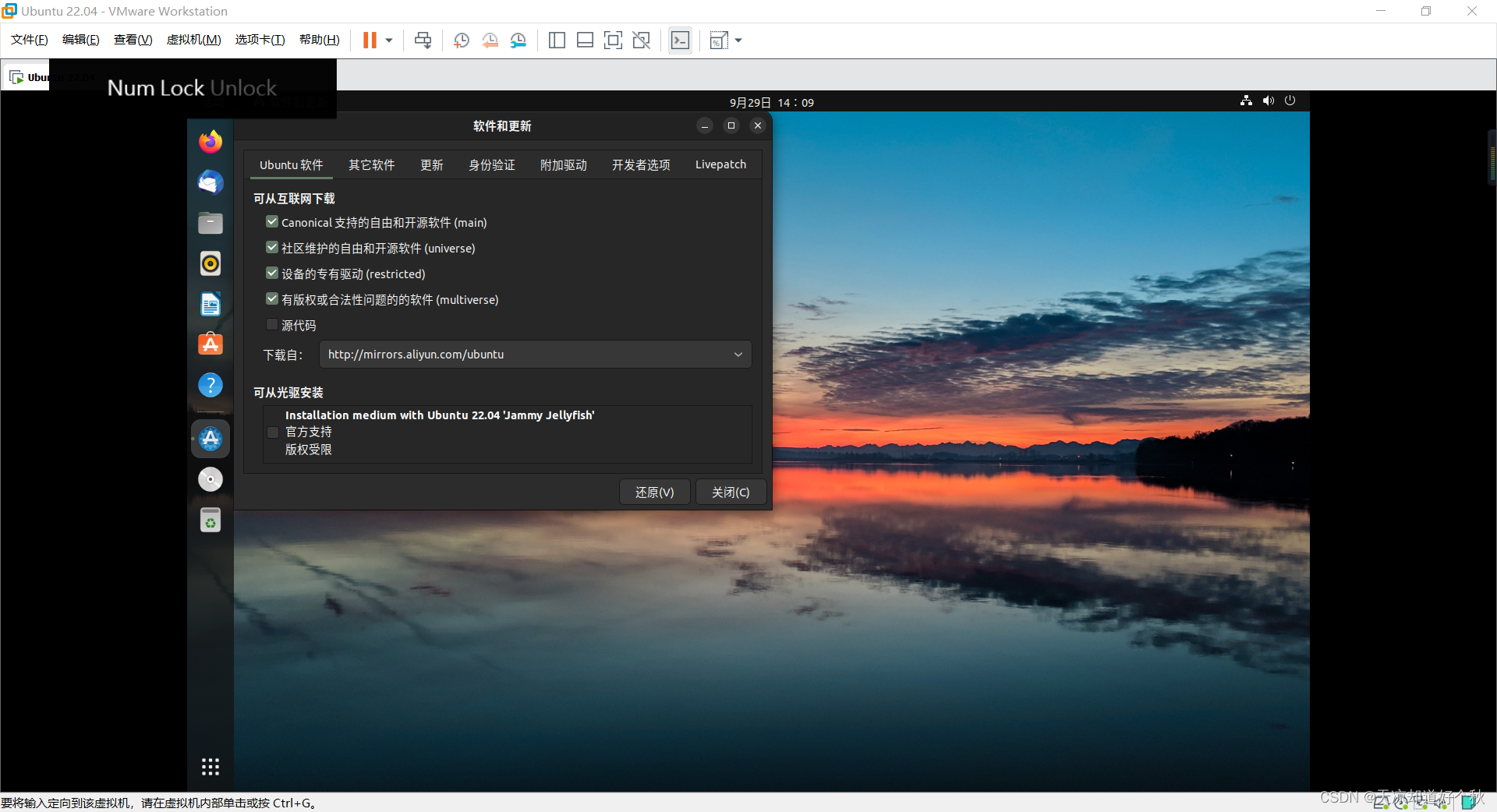
提醒更新缓存,等待即可:
3、设置软件源
指令1:
sudoapt update &&sudoaptinstallcurl gnupg lsb-release
输入密码,保证网络连接无问题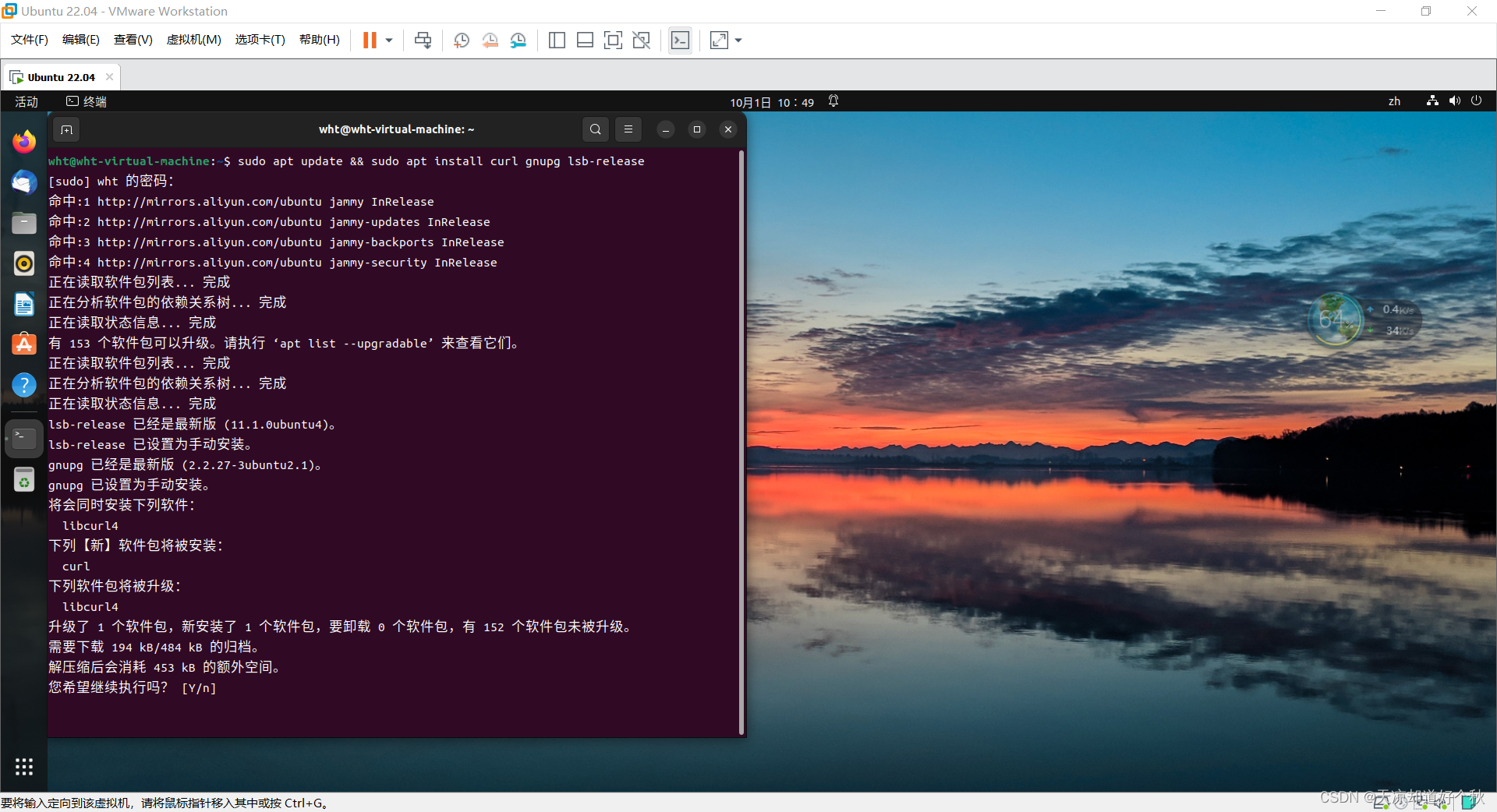
按提示输入y等待安装完毕即可:
下面的操作国内用户基本会报出连接 raw.githubusercontent.com 失败的异常信息:
这是因为DNS被污染,因此我们需要先解决这个问题。
方法:
(1)访问 https://www.ipaddress.com/ ,点击Go to Homepage,并输入域名 raw.githubusercontent.com,查询 ip 地址;
ip地址:
185.199.108.133|185.199.109.133|185.199.110.133|185.199.111.133
任意选择一个使用。
(2)修改/etc/hosts文件:
sudo gedit /etc/hosts
(3)添加域名与IP映射:
185.199.109.133 raw.githubusercontent.com
保存后关闭: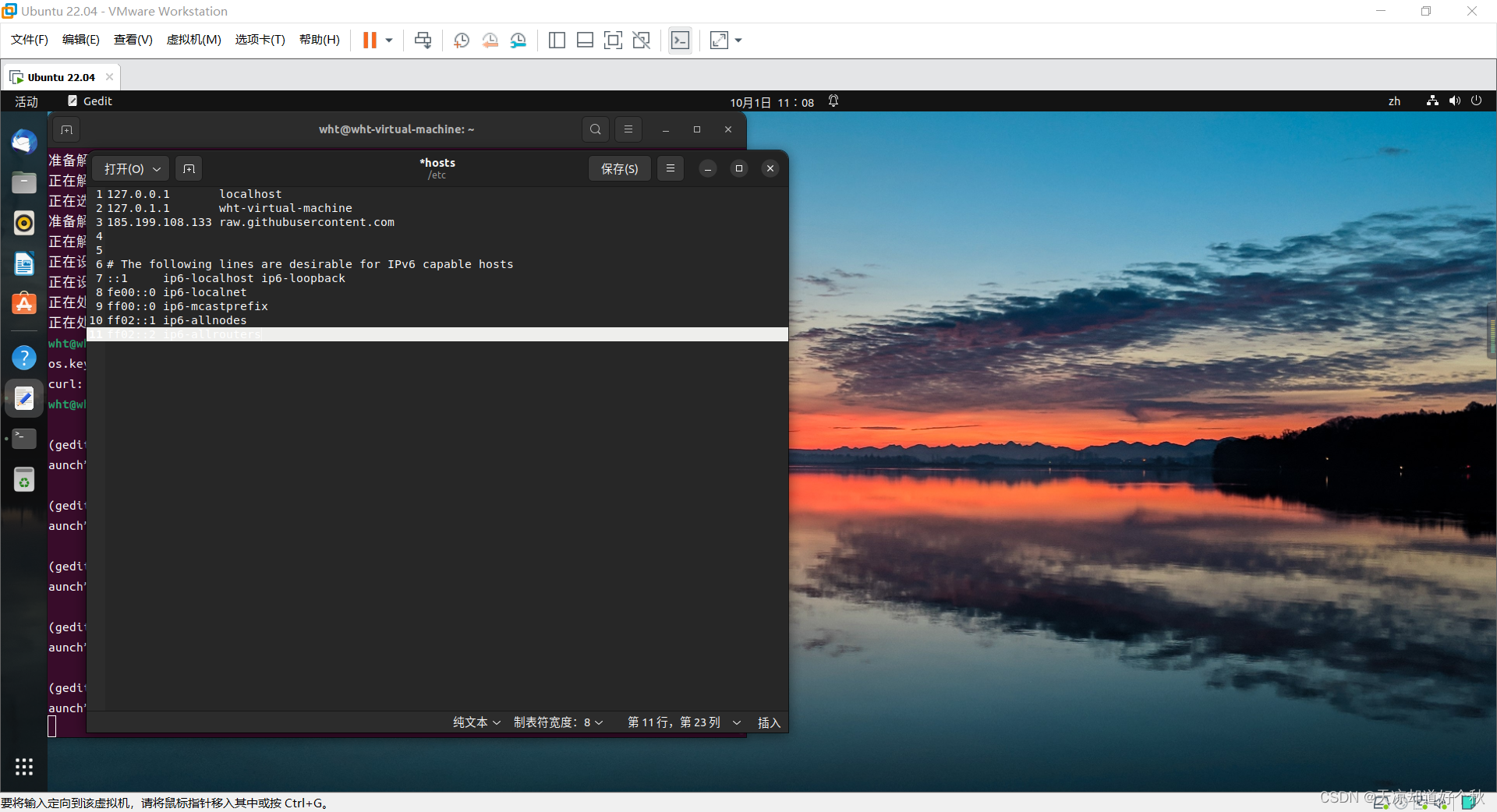
指令2:
sudocurl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg

如图所示则表示操作成功。
指令3:将存储库添加到源列表:
echo"deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release &&echo $UBUNTU_CODENAME) main"|sudotee /etc/apt/sources.list.d/ros2.list > /dev/null

二、安装ROS2步骤
1.更新apt存储库缓存,并升级软件包
代码如下(示例):
sudo apt update
sudo apt upgrade
等待安装完成即可。
2.安装桌面版ROS2
在终端中输入以下代码:
sudo apt install ros-humble-desktop
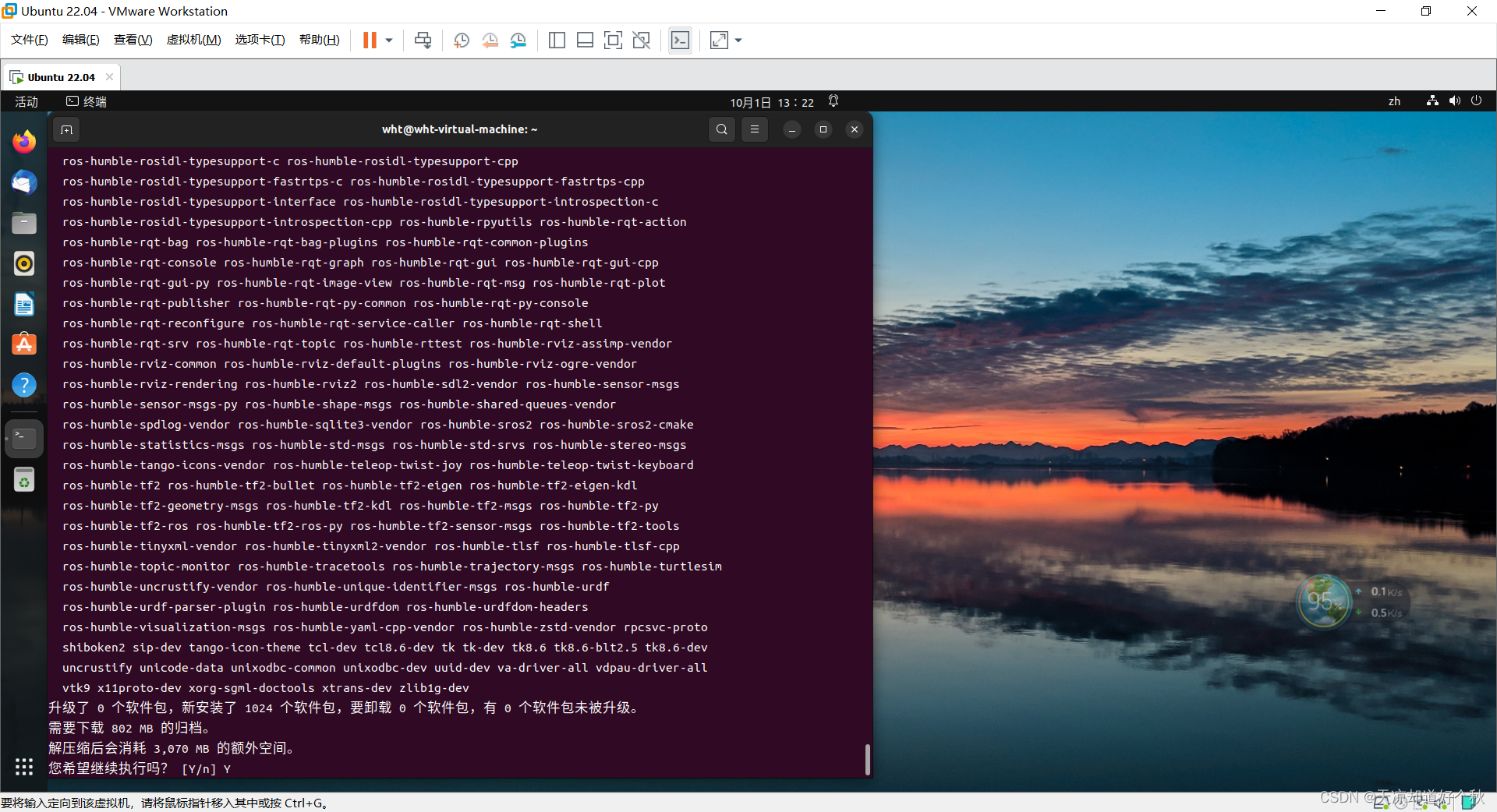
下载内容比较大,耗时较多,需要耐心等待…
如果出现连接不上的问题,推荐切换一下网络换成手机热点,或者多尝试下载几次。
可以再次输入命令,检查是否完整安装;
3.配置环境
终端代码如下:
source /opt/ros/humble/setup.bash
将配置环境代码添入配置文件中,省去手动输入:
echo"source /opt/ros/humble/setup.bash">> ~/.bashrc
执行
ros2
测试配置是否完成: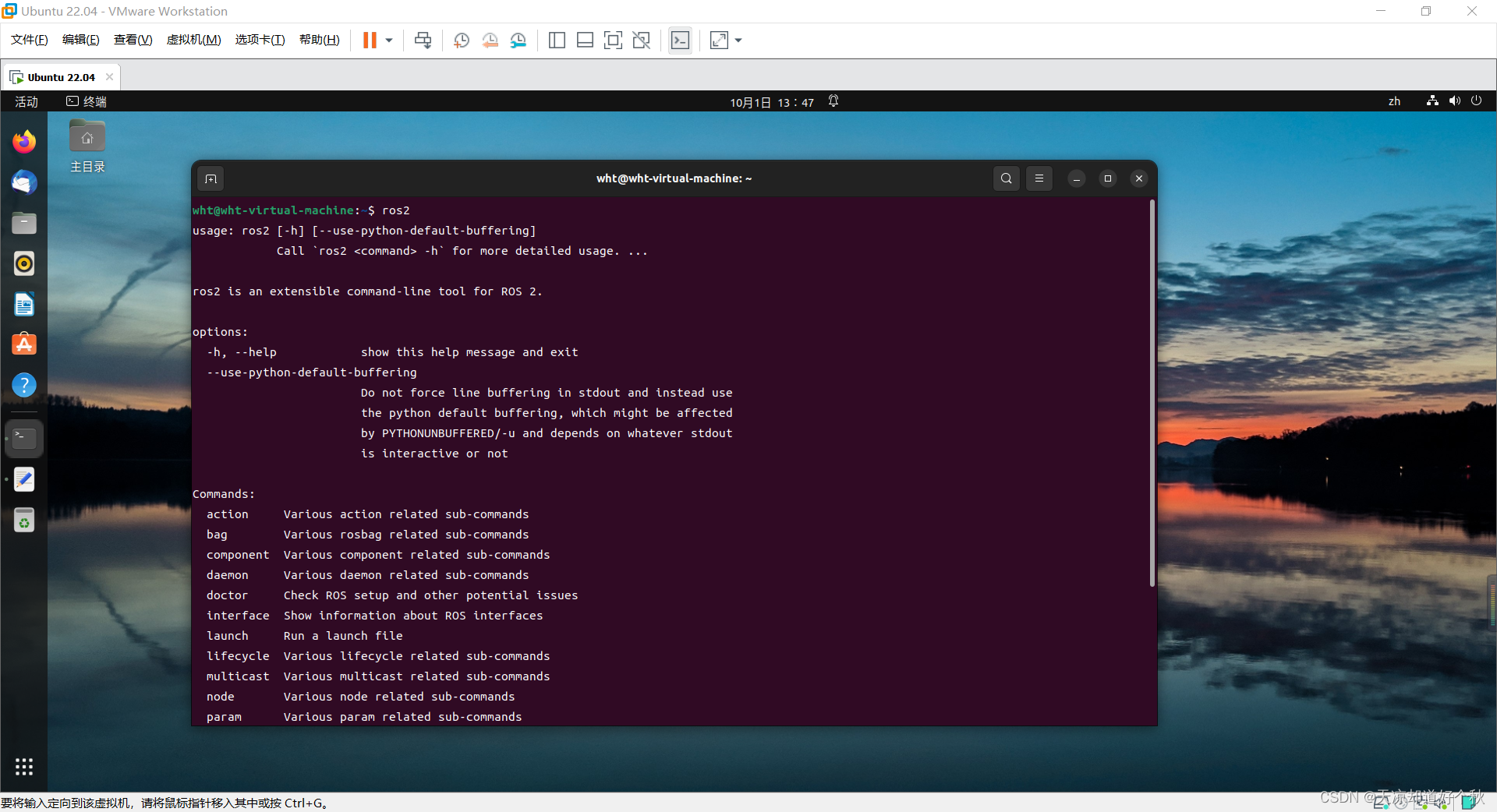
总结
跟着赵老师一步一步进行配置,遇到的两个问题也在老师的讲解下完美解决!
版权归原作者 不会是要长脑子了吧 所有, 如有侵权,请联系我们删除。