
粒子滤波 PF——三维匀速运动CV目标跟踪(粒子滤波VS扩展卡尔曼滤波)
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
原创不易,路过的各位大佬请点个赞
粒子滤波 PF——三维匀速运动CV目标跟踪(粒子滤波VS扩展卡尔曼滤波)
一、问题描述(离散时间非线性系统描述)
考虑一般非线性系统模型,
x
k
=
f
(
x
k
−
1
,
w
k
−
1
)
z
k
=
h
(
x
k
,
v
k
)
(1)
x_k=f(x_{k-1},w_{k-1}) \\ z_k=h(x_k,v_k ) \tag{1}
xk=f(xk−1,wk−1)zk=h(xk,vk)(1)
其中
x
k
x_k
xk为
k
k
k时刻的目标状态向量。
z
k
z_k
zk为
k
k
k时刻量测向量(传感器数据)。这里不考虑控制器
u
k
u_k
uk。
w
k
{w_k}
wk和
v
k
{v_k}
vk分别是过程噪声序列和量测噪声序列,并假设
w
k
w_k
wk和
v
k
v_k
vk为零均值高斯白噪声,其方差分别为
Q
k
Q_k
Qk和
R
k
R_k
Rk的高斯白噪声,即
w
k
∼
(
0
,
Q
k
)
w_k\sim(0,Q_k)
wk∼(0,Qk),
v
k
∼
(
0
,
R
k
)
v_k\sim(0,R_k)
vk∼(0,Rk),且满足如下关系(线性高斯假设)为:
E
[
w
i
v
j
′
]
=
0
E
[
w
i
w
j
′
]
=
0
i
≠
j
E
[
v
i
v
j
′
]
=
0
i
≠
j
\begin{aligned} E[w_iv_j'] &=0\\ E[w_iw_j'] &=0\quad i\neq j \\ E[v_iv_j'] &=0\quad i\neq j \end{aligned}
E[wivj′]E[wiwj′]E[vivj′]=0=0i=j=0i=j
二、贝叶斯滤波
定义
1
1
1 ~
k
k
k时刻对状态
x
k
x_k
xk的所有测量数据为
z
k
=
[
z
1
T
,
z
2
T
,
⋯
,
z
k
T
]
T
z^k=[z_1^T,z_2^T,\cdots,z_k^T]^T
zk=[z1T,z2T,⋯,zkT]T
贝叶斯滤波问题就是计算对
k
k
k时刻状态
x
x
x估计的置信程度,为此构造概率密度函数
p
(
x
k
∣
z
k
)
p(x_k |z^k)
p(xk∣zk),在给定初始分布
p
(
x
0
∣
z
0
)
=
p
(
x
0
)
p(x_0|z_0)= p(x_0)
p(x0∣z0)=p(x0)后,从理论上看,可以通过预测和更新两个步骤递推得到概率密度函数
p
(
x
k
∣
z
k
)
p(x_k |z^k)
p(xk∣zk)的值。
是不是卡尔曼滤波的雏形出现了,哈哈哈,预测、更新也存在KF中。
2.1、 预测
现假定
k
−
1
k- 1
k−1时刻的概率密度函数已知,则通过将Chapman-Kolmogorov等式应用
于动态方程(1),即可预测
k
k
k时刻状态的先验概率密度函数为
p
(
x
k
∣
z
k
−
1
)
=
∫
p
(
x
k
∣
x
k
−
1
)
p
(
k
−
1
∣
z
k
−
1
)
d
x
k
−
1
)
(2)
p(x_k |z^{k-1})=\int p(x_k |x_{k-1})p({k-1} |z^{k-1}) dx_{k-1}) \tag{2}
p(xk∣zk−1)=∫p(xk∣xk−1)p(k−1∣zk−1)dxk−1)(2)
实际上,状态转移方程写为概率密度的形式即为:
x
k
=
f
(
x
k
−
1
,
w
k
−
1
)
=
等价
p
(
x
k
∣
x
k
−
1
)
x_k=f(x_{k-1},w_{k-1}) \underset{\text{等价}}= p(x_k |x_{k-1})
xk=f(xk−1,wk−1)等价=p(xk∣xk−1)
式(2)中隐含假定了
p
(
x
k
∣
x
k
−
1
)
=
p
(
x
k
∣
x
k
−
1
,
z
k
−
1
)
p(x_k |x_{k-1})= p(x_k |x_{k-1}, z^{k-1})
p(xk∣xk−1)=p(xk∣xk−1,zk−1),实际上这本身在这里就是成立的,基于(1)式的马尔可夫过程。
2.2、 更新
在获得
p
(
x
k
∣
z
k
−
1
)
p(x_k |z^{k-1})
p(xk∣zk−1)的基础上,结合
k
k
k时刻得到的新的量测值,基于贝叶斯公式,可以计算
k
k
k时刻状态的后验概率密度函数:
p
(
x
k
∣
z
k
)
=
p
(
z
k
∣
x
k
)
p
(
x
k
∣
z
k
−
1
)
p
(
z
k
∣
z
k
−
1
)
(3)
p(x_k |z^{k})=\frac{p(z_k |x_k)p(x_k |z^{k-1})}{p(z_k |z^{k-1})} \tag{3}
p(xk∣zk)=p(zk∣zk−1)p(zk∣xk)p(xk∣zk−1)(3)
式中分子
p
(
z
k
∣
z
k
−
1
)
p(z_k |z^{k-1})
p(zk∣zk−1)有全概率公式得到
p
(
z
k
∣
z
k
−
1
)
=
∫
p
(
z
k
∣
x
k
)
p
(
x
k
∣
z
k
−
1
)
d
x
k
(4)
p(z_k |z^{k-1})=\int p(z_k |x_k)p(x_k |z^{k-1}) dx_{k} \tag{4}
p(zk∣zk−1)=∫p(zk∣xk)p(xk∣zk−1)dxk(4)
我就说吧,上述过程实际上贝叶斯后燕推断的公式,哈哈哈哈啊哈
实际上这也是卡尔曼滤波的更新思想:在
k k k时刻得到测量 z k z_k zk后,利用测量 z k z_k zk修正先验概率,进而获得当前时刻状态的后验概率。我正是太机智了,哈哈啊哈
三、粒子滤波 PF(贝叶斯滤波的MC实现)
粒子滤波实际上是递推贝叶斯滤波的蒙特卡洛实现的一种算法,即一种近似的贝叶斯滤波。
核心思想:是使用一组具有相应权值的随机样本(粒子)来表示状态的后验分布。该方法的基本思路是选取一个重要性概率密度并从中进行随机抽样,得到一些带有相应权值的随机样本后,在状态观测的基础上调节权值的大小。和粒子的位置,再使用这些样本来逼近状态后验分布,最后将这组样本的加权求和作为状态的估计值。粒子滤波不受系统模型的线性和高斯假设约束,采用样本形式而不是函数形式对状态概率密度进行描述,使其不需要对状态变量的概率分布进行过多的约束,因而在非线性非高斯动态系统中广泛应用。尽管如此,粒子滤波目前仍存在计算量过大、粒子退化等关键问题亟待突破。
通常情况下选择先验分布作为重要性密度函数、即
q
(
x
k
∣
x
k
−
1
(
i
)
,
z
k
)
=
p
(
x
k
∣
x
k
−
1
(
i
)
)
q(x_k |x_{k-1}^{(i)}, z_{k})=p(x_k |x_{k-1}^{(i)})
q(xk∣xk−1(i),zk)=p(xk∣xk−1(i))
对该函数取重要性权值为
w
k
(
i
)
=
w
k
−
1
(
i
)
p
(
z
k
∣
x
k
(
i
)
)
w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)})
wk(i)=wk−1(i)p(zk∣xk(i))
同样
w
k
(
i
)
w_k^{(i)}
wk(i)需要归一化得到
w
~
k
(
i
)
\tilde{w}_k^{(i)}
w~k(i)。
标准的粒子滤波算法步骤为:
粒子滤波PF:
Step 1: 根据p ( x 0 ) p(x_{0}) p(x0)采样得到 N N N个粒子 x 0 ( i ) ∼ p ( x 0 ) x_0^{(i)} \sim p(x_{0}) x0(i)∼p(x0)For
i = 2 : N i=2:N i=2:NStep 2: 根据状态转移函数产生新的粒子为:$
x k ( i ) ∼ p ( x k ∣ x k − 1 ( i ) ) x_k^{(i)} \sim p(x_{k} |x_{k-1}^{(i)}) xk(i)∼p(xk∣xk−1(i))Step 3: 计算重要性权值:
w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))Step 4: 归一化重要性权值:
w ~ k ( i ) = w k ( i ) ∑ j = 1 N w k ( j ) \tilde{w}_k^{(i)}=\frac{w_k^{(i)}}{\sum_{j=1}^Nw_k^{(j)}} w~k(i)=∑j=1Nwk(j)wk(i)Step 5: 使用重采样方法对粒子进行重采样(以随机重采样和系统重采样为例)
Step 6: 得到k k k时刻的后验状态估计: E [ x ^ k ] = ∑ i = 1 N x k ( i ) w ~ k ( i ) E[\hat{x}_{k}]= \sum_{i=1}^Nx_{k}^{(i)}\tilde{w}_k^{(i)} E[x^k]=i=1∑Nxk(i)w~k(i)End For
算法:系统重采样 (systematic resampling)
Fori = 1 : N i=1:N i=1:NStep 1: 初始化累积概率密度函数CDF:
c 1 = 0 c_1=0 c1=0For
i = 2 : N i=2:N i=2:NStep 2: 构造CDF:
c i = c i − 1 + w k ( i ) c_i=c_{i-1}+w_k^{(i)} ci=ci−1+wk(i)Step 3: 从CDF的底部开始:
i = 1 i=1 i=1Step 4: 采样起始点:
u 1 = U [ 0 , 1 / N ] u_1=\mathcal{U}[0,1/N] u1=U[0,1/N]End For
Forj = 1 : N j=1:N j=1:NStep 5: 沿CDF移动:
u j = u 1 + ( j − 1 ) / N u_j=u_{1}+(j-1)/N uj=u1+(j−1)/NStep 6: While
u j > c i u_j>c_i uj>ci i = i + 1 i=i+1 i=i+1End While
Step 7: 赋值粒子:x k ( j ) = x k ( i ) x_k^{(j)}=x_k^{(i)} xk(j)=xk(i)Step 8: 赋值权值:
w k ( j ) = 1 / N w_k^{(j)}=1/N wk(j)=1/NStep 9: 赋值父代:
i ( j ) = i i^{(j)}=i i(j)=iEnd For
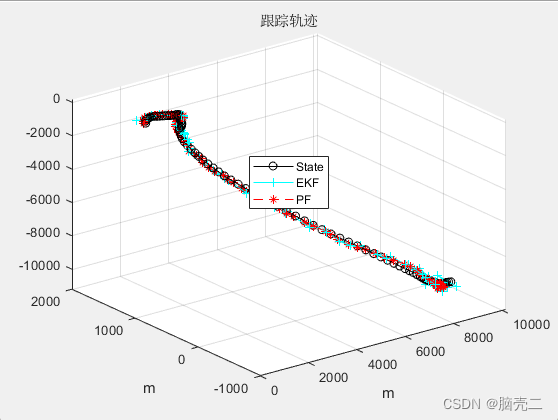
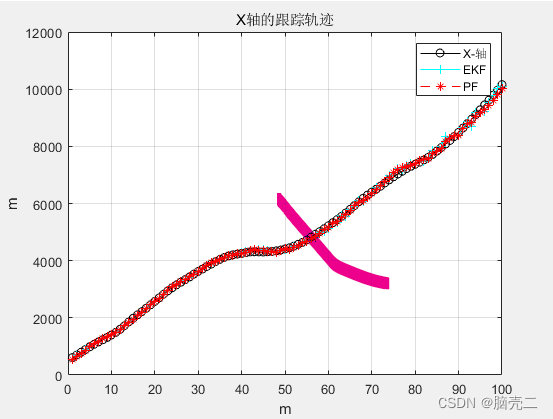
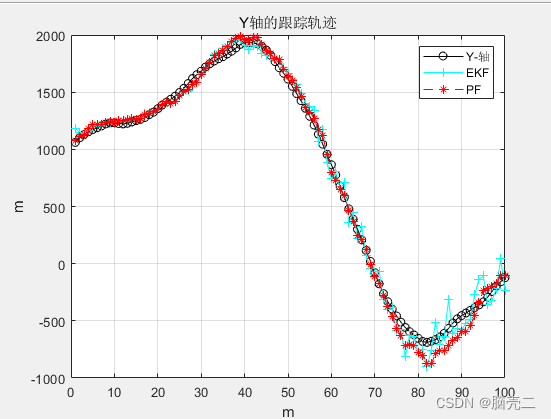
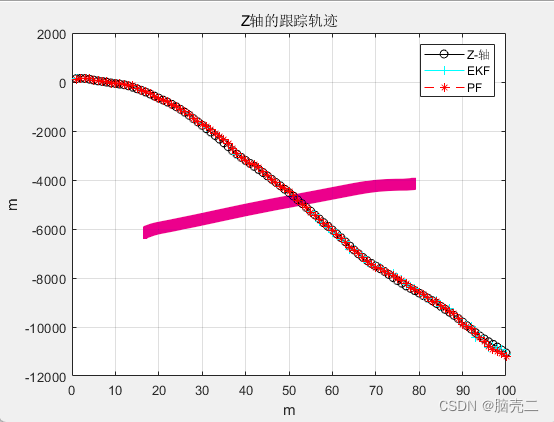
四、仿真场景:三维雷达目标跟踪
4.1 仿真场景(三维匀速目标)
目标模型
考虑一各三维的匀速运动目标(CV 模型):
x
k
+
1
=
F
k
x
k
+
G
k
w
k
x_{k+1}=F_kx_k+G _kw_k
xk+1=Fkxk+Gkwk
其中状态向量
x
k
=
[
x
k
,
x
˙
k
,
y
k
,
y
˙
k
,
z
k
,
z
˙
k
]
′
x_k=[x_k,\dot{x}_k,y_k,\dot{y}_k,z_k,\dot{z}_k]'
xk=[xk,x˙k,yk,y˙k,zk,z˙k]′;噪声为
w
k
=
[
w
x
,
w
y
,
w
z
]
′
w_k=[w_x,w_y,w_z]'
wk=[wx,wy,wz]′;状态转移矩阵
F
k
F_k
Fk和噪声驱动矩阵
G
k
G_k
Gk如下
F
k
=
[
1
T
0
0
0
0
0
1
0
0
0
0
0
0
1
T
0
0
0
0
0
1
0
0
0
0
0
0
1
T
0
0
0
0
0
1
]
Γ
k
=
[
1
/
2
T
2
0
0
T
0
0
0
1
/
2
T
2
0
0
T
0
0
1
/
2
T
2
0
0
T
]
F_k=\begin{bmatrix}1 & T & 0 & 0 & 0 & 0\\0 & 1 & 0 & 0 & 0 & 0 \\0 & 0 & 1 & T & 0 & 0\\0 & 0 & 0 & 1 & 0 & 0\\0 & 0 & 0 & 0 & 1 & T\\0 & 0 & 0 & 0 & 0 & 1\end{bmatrix} \qquad\varGamma_k=\begin{bmatrix}1/2T^2 & 0 & 0 \\T & 0 & 0 \\0 & 1/2T^2 & 0 \\0 & T & \\0 & 0 & 1/2T^2 \\0 & 0 & T\end{bmatrix}
Fk=⎣⎢⎢⎢⎢⎢⎢⎡100000T1000000100000T1000000100000T1⎦⎥⎥⎥⎥⎥⎥⎤Γk=⎣⎢⎢⎢⎢⎢⎢⎡1/2T2T0000001/2T2T000001/2T2T⎦⎥⎥⎥⎥⎥⎥⎤
采样时间
T
=
1
s
T=1s
T=1s. 初始状态为
x
0
∼
(
x
ˉ
0
,
P
0
)
x
ˉ
0
=
[
1
km
,
20
m/s
,
1
km
,
20
m/s
,
1
km
,
20
m/s
]
′
P
0
=
diag
(
1
0
5
m
2
,
1
0
2
m
2
/
s
2
,
1
0
5
m
2
,
1
0
2
m
2
/
s
2
,
1
0
5
m
2
,
1
0
2
m
2
/
s
2
)
x_0\sim(\bar{x}_0,P_0)\\\bar{x}_{0}=[1\text{km}, 20\text{m/s} ,1\text{km}, 20\text{m/s} ,1\text{km}, 20\text{m/s}]'\\P_{0}=\text{diag}(10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2, 10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2, 10^5\text{m}^2, 10^2\text{m}^2/\text{s}^2)
x0∼(xˉ0,P0)xˉ0=[1km,20m/s,1km,20m/s,1km,20m/s]′P0=diag(105m2,102m2/s2,105m2,102m2/s2,105m2,102m2/s2)
过程噪声均值和方差分别为
q
=
10
q=10
q=10
w
ˉ
k
=
[
0
,
0
,
0
]
′
Q
k
=
[
q
2
0
0
0
q
2
0
0
0
q
2
]
\bar{w}_k=[0,0, 0]'\\Q_k=\begin{bmatrix}q^2 & 0& 0 \\0 & q^2 & 0\\0&0 & q^2 \end{bmatrix}
wˉk=[0,0,0]′Qk=⎣⎡q2000q2000q2⎦⎤
如果为非线性目标,则将状态转移矩阵
F k F_k Fk代替为雅可比矩阵即可。为了不是一般性这里采用线性模型进行仿真。主要处理目标跟踪,雷达量测存在的非线性滤波问题。
雷达量测模型
在三维情况下,雷达量测为距离和角度
r
k
m
=
r
k
+
r
~
k
b
k
m
=
b
k
+
b
~
k
e
k
m
=
e
k
+
e
~
k
{r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k\\ e^m_k=e_k+\tilde{e}_k
rkm=rk+r~kbkm=bk+b~kekm=ek+e~k
其中
r
k
=
(
x
k
−
x
0
)
+
(
y
k
−
y
0
)
2
)
b
k
=
tan
−
1
y
k
−
y
0
x
k
−
x
0
e
k
=
tan
−
1
z
k
−
z
0
(
x
k
−
x
0
)
2
+
(
y
k
−
y
0
)
2
r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ e_k=\tan^{-1}{\frac{z_k-z_0}{\sqrt{(x_k-x_0)^2+(y_k-y_0)^2}}}\\
rk=(xk−x0)+(yk−y0)2)bk=tan−1xk−x0yk−y0ek=tan−1(xk−x0)2+(yk−y0)2zk−z0
[
x
0
,
y
0
,
z
0
]
[x_0,y_0,z_0]
[x0,y0,z0]为雷达坐标,一般情况为0。雷达量测为
z
k
=
[
r
k
,
b
k
,
e
k
]
′
z_k=[r_k,b_k,e_k]'
zk=[rk,bk,ek]′。雷达量测方差为
R
k
=
cov
(
v
k
)
=
[
σ
r
2
0
0
0
σ
b
2
0
0
0
σ
e
2
]
R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 &0\\0 & \sigma_b^2 &0\\0&0& \sigma_e^2 \end{bmatrix}
Rk=cov(vk)=⎣⎡σr2000σb2000σe2⎦⎤且
σ
r
=
20
m
\sigma_r=20m
σr=20m,
σ
b
=
20
m
r
a
d
\sigma_b=20mrad
σb=20mrad,
σ
e
=
15
m
r
a
d
\sigma_e=15mrad
σe=15mrad。
4.2 跟踪轨迹
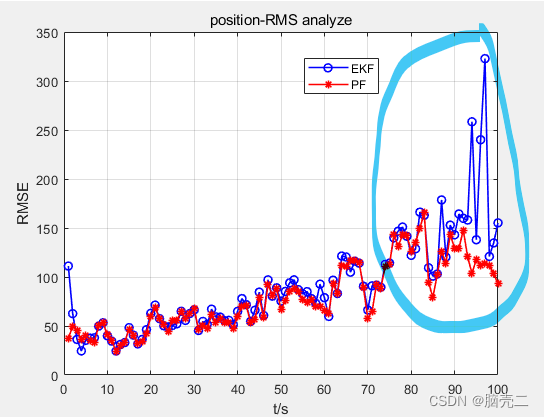
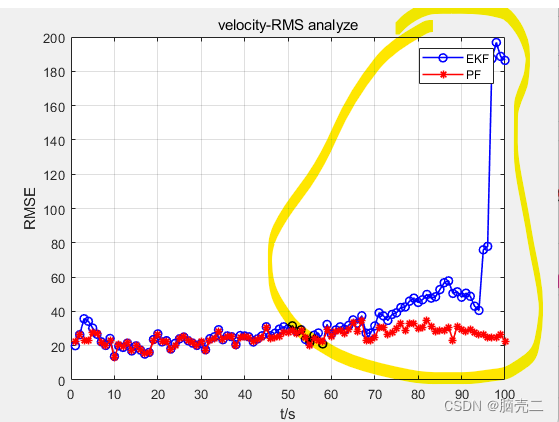
4.3 跟踪误差
五、部分代码
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
5.1、主函数部分代码
clear all; close all; clc;%% initial parameter
n=6;%状态维数 ;
T=1;%采样时间
M=1;%雷达数目
N=100;%运行总时刻
MC=10;%蒙特卡洛次数
global N_pf
N_pf=5000;% 采样点数PF
chan=1;%滤波器通道,这里只有一个滤波器
w_mu=[0,0,0]';% mean of process noise
v_mu=[0,0,0]';% mean of measurement noise
%% target model
%covariance of process noise
q=10;%m/s^2
Qk=q^2*eye(3);% state matrix
% CV
Fk=[1,T,0,0,0,0;0,1,0,0,0,0;0,0,1,T,0,0;0,0,0,1,0,0;0,0,0,0,1,T;0,0,0,0,0,1];
Gk=[ T^2/2,0,0;
T,0,0;0,T^2/2,0;0, T,0;0,0,T^2/2;0,0, T ];%量测模型
sigma_r(1)=20;sigma_b(1)=20e-3;sigma_e(1)=15e-3;% covariance of measurement noise(radar)% sigma_r=300; sigma_b=200e-3; sigma_e=100e-3;
Rk=diag([sigma_r(1)^2,sigma_b(1)^2,sigma_e(1)^2]);
xp=[0,0,0,0,0,0];%雷达位置
%% 定义存储空间
sV=zeros(n,N,MC);% 状态
eV=zeros(n,N,MC,chan);%估计
PV=zeros(n,n,N,MC,chan);%协方差
rV=zeros(3,N,MC,M);%%量测
for i=1:MC
sprintf('rate of process:%3.1f%%',(2*i)/(4*MC)*100)% 初始状态的均值和方差
x=[1000,500,1000,0,100,100]';
P_0=diag([1e4,10^2,1e4,10^2,1e4,10^2]);
x=[1000,80,1000,50,100,10]';
P_0=diag([1e5,10^2,1e5,10^2,1e5,10^2]);% x=[100,50,100,50,100,50]';% P_0=diag([5e5,1e3,5e5,1e3,5e5,1e3]);%initial covariance
xk_EKF=x; Pk_EKF=P_0;% P0|0 x0|0
xk_pf=x; Pk_pf=P_0;% P0|0 x0|0%产生N个粒子
for ii =1: N_pf
xpart(:,ii)= x+sqrtm(P_0)*randn(6,1);
end
5.2、PF部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%函数功能:实现随机重采样算法
%输入参数:weight为原始数据对应的权重大小
%输出参数:outIndex是根据weight对inIndex筛选和复制结果
function outIndex=randomR(weight)%获得数据的长度
L=length(weight);%初始化输出索引向量,长度与输入索引向量相等
outIndex=zeros(1,L);%第一步:产生[0,1]上均匀分布的随机数组,并升序排序
u=unifrnd(0,1,1,L);
u=sort(u);%u=(1:L)/L%这个是完全均匀
%第二步:计算粒子权重积累函数cdf
cdf=cumsum(weight);%第三步:核心计算
i=1;for j=1:L
%此处的基本原理是:u是均匀的,必然是权值大的地方
%有更多的随机数落入该区间,因此会被多次复制
while(i<=L)&(u(i)<=cdf(j))%复制权值大的粒子
outIndex(i)=j;%继续考察下一个随机数,看它落在哪个区间
i=i+1;
end
end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 系统重采样子函数
% 输入参数:weight为原始数据对应的权重大小
% 输出参数:outIndex是根据weight筛选和复制结果
function outIndex =systematicR(weight);
N=length(weight);
N_children=zeros(1,N);
label=zeros(1,N);
label=1:1:N;
s=1/N;
auxw=0;
auxl=0;
li=0;
T=s*rand(1);
j=1;
Q=0;
i=0;
u=rand(1,N);while(T<1)if(Q>T)
T=T+s;N_children(1,li)=N_children(1,li)+1;else
i=fix((N-j+1)*u(1,j))+j;
auxw=weight(1,i);
li=label(1,i);
Q=Q+auxw;weight(1,i)=weight(1,j);label(1,i)=label(1,j);
j=j+1;
end
end
index=1;for i=1:N
if(N_children(1,i)>0)for j=index:index+N_children(1,i)-1outIndex(j)= i;
end;
end;
index= index+N_children(1,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
版权归原作者 脑壳二 所有, 如有侵权,请联系我们删除。