
最近在网上看到有与本博客一模一样的,连图片都一样。
特此声明:这是原版,转载请附原文链接,谢谢。
这次我将大部分图片添加了水印
文章目录
推荐下本人另一篇博客:
最新安装anaconda与tensorflow、pytorch(详细完整版)
一. 环境(不能含有中文路径)
本教程使用环境:
- pytorch: 1.10.0
- python: 3.9
- yolov5 v6.0
ps: 如果要使用GPU,cuda版本要 >=10.1
下载安装yolov5:
yolov5 v6.0官方要求 Python>=3.6 and PyTorch>=1.7
yolov5源码下载:https://github.com/ultralytics/yolov5
下载后,进入pytorch环境进入yolov5文件夹,使用换源的方法安装依赖。
如果你前面安装时没有换源,我强烈建议你使用换源的方法在安装一次
安装过的模块不会在安装,以防缺少模块,影响后续程序运行以及模型训练。
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
因为本教程主详细讲解训练自己的数据集,避免篇幅过多,因此这里不详细说明了。
二. 准备工作(文件夹及视频转图片)
因为这篇文章主要是给小白提供,所以数据集文件夹以及代码文件命名不是很标准,标准的自行去搜索查看coco数据集就行了。
为了排除一些意外情况,路径中就不要有短横杠-以及空格等等特殊字符。中文更不能要有。
- 在 yolov5目录下 新建文件夹 VOCData(可以自定义命名)
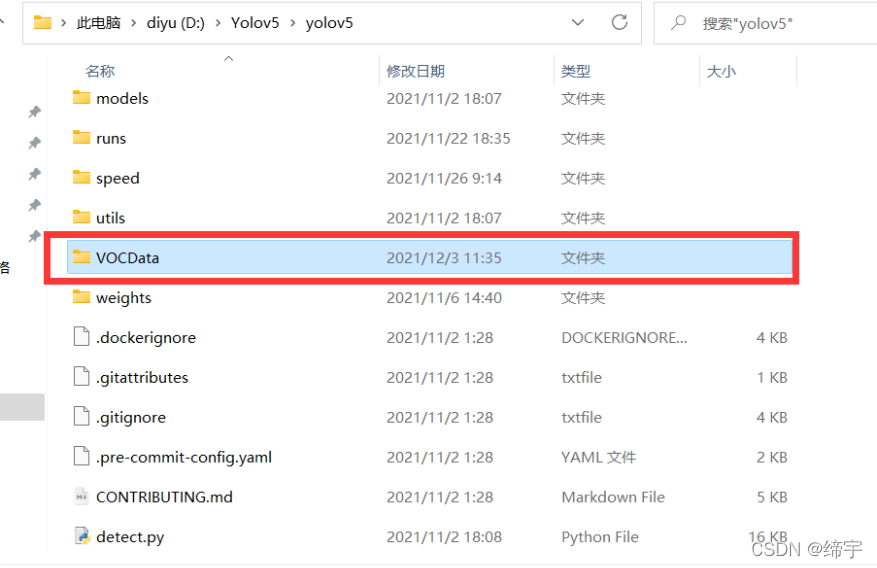
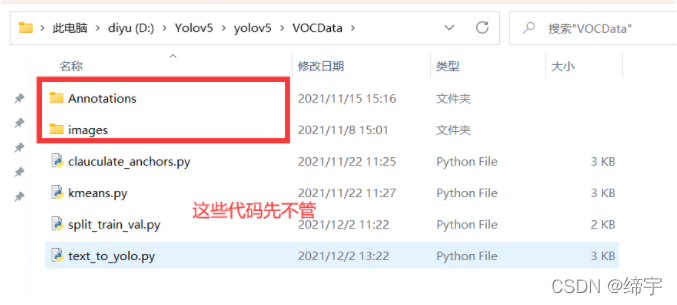
- 在VOCData下新建两个文件夹 Annotations 以及 images
images:用于存放要标注的图片(jpg格式)
这个和后续产生的 labels文件夹命名来源于yolov5/utils/datasets.py的第372行,你可进行查看。
Annotations :用于存放标注图片后产生的内容(这里采用XML格式)
后续使用代码保存位置如图
本教程需要用到图中的代码文件,这里先不用管,后面会给出代码。
这里提供本人编写的python代码,用于将视频转图片。
只需更改两个参数,视频路径以及间隔多少帧取图片。
python实现视频转图片_diyu-CSDN博客
代码运行,需要装有opencv模块,装opencv模块前需要装numpy模块。
所以,你可以选择进入pytorch环境进入代码所在文件夹,用命令行形式运行程序。
三. 使用labelImg标注图片
1. 安装labellmg
labelImg下载:https://github.com/tzutalin/labelImg
各种安装方法都在此链接中,这里只给出 windows +anaconda 进行安装。
ps: 如果你进入不了github,这里给出百度网盘链接
labellImg百度网盘链接:https://pan.baidu.com/s/1odKMu9nY6ueVJsiQwYRnkw
提取码:diyu
此labelImg是采用命令行形式运行,需要使用命令行安装一些依赖。
如果你认为这个太麻烦,网上有人打包好了此软件,可以自行去下载。
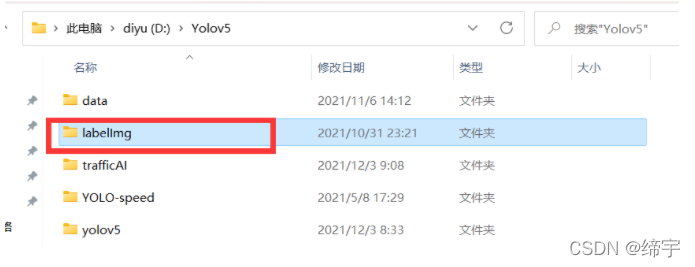
本人labellmg存放位置
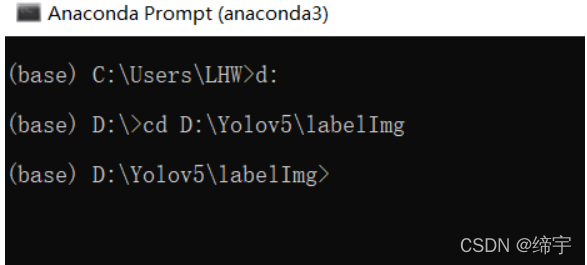
打开 anaconda prompt (类似于cmd)
进入 labellmg文件夹
我建议就在base环境下进行安装labellmg,方便一点,你也可以进入pytorch环境下安装。
在哪个环境安装的就在哪个环境下启动软件。
执行命令前,建议更新一下conda
conda update -n base -c defaults conda
-n:指定更新哪个环境的conda,这里是base环境
windows +anaconda 安装方式如下:
依次执行下面命令 (不要连接外网)
conda install pyqt=5
conda install -c anaconda lxml
pyrcc5 -o libs/resources.py resources.qrc
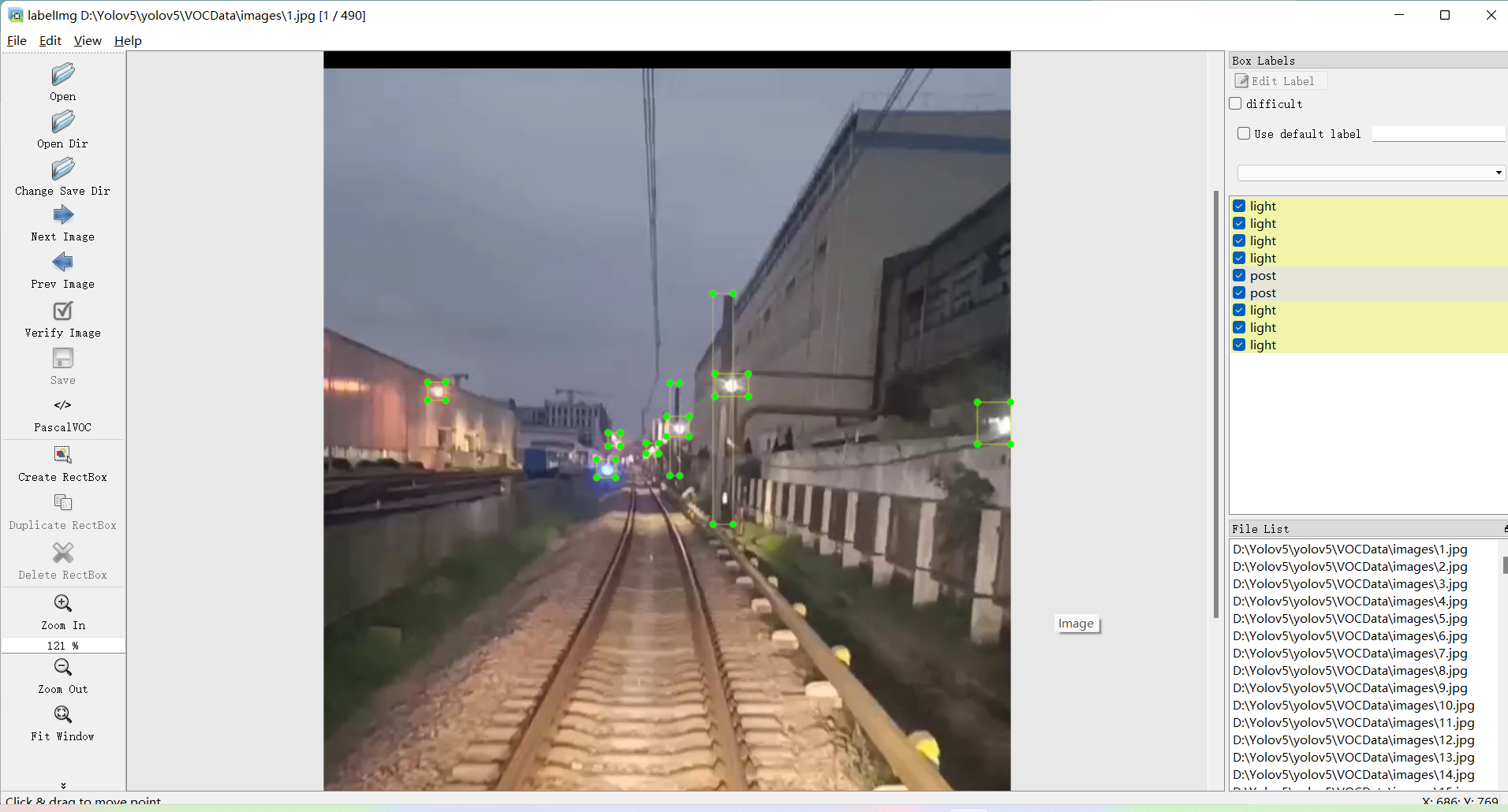
2. 使用labellmg
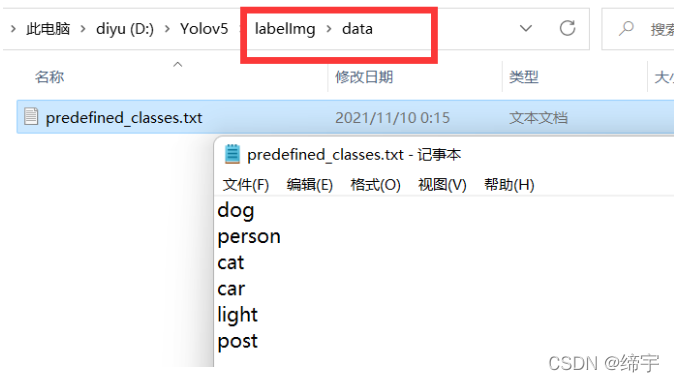
运行软件前可以更改下要标注的类别。
也可以进入软件后添加,不过那样每次进入软件都要添加,麻烦。
打开labellmg(要进入labellmg文件夹)
python labelImg.py #运行软件
勾选 auto save mode 自动保存
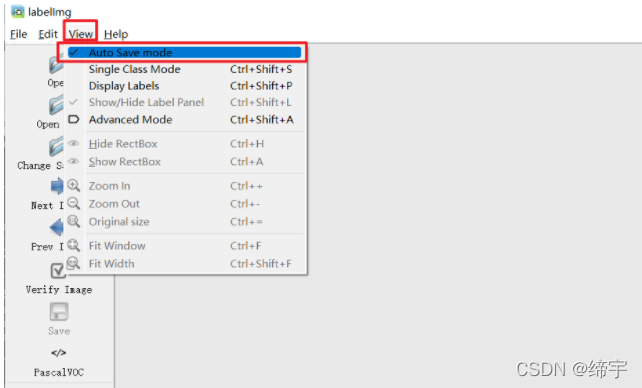
图片重新上传加了水印,模糊了见谅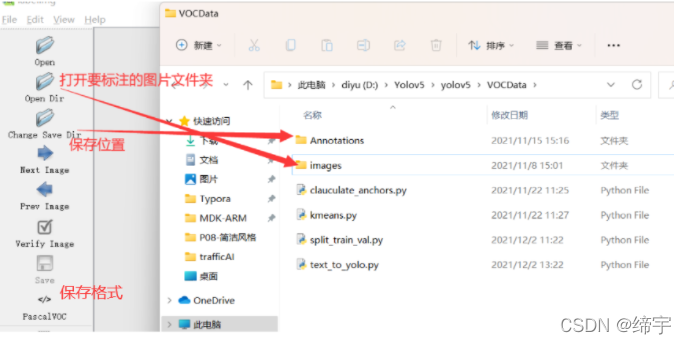
格式就默认是XML格式,可以更改成yolo,这里就使用默认的XML格式
点击左方边栏或者屏幕右键选择 Create RectBox 即可进行标注。
尽可能的完全拟合标注物体,建议放大标注,也别放大狠了哈。
其它看个人标准。
如果数据集很多的话,可以考虑自动标注,当然,也不是全自动哈。
四. 划分数据集以及配置文件修改
运行代码方式
- 第一种:使用pycharm、vscode、python自带的IDLE。如果出现缺少模块的情况(no module named),你可以安装模块,也可以使用后一种方法。
- 第二种:进入pytorch环境,进入代码所在目录,使用命令行形式运行(python + 程序名)
1. 划分训练集、验证集、测试集
在VOCData目录下创建程序
split_train_val.py
并运行
程序如下:(可以不更改)
# coding:utf-8import os
import random
import argparse
parser = argparse.ArgumentParser()#xml文件的地址,根据自己的数据进行修改 xml一般存放在Annotations下
parser.add_argument('--xml_path', default='Annotations',type=str,help='input xml label path')#数据集的划分,地址选择自己数据下的ImageSets/Main
parser.add_argument('--txt_path', default='ImageSets/Main',type=str,help='output txt label path')
opt = parser.parse_args()
trainval_percent =1.0# 训练集和验证集所占比例。 这里没有划分测试集
train_percent =0.9# 训练集所占比例,可自己进行调整
xmlfilepath = opt.xml_path
txtsavepath = opt.txt_path
total_xml = os.listdir(xmlfilepath)ifnot os.path.exists(txtsavepath):
os.makedirs(txtsavepath)
num =len(total_xml)
list_index =range(num)
tv =int(num * trainval_percent)
tr =int(tv * train_percent)
trainval = random.sample(list_index, tv)
train = random.sample(trainval, tr)
file_trainval =open(txtsavepath +'/trainval.txt','w')
file_test =open(txtsavepath +'/test.txt','w')
file_train =open(txtsavepath +'/train.txt','w')
file_val =open(txtsavepath +'/val.txt','w')for i in list_index:
name = total_xml[i][:-4]+'\n'if i in trainval:
file_trainval.write(name)if i in train:
file_train.write(name)else:
file_val.write(name)else:
file_test.write(name)
file_trainval.close()
file_train.close()
file_val.close()
file_test.close()
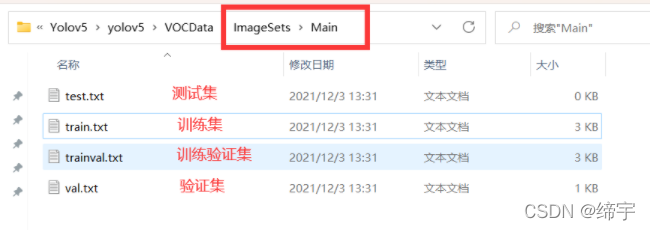
运行完毕后 会生成 ImagesSets\Main 文件夹,且在其下生成 测试集、训练集、验证集,存放图片的名字(无后缀.jpg)
由于没有分配测试集,所以测试集为空。
若要分配,更改第 14、15 行代码,更改所在比例即可。
2. XML格式转yolo_txt格式
在VOCData目录下创建程序
text_to_yolo.py
并运行
命名随意,我后面改成了 xml_to_yolo.py,更加的贴切。
程序如下:
需要将第 7 行改成自己所标注的类别 以及修改各绝对路径
绝对路径需为:d:\images 或者 d:/images
双右斜线或者单左斜线
# -*- coding: utf-8 -*-import xml.etree.ElementTree as ET
import os
from os import getcwd
sets =['train','val','test']
classes =["light","post"]# 改成自己的类别
abs_path = os.getcwd()print(abs_path)defconvert(size, box):
dw =1./(size[0])
dh =1./(size[1])
x =(box[0]+ box[1])/2.0-1
y =(box[2]+ box[3])/2.0-1
w = box[1]- box[0]
h = box[3]- box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return x, y, w, h
defconvert_annotation(image_id):
in_file =open('D:/Yolov5/yolov5/VOCData/Annotations/%s.xml'%(image_id), encoding='UTF-8')
out_file =open('D:/Yolov5/yolov5/VOCData/labels/%s.txt'%(image_id),'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w =int(size.find('width').text)
h =int(size.find('height').text)for obj in root.iter('object'):
difficult = obj.find('difficult').text
#difficult = obj.find('Difficult').text
cls = obj.find('name').text
if cls notin classes orint(difficult)==1:continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b =(float(xmlbox.find('xmin').text),float(xmlbox.find('xmax').text),float(xmlbox.find('ymin').text),float(xmlbox.find('ymax').text))
b1, b2, b3, b4 = b
# 标注越界修正if b2 > w:
b2 = w
if b4 > h:
b4 = h
b =(b1, b2, b3, b4)
bb = convert((w, h), b)
out_file.write(str(cls_id)+" "+" ".join([str(a)for a in bb])+'\n')
wd = getcwd()for image_set in sets:ifnot os.path.exists('D:/Yolov5/yolov5/VOCData/labels/'):
os.makedirs('D:/Yolov5/yolov5/VOCData/labels/')
image_ids =open('D:/Yolov5/yolov5/VOCData/ImageSets/Main/%s.txt'%(image_set)).read().strip().split()ifnot os.path.exists('D:/Yolov5/yolov5/VOCData/dataSet_path/'):
os.makedirs('D:/Yolov5/yolov5/VOCData/dataSet_path/')
list_file =open('dataSet_path/%s.txt'%(image_set),'w')# 这行路径不需更改,这是相对路径for image_id in image_ids:
list_file.write('D:/Yolov5/yolov5/VOCData/images/%s.jpg\n'%(image_id))
convert_annotation(image_id)
list_file.close()
运行后会生成如下 labels 文件夹和 dataSet_path 文件夹。
其中 labels 中为不同图像的标注文件。每个图像对应一个txt文件,文件每一行为一个目标的信息,包括class, x_center, y_center, width, height格式,这种即为 yolo_txt格式
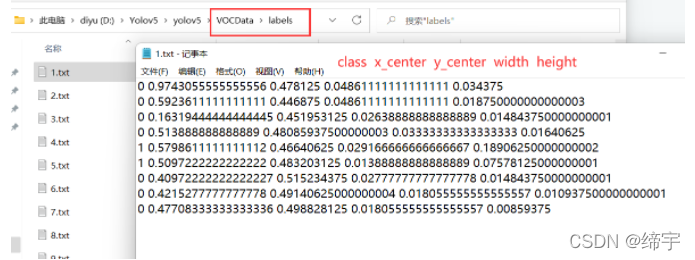
dataSet_path文件夹包含三个数据集的txt文件,train.txt等txt文件为划分后图像所在位置的路径,如train.txt就含有所有训练集图像的路径。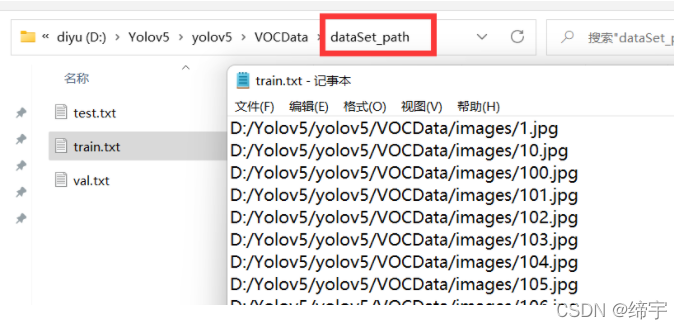
3. 配置文件
在 yolov5 目录下的 data 文件夹下 新建一个 myvoc.yaml文件(可以自定义命名),用记事本打开。
内容是:
训练集以及验证集(train.txt和val.txt)的路径(可以改为相对路径)
以及 目标的类别数目和类别名称。
注意这里的类别名称顺序,如果训练的结果是反的,这里修改重新训练。
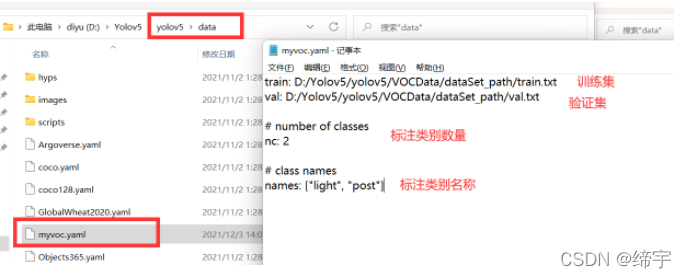
给出模板: 冒号后面需要加空格
train: D:/Yolov5/yolov5/VOCData/dataSet_path/train.txt
val: D:/Yolov5/yolov5/VOCData/dataSet_path/val.txt
# number of classes
nc:2# class names
names:["light","post"]
3. 聚类获得先验框
3.1 生成anchors(两种方法)
有自动法以及手动法。
鉴于很多人在生成anchors文件这里出错,因此补上自动法
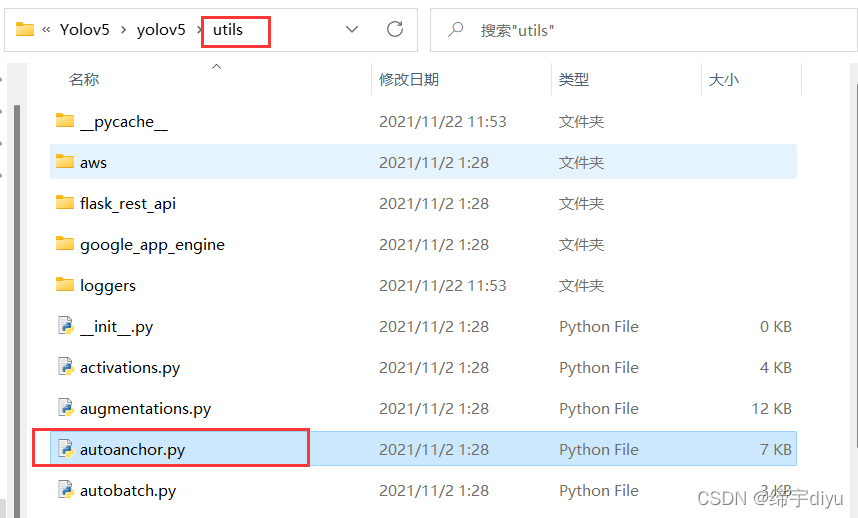
3.1.1 自动获取anchors
如果目录 yolov5/utils下有 autoanchor.py文件,那么就可以采用自动获取anchors。(yolov5版本偏低是没有的)
如果没有此文件。那么就只能手动获取更改anchors
确保 yolov5/data/hyps/hyp.cratch.yaml中的anchors这行是注释掉的。
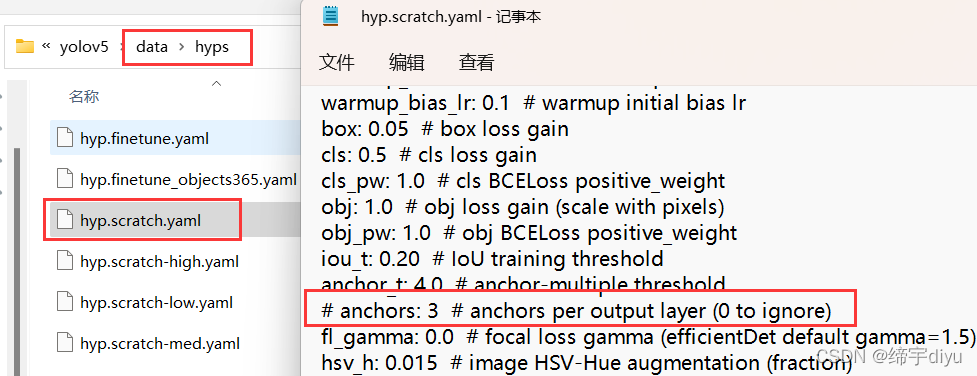
采用自动法的话,不用运行,训练时自动调用
如果自动获取anchors的话,训练时只要不添加参数 --noautoanchor(后面会介绍),就会自动运行autoanchor.py。
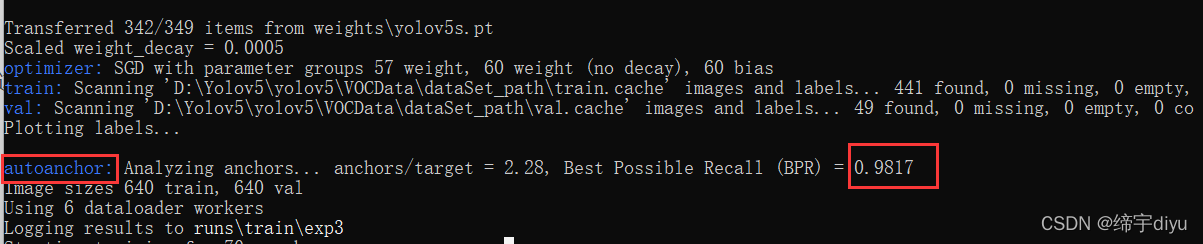
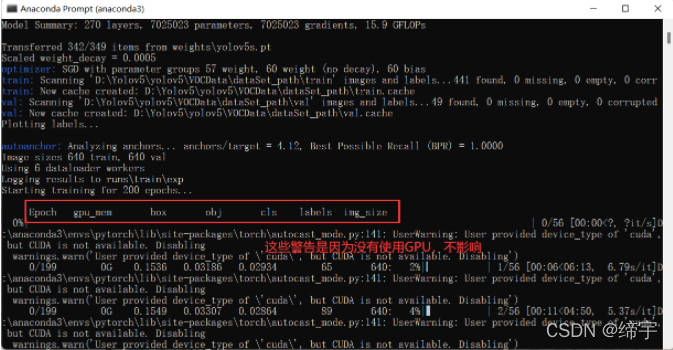
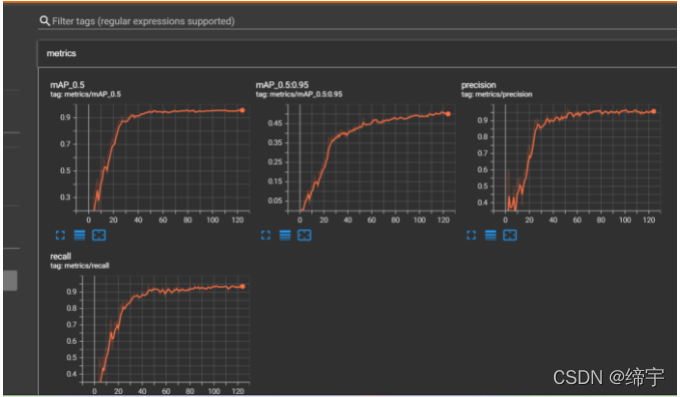
原理就是通过检测计算 Best Possible Recall (BPR),来判断是否重新计算anchors。如果BPR<0.98时(最高是1),会自动通过k-means(欧式距离)聚类得到新的anchors。
图中大于0.98,所以没有更新anchors。
我这里不清楚 BPR<0.98的具体情况,我只知道会重新计算anchors,但是是否需要我们将重新生成的anchors像手动法那样去修改anchors就不清楚了。
按理应该是不需要的,如果训练时重新生成anchors后会停止训练,那么应该是需要我们修改ahchors。
3.1.2 手动获取anchors
在VOCData目录下创建程序两个程序
kmeans.py
以及
clauculate_anchors.py
不需要运行 kmeans.py,运行 clauculate_anchors.py 即可。
kmeans.py 程序如下:这不需要运行,也不需要更改
如果报错,可以查看第 13 行内容
import numpy as np
defiou(box, clusters):"""
Calculates the Intersection over Union (IoU) between a box and k clusters.
:param box: tuple or array, shifted to the origin (i. e. width and height)
:param clusters: numpy array of shape (k, 2) where k is the number of clusters
:return: numpy array of shape (k, 0) where k is the number of clusters
"""
x = np.minimum(clusters[:,0], box[0])
y = np.minimum(clusters[:,1], box[1])if np.count_nonzero(x ==0)>0or np.count_nonzero(y ==0)>0:raise ValueError("Box has no area")# 如果报这个错,可以把这行改成pass即可
intersection = x * y
box_area = box[0]* box[1]
cluster_area = clusters[:,0]* clusters[:,1]
iou_ = intersection /(box_area + cluster_area - intersection)return iou_
defavg_iou(boxes, clusters):"""
Calculates the average Intersection over Union (IoU) between a numpy array of boxes and k clusters.
:param boxes: numpy array of shape (r, 2), where r is the number of rows
:param clusters: numpy array of shape (k, 2) where k is the number of clusters
:return: average IoU as a single float
"""return np.mean([np.max(iou(boxes[i], clusters))for i inrange(boxes.shape[0])])deftranslate_boxes(boxes):"""
Translates all the boxes to the origin.
:param boxes: numpy array of shape (r, 4)
:return: numpy array of shape (r, 2)
"""
new_boxes = boxes.copy()for row inrange(new_boxes.shape[0]):
new_boxes[row][2]= np.abs(new_boxes[row][2]- new_boxes[row][0])
new_boxes[row][3]= np.abs(new_boxes[row][3]- new_boxes[row][1])return np.delete(new_boxes,[0,1], axis=1)defkmeans(boxes, k, dist=np.median):"""
Calculates k-means clustering with the Intersection over Union (IoU) metric.
:param boxes: numpy array of shape (r, 2), where r is the number of rows
:param k: number of clusters
:param dist: distance function
:return: numpy array of shape (k, 2)
"""
rows = boxes.shape[0]
distances = np.empty((rows, k))
last_clusters = np.zeros((rows,))
np.random.seed()# the Forgy method will fail if the whole array contains the same rows
clusters = boxes[np.random.choice(rows, k, replace=False)]whileTrue:for row inrange(rows):
distances[row]=1- iou(boxes[row], clusters)
nearest_clusters = np.argmin(distances, axis=1)if(last_clusters == nearest_clusters).all():breakfor cluster inrange(k):
clusters[cluster]= dist(boxes[nearest_clusters == cluster], axis=0)
last_clusters = nearest_clusters
return clusters
if __name__ =='__main__':
a = np.array([[1,2,3,4],[5,7,6,8]])print(translate_boxes(a))
运行:
clauculate_anchors.py
会调用 kmeans.py 聚类生成新anchors的文件
程序如下:
需要更改第 9 、13行文件绝对路径 以及 第 16 行标注类别名称
# -*- coding: utf-8 -*-# 根据标签文件求先验框import os
import numpy as np
import xml.etree.cElementTree as et
from kmeans import kmeans, avg_iou
FILE_ROOT ="D:/Yolov5/yolov5/VOCData/"# 根路径
ANNOTATION_ROOT ="Annotations"# 数据集标签文件夹路径
ANNOTATION_PATH = FILE_ROOT + ANNOTATION_ROOT
ANCHORS_TXT_PATH ="D:/Yolov5/yolov5/VOCData/anchors.txt"#anchors文件保存位置
CLUSTERS =9
CLASS_NAMES =['light','post']#类别名称defload_data(anno_dir, class_names):
xml_names = os.listdir(anno_dir)
boxes =[]for xml_name in xml_names:
xml_pth = os.path.join(anno_dir, xml_name)
tree = et.parse(xml_pth)
width =float(tree.findtext("./size/width"))
height =float(tree.findtext("./size/height"))for obj in tree.findall("./object"):
cls_name = obj.findtext("name")if cls_name in class_names:
xmin =float(obj.findtext("bndbox/xmin"))/ width
ymin =float(obj.findtext("bndbox/ymin"))/ height
xmax =float(obj.findtext("bndbox/xmax"))/ width
ymax =float(obj.findtext("bndbox/ymax"))/ height
box =[xmax - xmin, ymax - ymin]
boxes.append(box)else:continuereturn np.array(boxes)if __name__ =='__main__':
anchors_txt =open(ANCHORS_TXT_PATH,"w")
train_boxes = load_data(ANNOTATION_PATH, CLASS_NAMES)
count =1
best_accuracy =0
best_anchors =[]
best_ratios =[]for i inrange(10):##### 可以修改,不要太大,否则时间很长
anchors_tmp =[]
clusters = kmeans(train_boxes, k=CLUSTERS)
idx = clusters[:,0].argsort()
clusters = clusters[idx]# print(clusters)for j inrange(CLUSTERS):
anchor =[round(clusters[j][0]*640,2),round(clusters[j][1]*640,2)]
anchors_tmp.append(anchor)print(f"Anchors:{anchor}")
temp_accuracy = avg_iou(train_boxes, clusters)*100print("Train_Accuracy:{:.2f}%".format(temp_accuracy))
ratios = np.around(clusters[:,0]/ clusters[:,1], decimals=2).tolist()
ratios.sort()print("Ratios:{}".format(ratios))print(20*"*"+" {} ".format(count)+20*"*")
count +=1if temp_accuracy > best_accuracy:
best_accuracy = temp_accuracy
best_anchors = anchors_tmp
best_ratios = ratios
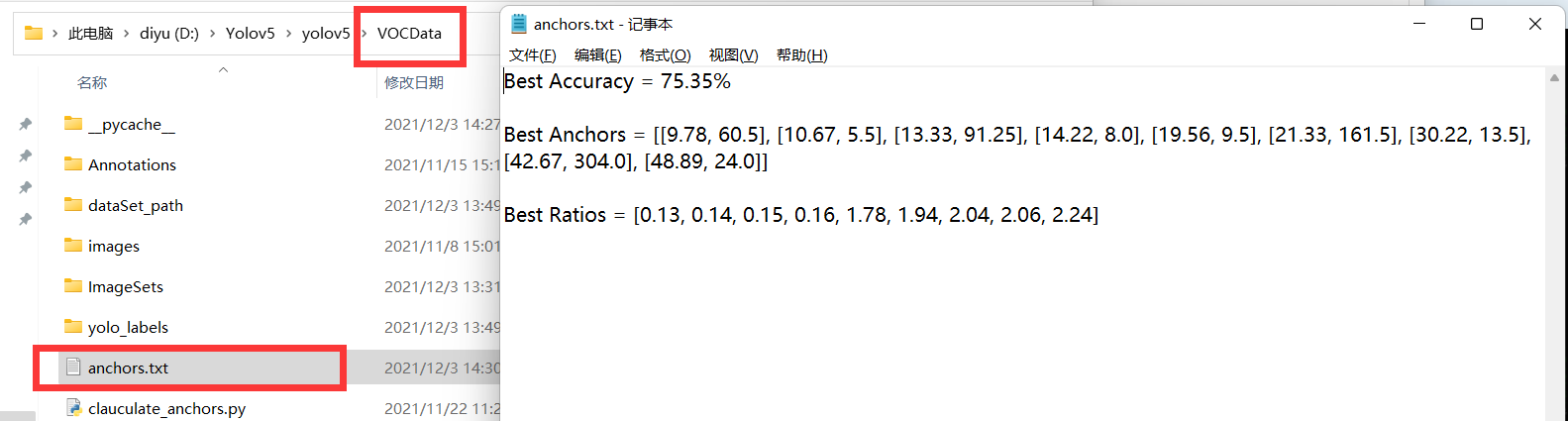
anchors_txt.write("Best Accuracy = "+str(round(best_accuracy,2))+'%'+"\r\n")
anchors_txt.write("Best Anchors = "+str(best_anchors)+"\r\n")
anchors_txt.write("Best Ratios = "+str(best_ratios))
anchors_txt.close()
会生成anchors文件。如果生成文件为空,重新运行即可。
如果还是为空,看下是不是类别没有更改。
第二行 Best Anchors 后面需要用到。(这就是手动获取到的anchors的值)
3.2 修改模型配置文件
选择一个模型,在yolov5目录下的model文件夹下是模型的配置文件,有n、s、m、l、x版本,逐渐增大(随着架构的增大,训练时间也是逐渐增大)。
这里放一些官方数据:GitHub - ultralytics/yolov5
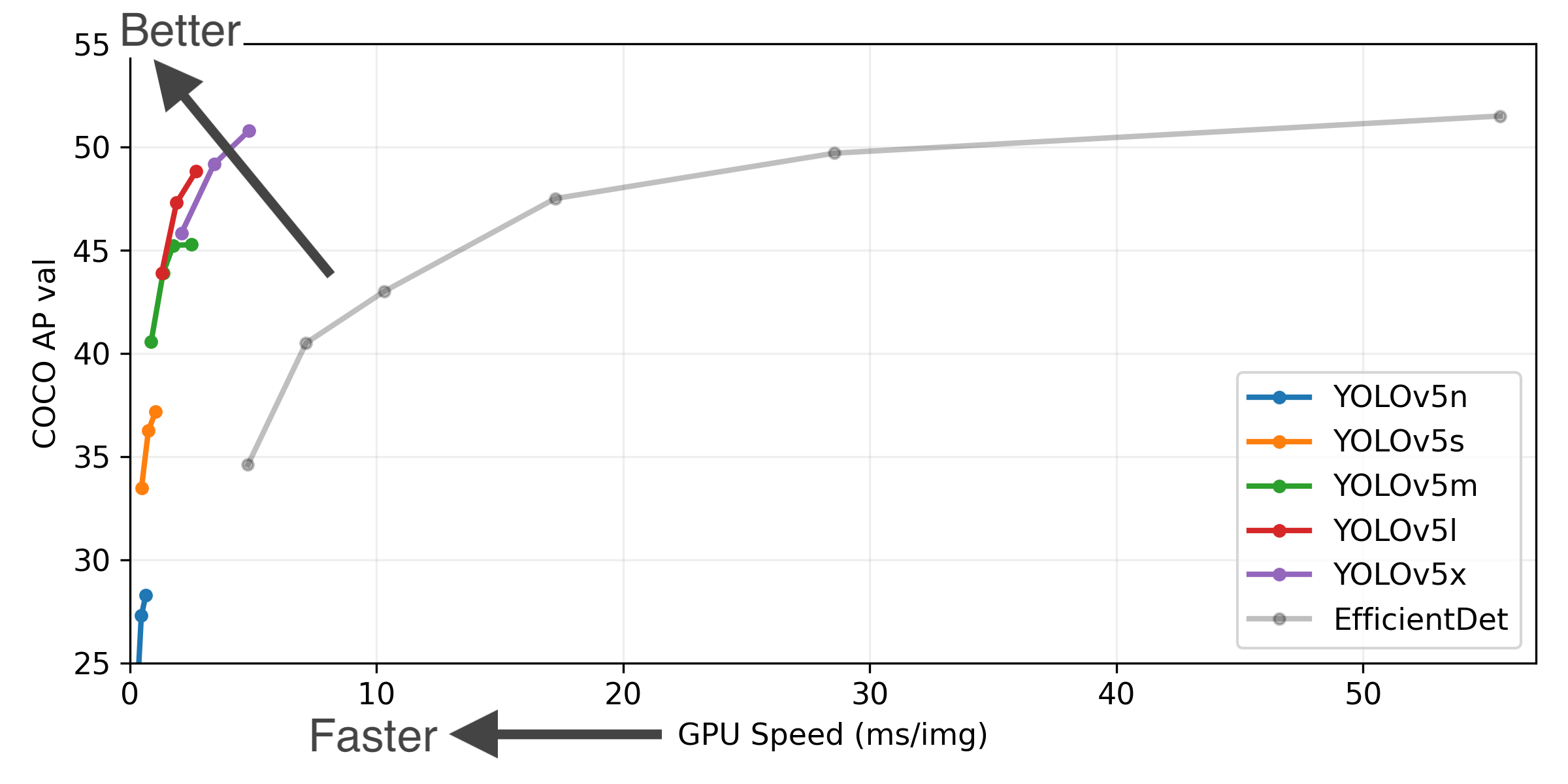
Modelsize (pixels)mAPval 0.5:0.95mAPval 0.5Speed CPU b1 (ms)Speed V100 b1 (ms)Speed V100 b32 (ms)params (M)FLOPs @640 (B)YOLOv5n64028.446.0456.30.61.94.5YOLOv5s64037.256.0986.40.97.216.5YOLOv5m64045.263.92248.21.721.249.0YOLOv5l64048.867.243010.12.746.5109.1YOLOv5x64050.768.976612.14.886.7205.7
这里选用 yolov5s.yaml
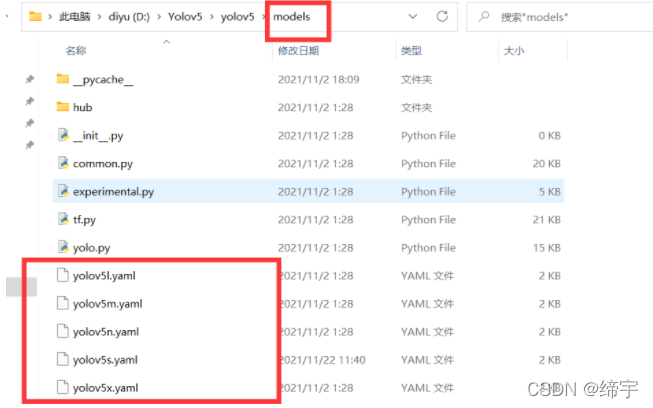
使用记事本打开 yolov5s.yaml。
修改参数。
- 采用自动法获取anchors,只需更改nc 标注类别数,不用更改anchors
按理应该是不需修改anchors的,我在前面自动法那里提过,如果后续训练时自动计算出了anchors后暂停了训练,那么应该是需要我们根据生成的anchors来修改。
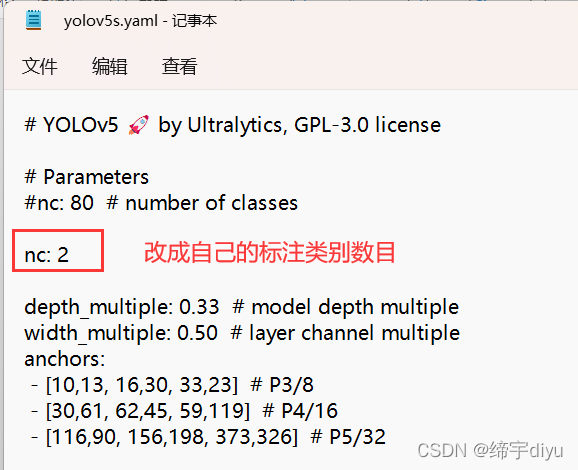
- 手动法获取anchors需要更改两个参数
把 nc 改成自己的标注类别数
修改anchors,根据 anchors.txt 中的 Best Anchors 修改,需要取整(四舍五入、向上、向下都可以)。
保持yaml中的anchors格式不变,按顺序一对一即可。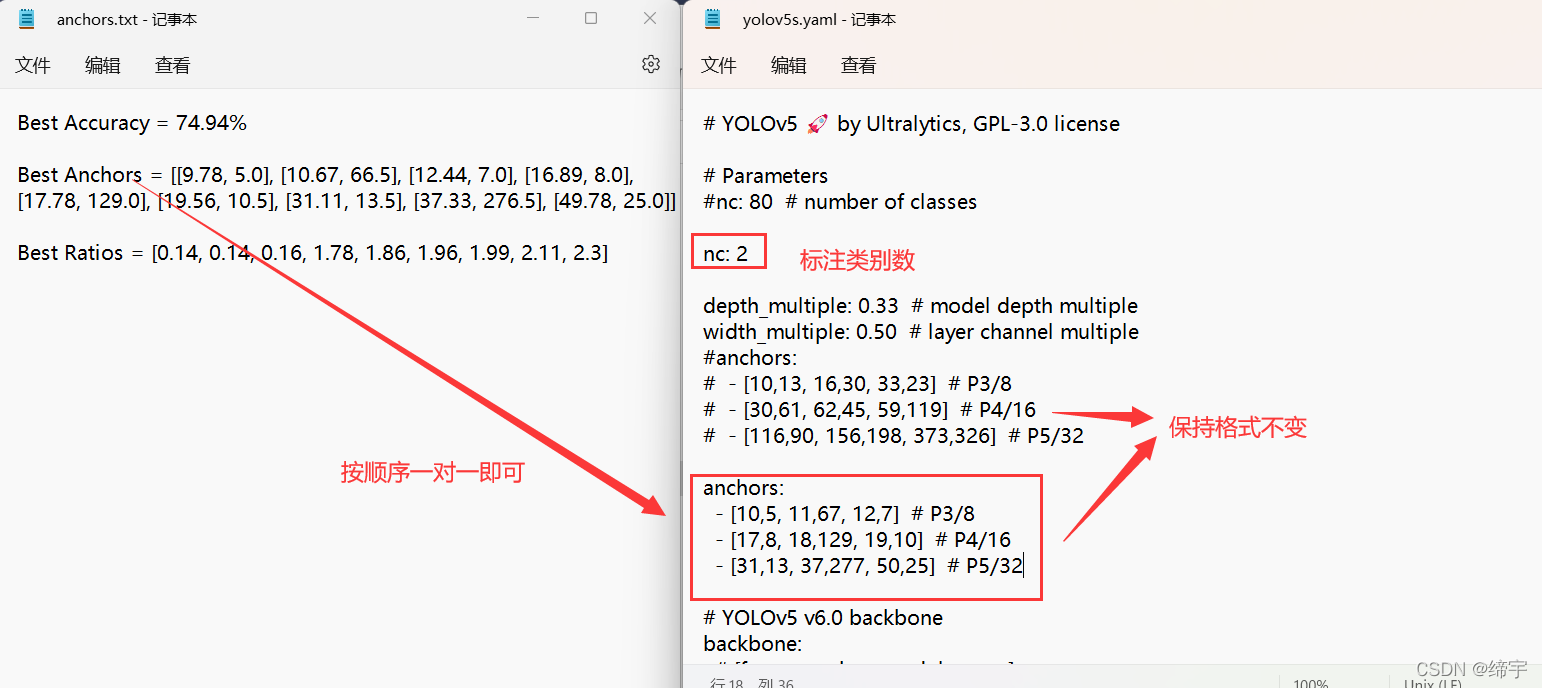
五. 模型训练
1. 开始训练
打开yolov5 目录下的 train.py 程序,我们可以多看看这些参数使用。
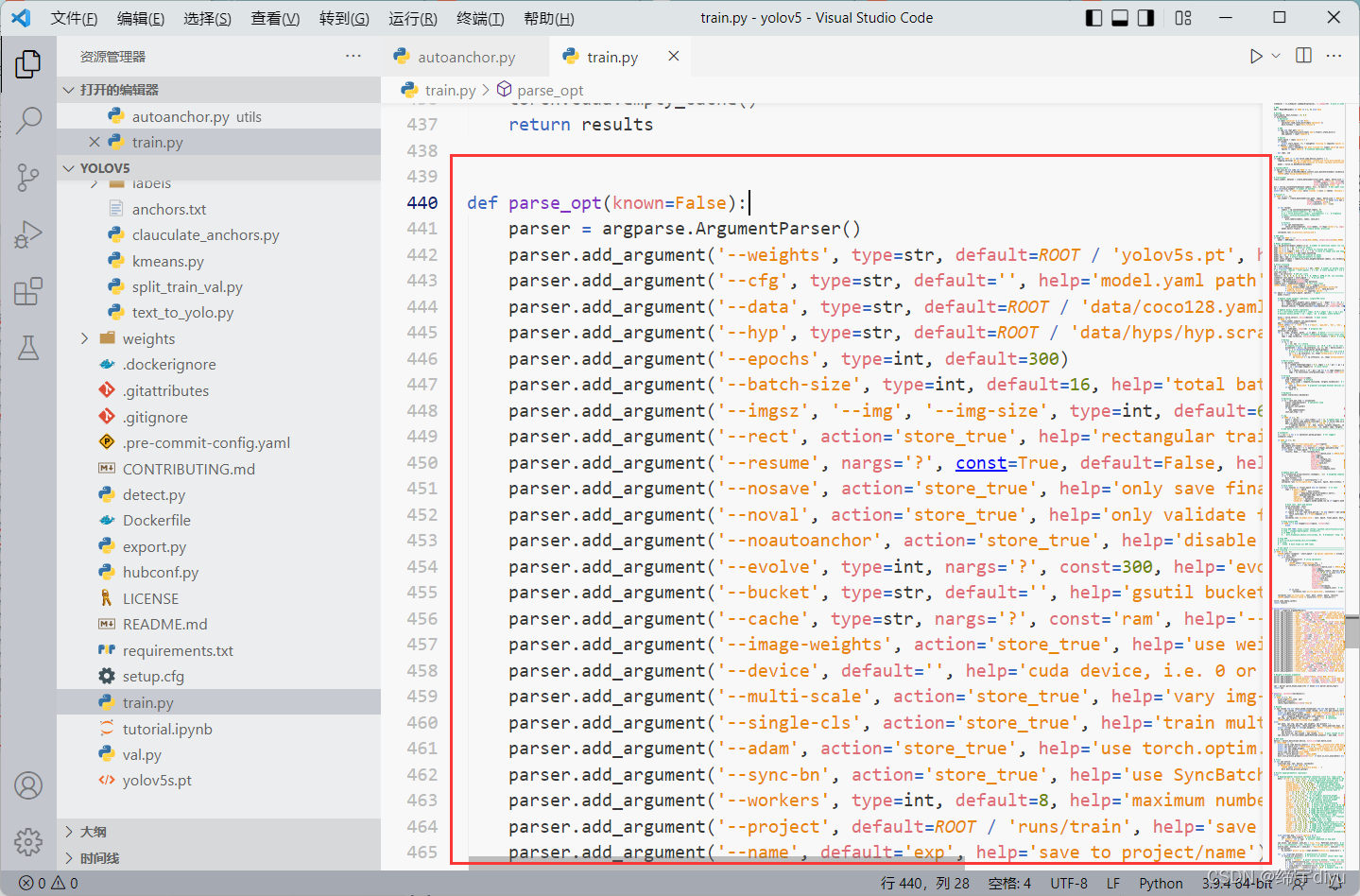
常用参数解释如下:
这个大部分借鉴了参考链接。
weights:权重文件路径
cfg:存储模型结构的配置文件
data:存储训练、测试数据的文件
epochs:指的就是训练过程中整个数据集将被迭代(训练)了多少次,显卡不行你就调小点。
batch-size:训练完多少张图片才进行权重更新,显卡不行就调小点。
img-size:输入图片宽高,显卡不行就调小点。
device:cuda device, i.e. 0 or 0,1,2,3 or cpu。选择使用GPU还是CPU
workers:线程数。默认是8。
其它参数解释:
noautoanchor:不自动检验更新anchors
rect:进行矩形训练resume:恢复最近保存的模型开始训练
nosave:仅保存最终checkpoint
notest:仅测试最后的epoch
evolve:进化超参数
bucket:gsutil bucket
cache-images:缓存图像以加快训练速度
name: 重命名results.txt to results_name.txt
adam:使用adam优化
multi-scale:多尺度训练,img-size +/- 50%
single-cls:单类别的训练集
进入pytorch环境,进入yolov5文件夹
训练命令如下:
如果出现问题,查看后面问题说明!
python train.py --weights weights/yolov5s.pt --cfg models/yolov5s.yaml --data data/myvoc.yaml --epoch 200--batch-size 8--img 640--device cpu
–weights weights/yolov5s.pt :这个也许你需要更改路径。我是将yolov5的pt文件都放在weights目录下,你可能没有,需要更改路径。
–epoch 200 :训练200次
–batch-size 8:训练8张图片后进行权重更新
–device cpu:使用CPU训练。
如果采用手动法获取anchors,可以选择补充添加参数 --noautoanchor,也可以不添加(解释如下)
参数解释在上面。如果是自动法,这个参数不要加;
如果是手动获取并更改了anchors的,而且没有添加参数 --noautoanchor,训练时会计算BPR,并且得到的BPR应该是为1的(或者极为接近1),所以不会更新anchors。因此,手动法的话这个参数添不添加无所谓的。
2. 训练过程
如果你不想看到这些警告,网上是有办法消除的,自行寻找了。
如果你使用GPU训练也有类似下面这个,那是你 cuda 版本不对(不是>=10.1的版本),版本不对无法使用cuda。
训练好的模型会被保存在 yolov5 目录下的 runs/train/weights/ 下
3. 训练时间
- 我这里四百多张图片,使用CPU训练了一百二十几次(虽然设的200次,但我中途终止了),大概花了5、6个小时吧,时间比较久了忘了。
- 我同学 70张图片训练70次,使用CPU训练花了 一个多小时。
上述时间只限于电脑风扇转动的情况下,如果你电脑限制性能,风扇不转动,那时间将会是个未知(一般是好几倍)
4. 相关问题
如果出现缺少模块的情况(no module named)
回到博客最开始部分,使用换源的方法补充安装yolov5的依赖。
如果出现 (页面太小,无法完成操作)的相关问题
那是虚拟内存不足,重新打开页面或者重启电脑试试(这个方法解决的可能性比较低),降低线程 --workes (默认是8) 。最后再试试调小 --batch-size,降低 --epoch
我有几个同学 --workers指定为0才成功。
如果都不行,可以看看这个链接 https://product.pconline.com.cn/itbk/software/dnyw/1707/9679137.html
如果训练过程中出现 memory error
那是内存超了,减小 --batch-size 试试,如果还不行降低 --epoch。
我同学将 --epoch 设为100次,–batch-size设为3才成功。
–epoch建议尽量在100次往上吧
重复训练的话,你也许需要将这两个缓存清除掉。
5. 训练可视化
训练时或者训练后可以利用 tensorboard 查看训练可视化
tensorboard --logdir=runs
与训练一样,进入pytorch环境,进入yolov5文件夹执行。

六. 检测效果
python detect.py --source 0# webcam 自带摄像头file.jpg # image 图片file.mp4 # video 视频
path/# directory
path/*.jpg # glob'https://youtu.be/NUsoVlDFqZg'# YouTube'rtsp://example.com/media.mp4'# RTSP, RTMP, HTTP stream
我们使用刚刚训练出的最好的模型 best.pt 来测试,在yolov5目录下的 runs/train/exp/weights 。
python detect.py --weights runs/train/exp/weights/best.pt --source ../data/video/tram.mp4
../
代表当前目录的上一级目录
测试结果保存在 yolov5/runs/detect 目录下
七. 模型评估与推理
这个就请查看第一个参考链接了,我就不说明了,注意下版本问题哈
八. 参考链接(感谢)
- YOLOv5训练自己的数据集(超详细完整版)_深度学习菜鸟的博客-CSDN博客_yolov5训练自己的数据
- 【小白CV】手把手教你用YOLOv5训练自己的数据集(从Windows环境配置到模型部署) (icode9.com)
有帮助的话,不求一键三连,点个赞还是可以的吧,笔芯
这些问题都是在我朋友身上遇到的,各种纷杂问题都有,这里只保留了部分问题。
版权归原作者 缔宇diyu 所有, 如有侵权,请联系我们删除。