
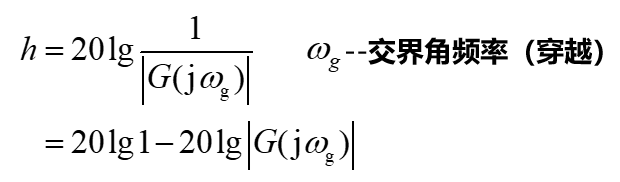
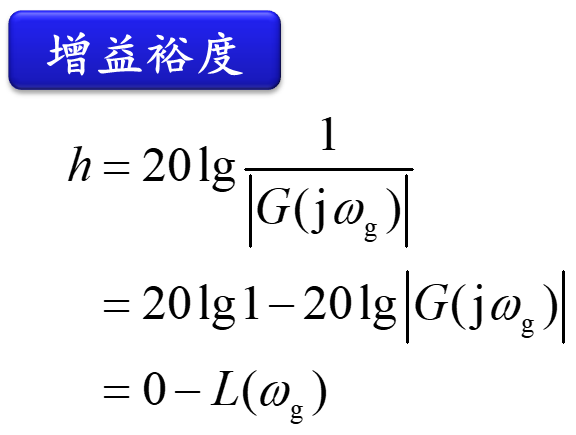
一、增益裕度h(幅值裕度, gain margin****)
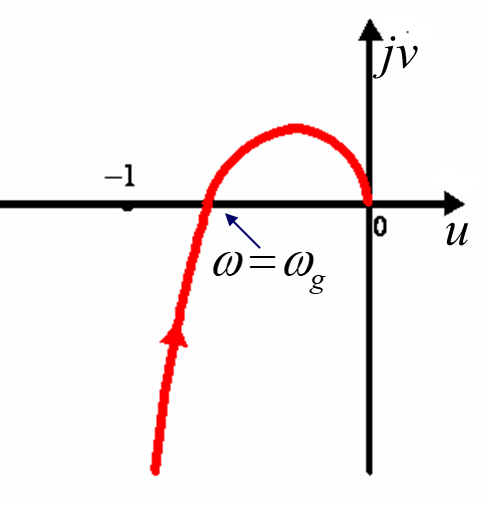
开环幅相特性曲线(奈氏曲线)G(jw)与负实轴相交时,其以dB表示的增益倒数。【G(jw)距-1点的“距离”****】
h**>**0 **时,系统闭环稳定; **
h**=**0 时,系统闭环临界稳定;
h**<**0 **时,系统闭环不稳定。 **
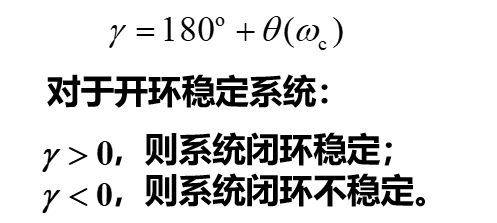
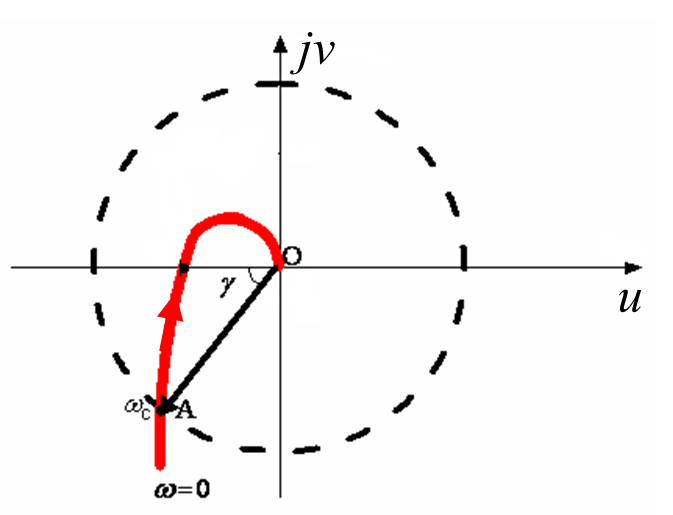
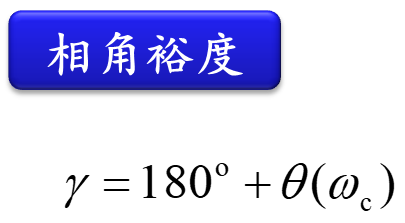
二、相角裕度*g ***(phase margin)**
使幅相特性曲线的增益交界点穿过**-1****点,必须绕原点顺时针旋转的角度。 **
工程上一般取相角裕度为30~60度,增益裕度大于6dB。
①***对于最小相位系统,h***>0和g >0 是同时满足或同时不满足的,所以可只用其一表示系统的稳定裕度,常用相角裕度g。
②对于开环不稳定的系统不能用增益裕度和相角裕度来判断系统的稳定性。
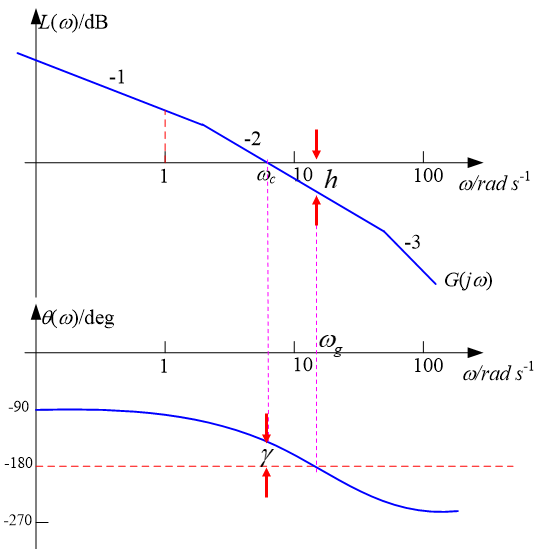
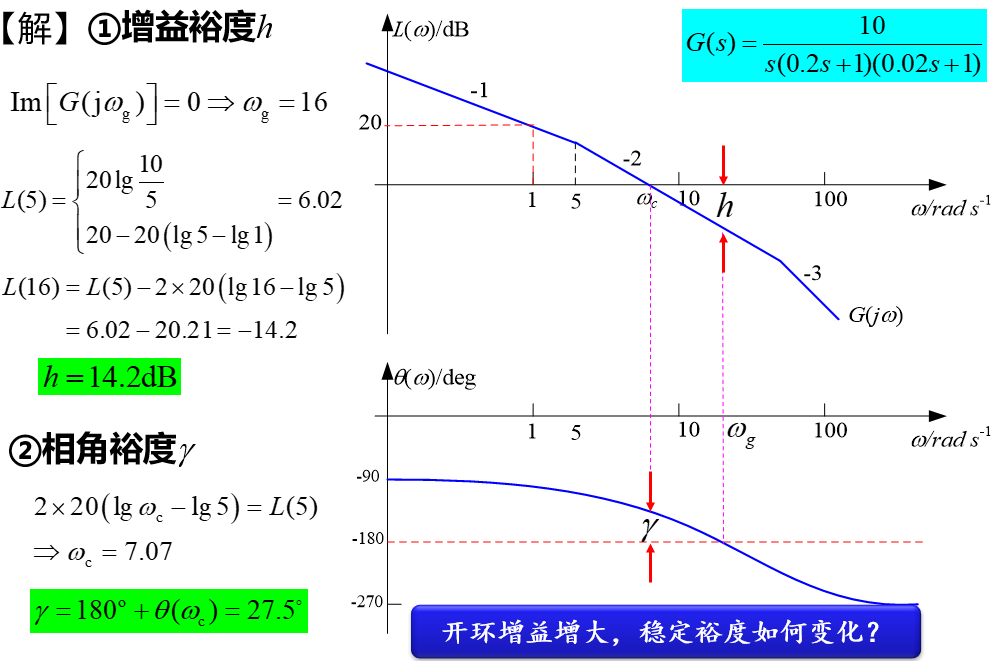
三、根据Bode图确定稳定裕度 相角裕度
 裕度
裕度

本文转载自: https://blog.csdn.net/weixin_50932441/article/details/130552959
版权归原作者 Vizio< 所有, 如有侵权,请联系我们删除。
版权归原作者 Vizio< 所有, 如有侵权,请联系我们删除。