
C++实现点云NDT配准
来自https://adamshan.blog.csdn.net/article/details/79230612
读取点云信息
pcl::PointCloud<pcl::PointXYZ>::Ptr read_cloud_point(std::string const &file_path){
// Loading first scan.
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ> (file_path, *cloud) == -1)
{
PCL_ERROR ("Couldn't read the pcd file\n");
return nullptr;
}
return cloud;
}
在
main
函数中分别读取点云:
auto target_cloud = read_cloud_point("cloud1.pcd");
std::cout << "Loaded " << target_cloud->size () << " data points from cloud1.pcd" << std::endl;
auto input_cloud = read_cloud_point("cloud2.pcd");
std::cout << "Loaded " << input_cloud->size () << " data points from cloud2.pcd" << std::endl;
从两个pcd文件中读取出来的点的数量:
Loaded 112586 data points from cloud1.pcd
Loaded 112624 data points from cloud2.pcd
点云滤波处理
对如此多点做优化是非常耗时的,我们使用
voxel_filter
对输入的点云进行过滤,这里只对
input_cloud
进行了滤波处理,减少其数据量到10%左右,而
target_cloud
不做滤波处理:
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered_cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> approximate_voxel_filter;
approximate_voxel_filter.setLeafSize(0.2, 0.2, 0.2);
approximate_voxel_filter.setInputCloud(input_cloud);
approximate_voxel_filter.filter(*filtered_cloud);
std::cout<<"Filtered cloud contains "<< filtered_cloud->size() << "data points from cloud2.pcd" << std::endl;
NDT初始化以及参数设置
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
ndt.setTransformationEpsilon(0.01);
ndt.setStepSize(0.1);
ndt.setResolution(1.0);
ndt.setMaximumIterations(35);
ndt.setInputSource(filtered_cloud);
ndt.setInputTarget(target_cloud);
其中 ndt.setTransformationEpsilon() 即设置变换的 ϵϵ(两个连续变换之间允许的最大差值),这是判断我们的优化过程是否已经收敛到最终解的阈值。ndt.setStepSize(0.1) 即设置牛顿法优化的最大步长。ndt.setResolution(1.0) 即设置网格化时立方体的边长,网格大小设置在NDT中非常重要,太大会导致精度不高,太小导致内存过高,并且只有两幅点云相差不大的情况才能匹配。ndt.setMaximumIterations(35) 即优化的迭代次数,我们这里设置为35次,即当迭代次数达到35次或者收敛到阈值时,停止优化。
初始化参数并开始优化
我们对变换参数 p 进行初始化(给一个估计值),虽然算法不指定初值也可以运行,但是有了它,易于得到更好的结果,尤其是当两块点云差异较大时。变换参数的初始化数据往往来自与测量数据:
Eigen::AngleAxisf init_rotation(0.6931, Eigen::Vector3f::UnitZ());
Eigen::Translation3f init_translation (1.79387, 0.720047, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix();
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud (new pcl::PointCloud<pcl::PointXYZ>);
ndt.align(*output_cloud, init_guess);
std::cout << "Normal Distribution Transform has converged:" << ndt.hasConverged()
<< "score: " << ndt.getFitnessScore() << std::endl;
保存配准后的点云图,输出cloud3.pcd
pcl::transformPointCloud(*input_cloud, *output_cloud, ndt.getFinalTransformation());
pcl::io::savePCDFileASCII("cloud3.pcd", *output_cloud);
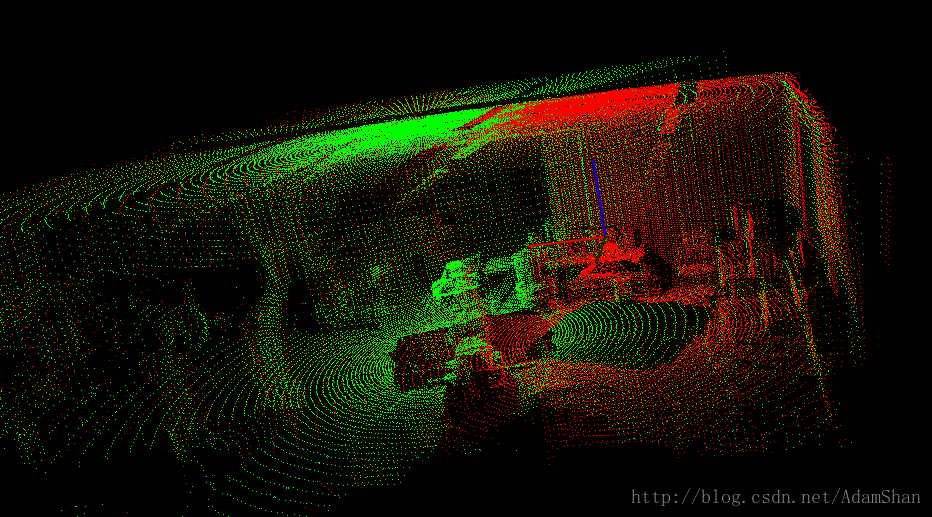
将配准以后的点云图可视化
我们写一个函数用于现实配准以后的点云,其中,目标点云(即我们已有的高精度地图)用红点绘制,而输入点云用绿点绘制:
void visualizer(pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud, pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud){
// Initializing point cloud visualizer
boost::shared_ptr<pcl::visualization::PCLVisualizer>
viewer_final (new pcl::visualization::PCLVisualizer ("3D Viewer"));
viewer_final->setBackgroundColor (0, 0, 0);
// Coloring and visualizing target cloud (red).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
target_color (target_cloud, 255, 0, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (target_cloud, target_color, "target cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "target cloud");
// Coloring and visualizing transformed input cloud (green).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>
output_color (output_cloud, 0, 255, 0);
viewer_final->addPointCloud<pcl::PointXYZ> (output_cloud, output_color, "output cloud");
viewer_final->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
1, "output cloud");
// Starting visualizer
viewer_final->addCoordinateSystem (1.0, "global");
viewer_final->initCameraParameters ();
// Wait until visualizer window is closed.
while (!viewer_final->wasStopped ())
{
viewer_final->spinOnce (100);
boost::this_thread::sleep (boost::posix_time::microseconds (100000));
}
}
}
效果
完整代码:NDT_PCL_demo
在实际运行代码我们发现我们这个demo的NDT计算比较耗时,其计算量主要集中在使用大量扫描点来优化目标函数上面。我们可以通过一些方法来提高NDT的运算效率,其中比较直接的方案就是使用GPU计算。在Autoware (https://github.com/CPFL/Autoware) 项目中,其定位模块就是基于NDT算法实现的,其通过使用CUDA实现的 fast_pcl package实现了对NDT优化过程的并行加速,
————————————————
版权声明:本文为CSDN博主「AdamShan」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/AdamShan/article/details/79230612
版权归原作者 Jumping润 所有, 如有侵权,请联系我们删除。