
文章目录
1.实验目的及资源
1.1 目的
根据手头要实现的需求,我需要通过手机端向32端发送指令,32端进行判断执行,所以采用esp8266的AP模式,将esp8266模块本身作为热点服务器,手机端作为客户端,连接热点WiFi发送数据。
1.2 资源
STM32rct6板、esp8266(ESP-01S)、手机端网络助手app
2.串口调试wifi模块
2.1 接线
wifi模块直接与TTL转串口模块相连即可,RX TX VCC GND,四根线连接对应即可。
2.2 AT指令测试
- 模块功能测试
AT
- wifi AP模式设置
AT+CWMODE=2
- 设置完重启模块
AT+RST
- 设置热点名称,密码,通道号,加密方式
AT+CWSAP="ESP8266","123456",11,3
- 开启多连接
AT+CIPMUX=1
- 创建服务器
AT+CIPSERVER=1,a(为端口号,默认333,最好不加,我改别的报错,不知道为啥)

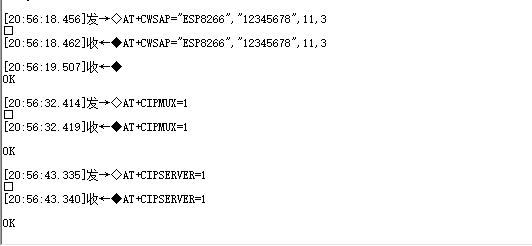
指令还会返回一些相关信息,这里没贴出来,因为我的乱码了,不过返回ok就没问题
完成以上指令后,基本上就设置完成了,当用手机app连接时,app随便下一个网络调试助手就行,选择TCP客户端,连接时需要8266模块的ip,和之前设置的端口,端口为333,ip可以通过指令查询:
AT+CIFSR




点击连接,串口返回如下:
若与与手机端在一定时间内不通信,则模块会断开此连接,默认为3分钟。
完成连接后进行通信测试:
- 手机发送数据,模块接收串口打印

串口接收如下:
- 模块发送,手机接收这里需要知道连接的id号,也就是上面接收数据如+IPD,0,2:12其中的0就是对应id号,采用指令发送数据
AT+CIPSEND=0,6//0为id号,6为要发送的数据长度
上面指令发送完成后直接继续发送数据即可
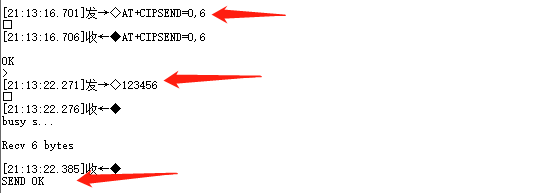
手机接收:
2.3 与手机app通信
3. STM32通过wifi与手机app通信
3.1 使用资源
- 串口3,esp8266模块连接串口3资源
- 定时器5,为什么使用定时器? 在esp8266接受数据产生中断时,因为我们并不知道接收的有多少数据,什么时候接收结束,所以采用一个定时器,当定时器清零前下一个数据到来表示是连续数据,重置定时器,若定时器时间到了还没有接收到下一条数据则表示数据接收完成,可进入定时器中断服务程序进行数据处理,添加接收完成标志位,如下代码 定时器5初始化:
#include"timer5.h"extern u8 start3;//串口中断接收完成标志//定时器5中断服务程序 voidTIM5_IRQHandler(void){if(TIM_GetITStatus(TIM5, TIM_IT_Update)!= RESET)//是更新中断{
start3=1;//标记串口数据接收完成TIM_ClearITPendingBit(TIM5, TIM_IT_Update );//清除TIM5更新中断标志 TIM_Cmd(TIM5, DISABLE);//关闭TIM5}}//通用定时器中断初始化//这里始终选择为APB1的2倍,而APB1为36M//arr:自动重装值。//psc:时钟预分频数 voidTIM5_Int_Init(u16 arr,u16 psc){
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE);//TIM7时钟使能 //定时器TIM7初始化
TIM_TimeBaseStructure.TIM_Period = arr;//设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc;//设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//TIM向上计数模式TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);//根据指定的参数初始化TIMx的时间基数单位TIM_ITConfig(TIM5,TIM_IT_Update,ENABLE );//使能指定的TIM5中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0;//子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能NVIC_Init(&NVIC_InitStructure);//根据指定的参数初始化VIC寄存器}
3.2 串口3初始化
- 串口3初始化
//初始化IO 串口3//bound:波特率 voidusart3_init(u32 bound){
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;//声明一个结构体变量,用来初始化GPIO //使能串口的RCC时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE);//使能UART3所在GPIOB的时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);//串口使用的GPIO口配置 // Configure USART3 Tx (PB.10) as alternate function push-pull
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOB,&GPIO_InitStructure);// Configure USART3 Rx (PB.11) as input floating
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOB,&GPIO_InitStructure);//串口中断配置 //Configure the NVIC Preemption Priority Bits // NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // Enable the USART3 Interrupt
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2;//子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);//配置串口
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// Configure USART3 USART_Init(USART3,&USART_InitStructure);//配置串口3 // Enable USART3 Receive interrupts 使能串口接收中断 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);// Enable the USART3 USART_Cmd(USART3, ENABLE);//使能串口3 USART_ClearFlag(USART3, USART_FLAG_TC);TIM5_Int_Init(1000-1,8400-1);//100ms中断TIM_Cmd(TIM5, DISABLE);//关闭定时器7}
- 串口3中断处理函数
//定义接收数组,接收缓冲,最大USART3_MAX_RECV_LEN个字节,宏定义为400unsignedchar USART3_RX_BUF[USART3_MAX_RECV_LEN];
u16 USART3_RX_STA=0;//数组标志位
u8 start3=0;//接收状态标志位voidUSART3_IRQHandler(void){
u8 res;if(USART_GetITStatus(USART3, USART_IT_RXNE)!= RESET)//接收到数据{
res =USART_ReceiveData(USART3);TIM_SetCounter(TIM5,0);//计数器清空 TIM_Cmd(TIM5, ENABLE);//使能定时器5
USART3_RX_BUF[USART3_RX_STA]=res;//记录接收到的值
USART3_RX_STA++;}}
- 串口3发送字符串函数
//串口3,printf 函数//确保一次发送数据不超过USART3_MAX_SEND_LEN字节voidu3_printf(char* fmt,...){
u16 i,j;
va_list ap;va_start(ap,fmt);vsprintf((char*)USART3_TX_BUF,fmt,ap);va_end(ap);
i=strlen((constchar*)USART3_TX_BUF);//此次发送数据的长度for(j=0;j<i;j++)//循环发送数据{while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET);//等待上次传输完成 USART_SendData(USART3,(uint8_t)USART3_TX_BUF[j]);//发送数据到串口3 }}
3.3 esp8266初始化
//清空每次中断接收完成后的数组voidClear_Buffer(void)//清空缓存{
u8 i;for(i=0;i<=USART3_RX_STA;i++)
USART3_RX_BUF[i]=0;//缓存
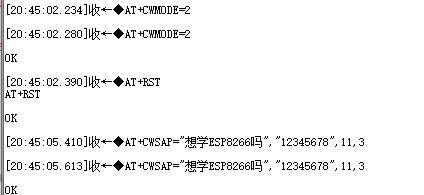
USART3_RX_STA=0;Delay_ms(100);}//模块初始化voidesp8266_start_trans(void){esp8266_send_cmd("AT+CWMODE=2","OK",50);Clear_Buffer();//Wifi模块重启esp8266_send_cmd("AT+RST","OK",20);Delay_ms(1000);//延时3S等待重启成功Delay_ms(1000);Delay_ms(1000);//AP模式esp8266_send_cmd("AT+CWSAP=\"想学ESP8266吗\",\"12345678\",11,3","OK",200);Clear_Buffer();esp8266_send_cmd("AT+CIPMUX=1","OK",20);Clear_Buffer();esp8266_send_cmd("AT+CIPSERVER=1","OK",200);Clear_Buffer();}
u8 esp8266_send_cmd(u8 *cmd,u8 *ack,u16 waittime){
u8 res=0;
USART3_RX_STA=0;u3_printf("%s\r\n",cmd);//发送命令printf("%s\r\n",cmd);Delay_ms(waittime);if(strstr((constchar*)USART3_RX_BUF,"OK")){Uart1_SendStr((char*)USART3_RX_BUF);}return res;}
3.4 主函数
extern u8 start3;externunsignedchar USART3_RX_BUF[USART3_MAX_RECV_LEN];intmain(void){/* 初始化 */USART1_Config();usart3_init(115200);CPU_TS_TmrInit();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);esp8266_start_trans();while(1){if(start3==1)//接收中断完成标志位{//判断接收的数据是否为密码数据,自己设置就行if(strstr((constchar*)USART3_RX_BUF,"12345678")){printf("开门成功\r\n");}if(!strstr((constchar*)USART3_RX_BUF,"12345678")){printf("密码错误\r\n");}Clear_Buffer();
start3=0;}}}
3.5 实验现象
- 初始化现象
- 手机app发送数据现象,发送五条数据,有对有错

本文转载自: https://blog.csdn.net/weixin_57246604/article/details/130442714
版权归原作者 无敌最俊朗- 所有, 如有侵权,请联系我们删除。
版权归原作者 无敌最俊朗- 所有, 如有侵权,请联系我们删除。