
FX5U+JET(Basic)FB****功能块一览
FB功能块请私聊我分享!!!!!
一、功能
MR-JET-G伺服放大器根据CiA 402驱动器轨迹的Index来分配对象。FX5U PLC通过CCLINK IE Field Basic网络访问被分配的对象,可以驱动伺服电机。
样例FB块可实现轨迹速度、轨迹位置、原点回归以及一些暂停、急停、复位、状态监视、报警输出等控制。
二****、JET伺服参数设定
1****、基本参数(以下参数必须设置)
- PN13.0-3 选择CC-LINK IE 现场网络Basic

- PN22默认映射模式选择设0000 0001


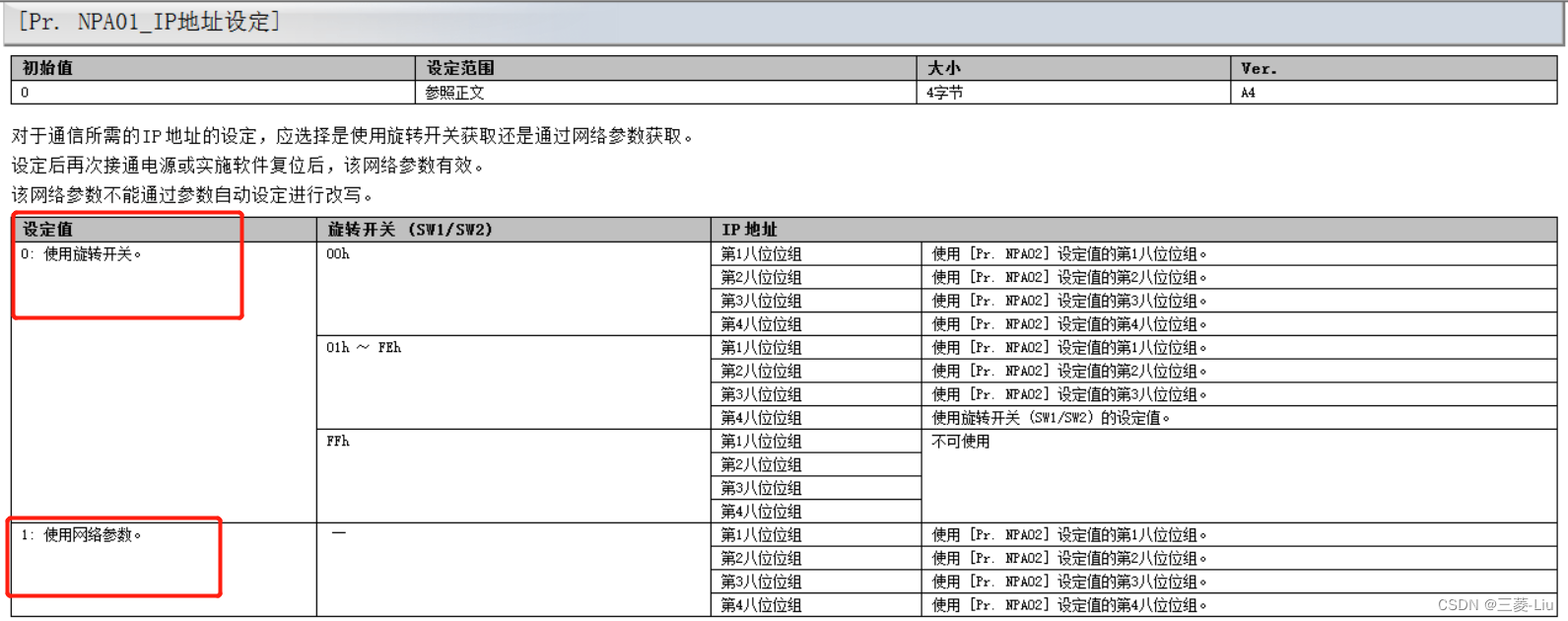
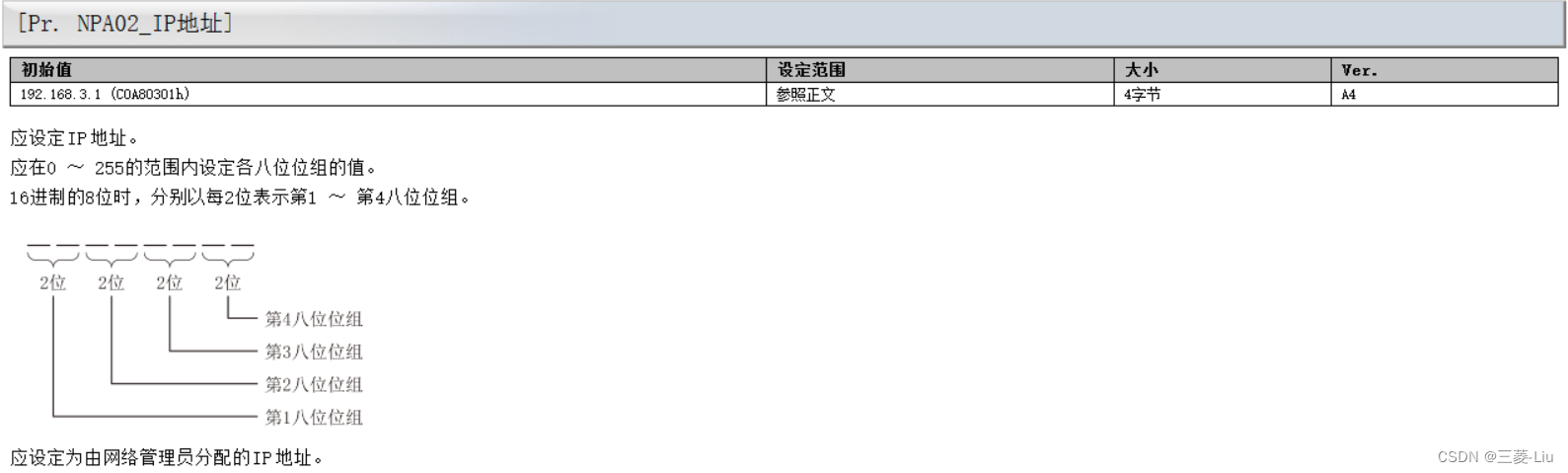
2****、网络参数(以下参数必须设置)
- JET伺服的本身IP地址可通过NPA01参数“使用参数”和“使用旋转开关”两种方式

3****、其他参数(以下参数按需设置)
- PA04.2伺服强制停止选择

- PD01.2正反转行程末端信号自动ON

- PA03.0 绝对位置检测系统选择

- PT45 原点复位方式

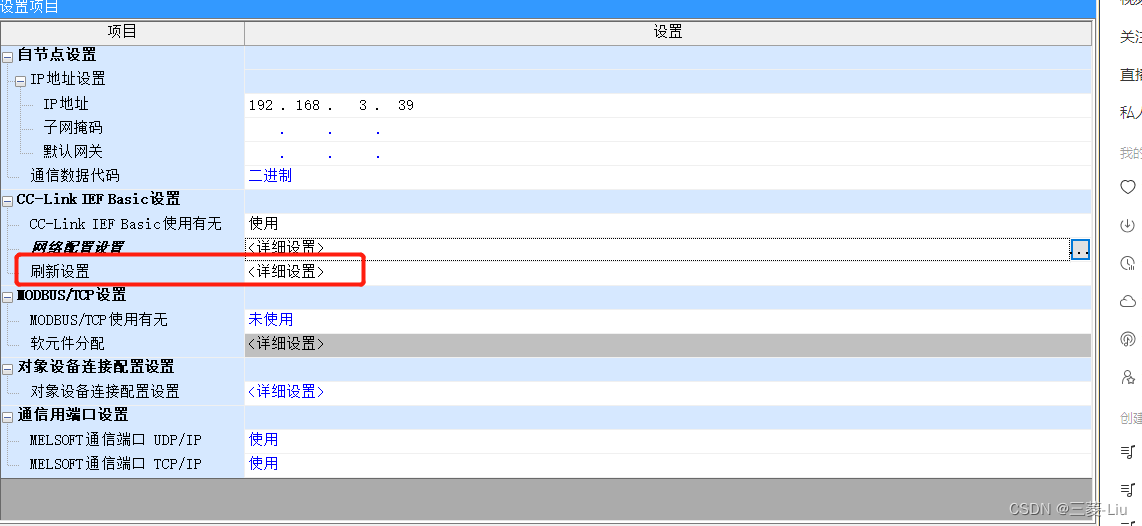
三****、FX5U PLC参数设定(GX WORKS3 软件)
1****、FX5U CCLINK IE 现场网络Basic配置JET
路径:FX5UCPU-[模块参数]-[以太网端口] -[基本设置] -[CC-LINK IEF Basic设置] 
CC-LINK IEF Basic设置-[网络配置设置]

1.1 CC-LINK IEF Basic****设置-[刷新设置]
1.2 CPU****侧刷新的地址范围(软元件名 和 起始地址 请必须按照如下设置)

单个JET伺服从站链接侧占用点数:Rx/Ry占用64点、RWw/RWr占用32点
图中例程配置了5个JET伺服从站,占用点数:Rx/Ry占用645=320点、RWw/RWr占用325=160点
不管配置多少台JET从站, 软元件名 和 起始地址 请必须按照上图设置,但是W寄存器默认范围最大512点,需要把W寄存器的范围扩大到1024点以满足最大16台JET的刷新范围,更改方式如下图:
[CPU参数]-[软元件、标签存储器区域设置]- [软元件(标准)设置]- [详细设置]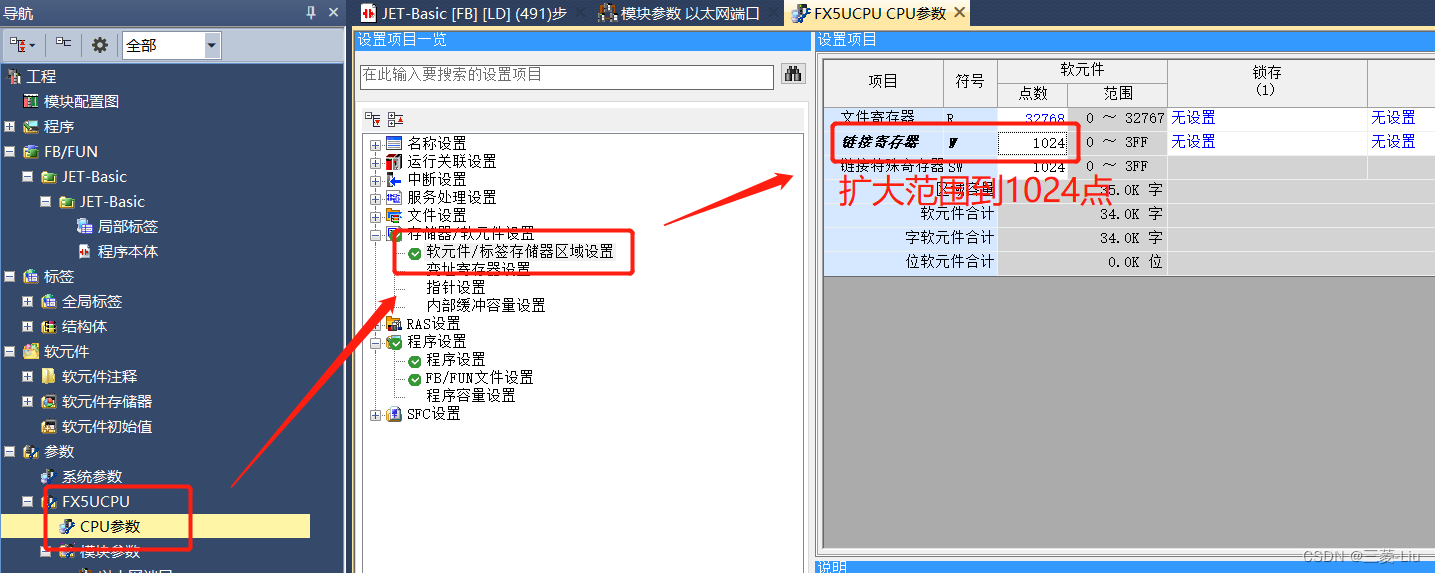
1.3 设置FX5U PLC本身IP地址,设置完所有参数后点击应用
四****、FX5U 与 JET 连接状态说明
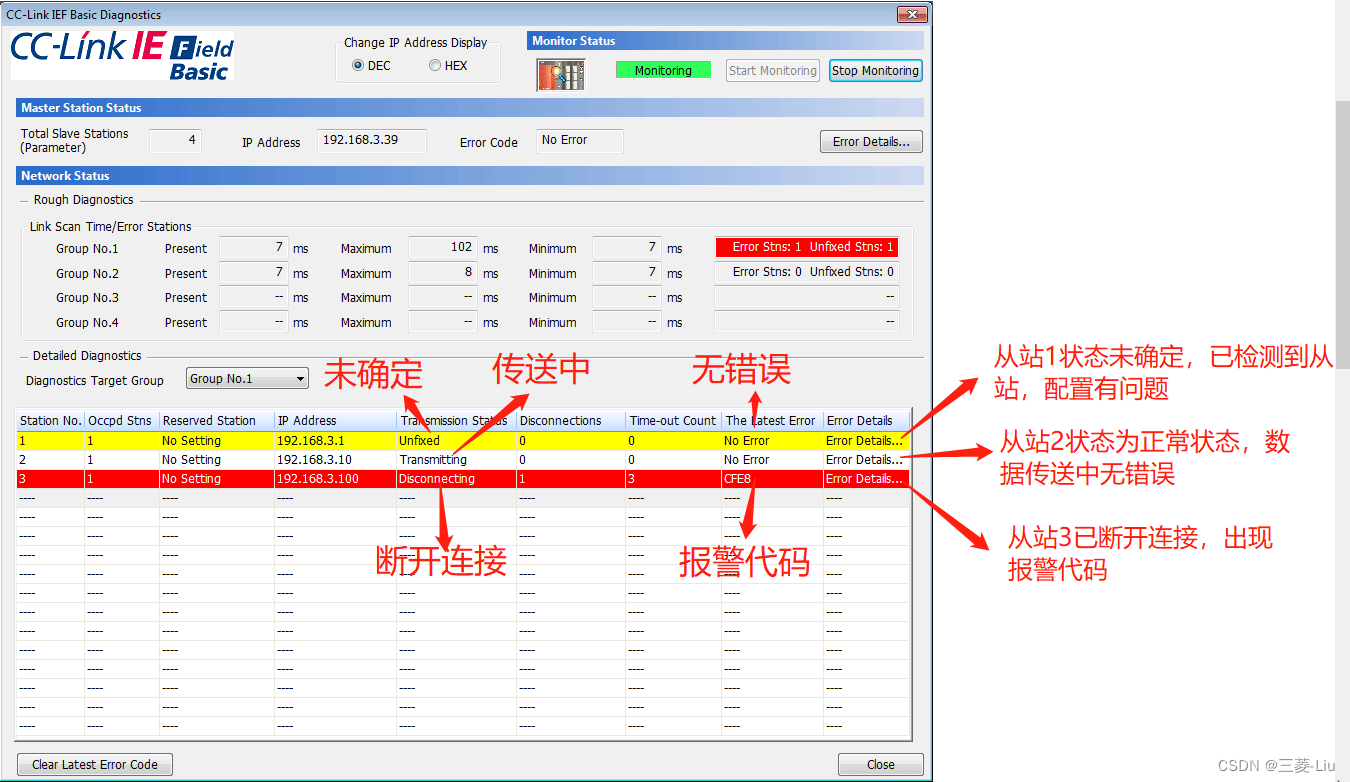
1、根据**[CC-LINK IEF Basic**诊断]判断当前FX5U与JET的连接状态
2、通过伺服放大器的显示部 (1位7段LED),可以确认网络的通信状态及报警的状态。
关于开关
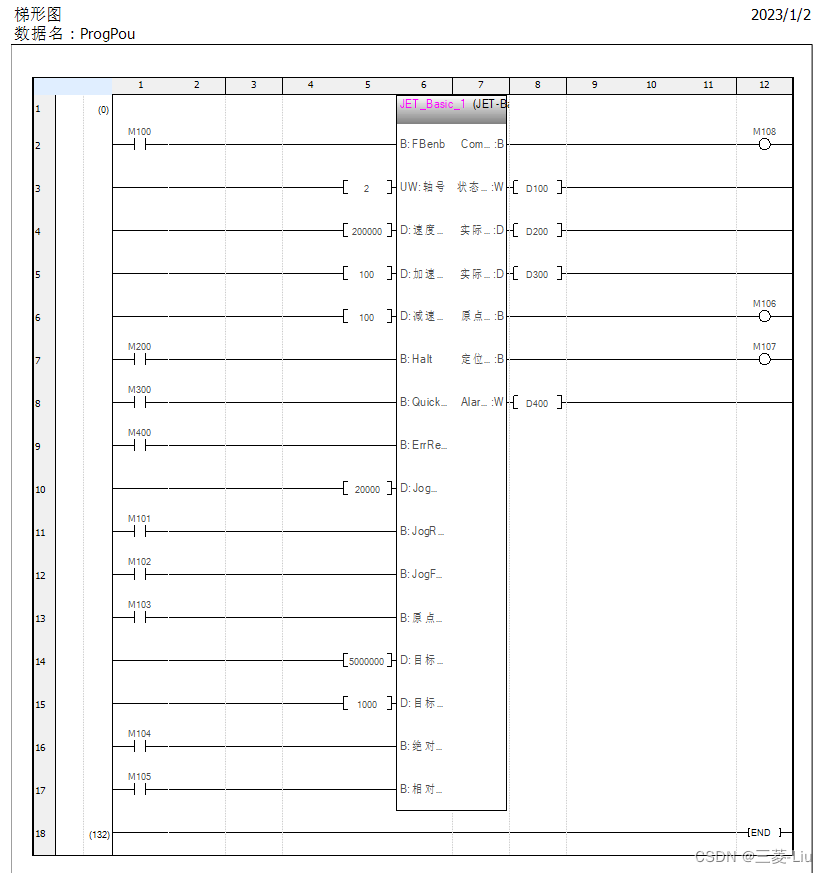
五****、FB块详细介绍
1、FB一览
2****、FB块输入输出引脚介绍
说明:FB 块输入或输出端:用大写字母表示该位置的状态:B(波尔位元件);W(单字元件);E(单精度浮点数);D(双字元件)
INPUT:
**FBenb: **FB块使能,循环通信建立,轴处于使能可操作状态。
轴号:1-16(最大控制16轴)。
速度限制值:设定速度限制值,单位0.01r/min。
**加速时间: **设定值应以ms为单位设定达到额定转速为止的加速时间。
减速时间: 设定值应以ms为单位设定从额定转速到停止的减速时间。
**Halt: **暂停,轨迹速度、位置模式下,导通此信号暂停,断开后恢复此前的动作。
QuickStop****:急停,无论任何状态下都可以停止,必须复位后才可进行其他动作。
ErrReset****:轴错误复位。
Jog****速度:轨迹速度模式下指令速度(Target velocity)设定轨迹速度模式(pv)中使用的速度指令。单位:0.01r/min。
JogRevStart****:轨迹速度模式下点动反转信号,导通时反转,断开此信号点动停止。
JogForStart****:轨迹速度模式下点动正转信号,导通时正转,断开此信号点动停止。
原点回归启动:原点回归启动信号(原点回归的类型在JET参数里设置)
目标位置: 轨迹位置模式下位置指令(绝对/增量)【设定范围】轨迹位置模式(pp)时,根据不同的单位,范围存在限制。degree单位:-360000~360000,degree单位以外:-999999~999999
目标速度: 轨迹位置模式下,可以设定速度指令值。以r/min为单位进行设定值的设定。
绝对定位启动:轨迹位置模式下,根据目标位置和目标速度进行绝对位置定位,脉冲信号即可,定位启动完即可复位。
相对定位启动:轨迹位置模式下,根据目标位置和目标速度进行绝对位置定位,脉冲信号即可,定位启动完即可复位。
OUTPUT:
**CommunicationCompleted: **通信建立输出标志位
状态显示:可读取当前的控制模式。各控制模式的值如下所示。
控制模式
显示值
轨迹位置模式(pp)
1
轨迹速度模式(pv)
3
轨迹转矩模式(tq)
4
原点复位模式(hm)
6
实际位置:显示指令单位下的伺服当前位置。
实际速度:显示当前伺服速度值,单位0.01r/min。
原点回归完成:原点回归完成标志位。
AlarmCode****:当前正在发生的报警( Current alarm 2)显示当前正在发生的报警编号。非报警发生过程中时,回复“0000h”。位0~位7:报警详细编号位8~位15:报警编号。
版权归原作者 三菱-Liu 所有, 如有侵权,请联系我们删除。