
系列综述:
💞目的:本系列是个人整理为了操作系统学习,整理期间苛求每个知识点,平衡理解简易度与深入程度。
🥰来源:材料主要源于南京大学操作系统jyy老师课程进行的,每个知识点的修正和深入主要参考各平台大佬的文章,其中也可能含有少量的个人实验自证。
🤭结语:如果有帮到你的地方,就点个赞和关注一下呗,谢谢🎈🎄🌷!!!
🎉相关网址:jyy老师的博客
文章目录
操作系统概述
生存指南
- linux设计哲学 - Keep it simple, stupid- Everything is a file- All in terimal
- 学习操作系统的目的 - 你体内的编程力量没有完全觉醒:看到一切东西都可以写出来- 酷的事情和学的数学理论之间的gap连接起来
- 操作系统定义 - 充分利用软硬件资源,为系统提高服务的程序
- 两个操作系统的顶会 - OSDI/SOSP
- 进程地址隔离的原因 - 避免进程指针访问错误,从而导致其他进程程序错误
- 多道批处理系统 - 进程与OSKernal交替运行,其他进程负责任务处理,kernel负责切换和资源调度
- 程序的运行就是一个状态机 - 内存和寄存器存储状态- cpu运行的指令改变内存的状态(pc指向的指令的执行)
什么是程序和编译器
- 状态机和数字电路 - 状态:内存M+寄存器R- 初始状态:RESET- 迁移:组合逻辑电路计算寄存器下一周期的值
- 数字逻辑电路的步骤 - 定义并初始化所有寄存器- 在一个时钟周期到来时,运行组合逻辑电路- 将结果更新到寄存器中
- 管道思想 - 将一个程序的输出作为下一个程序的输入
- 程序本质是一个状态机 - 程序运行在计算机上- 计算机本质是一个数字系统- 数字系统本质是一个状态机
- C语言的程序也是状态机 - 堆栈表示状态- 语句表示状态迁移的规则- eg:单步调试就是状态机中状态的转换,堆栈存储的是当前的状态
- 函数调用的状态机思路 - 状态:调用函数会创建对应的栈帧- 执行:函数中指令的执行导致栈帧状态的转换- 函数调用的返回:将该函数的栈帧删除
- 状态机之间的转换需要通过
指令,指令有两种 - 计算- syscall - 状态机可以观测
- 真正的计算机从业者应该具有读官方手册的能力
- 编译器其实就是对于状态机的生成和优化
externint g;// 全局变量,其他程序可能使用,不可优化voidfoo(int x){ g++;asmvolatile("nop"::"r"(x));// __sync_synchronize();// 这个barrier将不可优化 g++;}// 即使两个g++中间代码不可优化,但使用-O2仍然可以优化 - 操作系统管理了所有的软硬件资源,具有最高权限
- 计算机系统不存在玄学,一切都建立在确定的机制上
- 通过工具去观测程序运行中状态机的状态
- 程序运行 - 另一个进程执行execve设置初始状态- 状态机执行计算指令和syscall-
_exit(exit_group)退出 - 程序 = 状态机 - 源代码视角:状态转移 = 执行语句- 二进制视角:状态转移 = 执行指令
多处理器编程
- 并发的基本单位:线程 - 从状态机视角:并发的线程实际是同一个基本状态延申出来的,不同线程间执行的状态流是独立的,通过共享内存进行通信。- 并发程序执行的每一步都是不确定的
- join含义 - 如果一个进程有三个线程t1、t2、t3,那么当
t1.join()时,意味着t1状态转换的指令是while(t2没结束&&t3没结束);,即选择t1执行会进入状态机的死循环,从而等待t2和t3执行完成。 - 线程是共享内存空间的,即没有逻辑地址空间的独立性,但是有线程栈帧的独立性
- 在多处理器体系下,指令无法独占处理器执行,即多线程的状态机中的初始状态下下一个状态可能是多分支的
- 状态机模型 - 单线程
 - 多线程
- 多线程
- 线程安全:能够保证多线程的原子性
- 并发问题的队列解决 - 99%的并发问题可以使用队列这个数据结构进行处理- 将大问题切分成小问题- worker thread去锁保护队列中取任务- 除去不可并行部分,可并行部分可以获得线性的加速
- 多处理器编程需要放弃对于单线程状态机的旧理解 - 放弃原子性:并发导致了状态机中状态的转换可能出现分支- 放弃顺序性:编译器对于内存访问“evenual consistent”的处理导致共享内存作为线程同步工具的失效- 放弃可见性:现代处理器对于指令的乱序发射的优化,导致程序语义与指令语义的不同
- 编译器的优化是按照单线程的状态机进行代码的优化 - 结果一致性:无论中间状态的转换,只要状态机最后的状态是一致的即可去除中间状态转换
- 避免优化:保持C和汇编语义的一致性 -
__sync_synchronize();-asm volatile("":::"memory");// 强制写回内存 - 现代处理器也是一个动态编译器
- 在处理器中执行的指令是一个DAG有向无环图,这个图是通过逻辑相关性确定的,每次尽可能的多发射指令进行处理
- 线程内存模型 - x86架构:每个线程有自己的缓存,结果一致性体现在共享内存中
 - risc-v架构:每个线程都有自己的内存副本,是一种分布式的架构,不需要保证内存一致性
- risc-v架构:每个线程都有自己的内存副本,是一种分布式的架构,不需要保证内存一致性
- 现代的编译器(处理器的一部分):是一个动态的数据流分析器
理解并发程序执行
- 并发程序 = 多个执行流并且共享内存的状态机器
- 通过状态机视角,去理解程序的执行。包括并发程序。
- 互斥:两个或多个线程不能同时执行一段代码
- 并发问题锁
int locked = UNLOCK;voidthreadx(){while(locked != UNLOCK);// 有锁则自旋 locked = LOCK;// 临界区 locked = UNLOCK;}- 状态机中包含两个线程的栈帧和pc(程序计数器,即下一条指令地址),以及全局锁变量(共享变量)- 错误并发的状态机模型 - 第一个状态:线程1和线程2都建立了threadx的函数栈帧,pc均指向while指令处- 执行:线程1执行,读locked为UNLOCK,执行完while并pc指向下一条指令- 第二个状态:线程1pc为locked=LOCK指令执行处。线程2pc内容为while指令处- 执行:线程2执行,读locked为UNLOCK,执行完while并pc指向下一条指令- 第二个状态:线程1和线程2的pc均为locked=LOCK指令执行处- 执行:无论线程1或线程2执行,在之后切换线程执行时均会导致两个线程都在临界区中。 - Pertenson算法(两个线程看似谦让,实则自私) - 任何一个线程想进入临界区,先更改自己的flag,然后将共享变量更改为对方- 查看对方的flag和共享变量,如果对方的置flag为true并且门上名字不是自己则等待,否则进入- 当离开临界区时,置自己的flag为flase
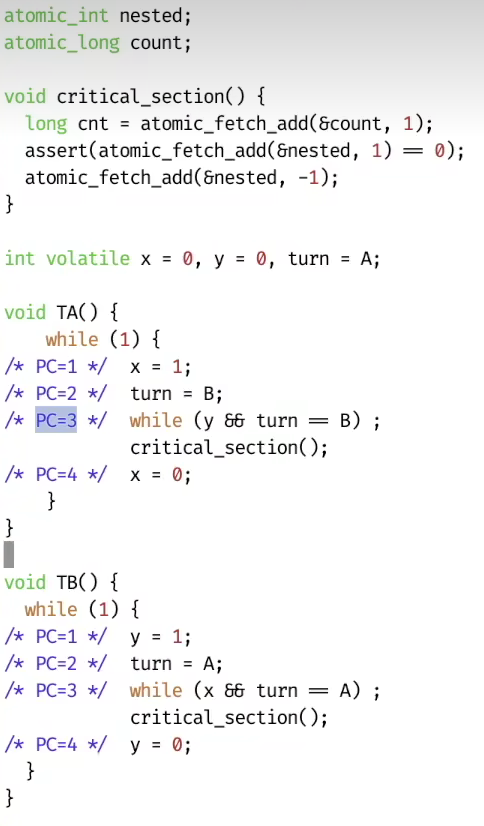

- 把线程想象成自己和他人,把物理世界的客观物体(旗子…)想象成共享内存。
- 线程读取(看到)的共享内存状态是一个历史history,而共享内存写入的东西是一个时间点(瞬间完成的)
- liveness:任何状态出发,总是能在有限步内到达同一个确定的状态
任何程序可以建立状态机转换模型,通过暴力枚举状态机的方式进行程序正确性的证明。- 每一个程序的正确性验证,都可以自己写一个model checker程序,将状态空间进行遍历检查
- 抽象的角度看一个状态机,它就是一个图。通过图论的方式,将所有的业务逻辑编写成图的形式。
- 系统需要工具进行人机的交互解释
并发控制
- lock函数返回含义是调用线程获取了独占某个资源的锁
- 独立瞬时的读写操作导致
写前和读后对于状态的未知性 - 读:看一眼就把眼睛闭上,即读只能读到一瞬间的状态,读的是一个history- 写:闭着眼睛改变,即写入只能覆盖,无法知道写入时的状态 - 问题无法解决就解决问题的假设(提出问题的人)
- 只使用一个原子变量实现互斥 - 实现读写的瞬间一致性:一个线程写共享变量时,先读后写,且读写瞬间共享变量屏蔽其他线程- 汇编实现:atomic exchange(load+store)
intxchg(volatileint*addr,int newval){int result;asmvolatile("lock xchg %0, %1"::"=r"(val),"+m"(*addr):"m"(*ptr),"0"(val));return result;}// 自旋锁int locked =0;voidlock(){while(xchg(&locked,1));}voidunlock(){xchg(&locked,0);} - 代码是两个 层面的东西,一个层面是人所理解的业务逻辑,另一个是机器层面。真正理解代码需要对于两个层面都深入了解
- 原子指令模型 - 之前的所有store写操作都会写入到内存中- 所有的内存访问都不能越过原子指令
- 原子指令的实现 - 通过一个bit表示总线资源的锁,访问内存需要先获得总线的锁
- x86中的L1缓存是连接在一起的,为了实现缓存的一致性
- 常见原子操作的本质 - load- exec(处理器的寄存器的运算)- store
- risc-v的原子操作:先运算出结果放到缓存中,当需要同步到内存时,先打标记,再判断标记是否存在,存在时再写入内存,然后删除标记
// CAS锁(compare and swap)的实现机制intcas(int addr,int cmp_val,int new_val){int old_val =*addr;// 读取标记if(old_val == cmp_val){// 标记等于自己的之前打的,则写入*addr = new_val;return0;}else{return1;}} - 自旋锁的缺陷 - lock和unlock执行时是原子的,指令无法乱序- 除了进入临界区的线程,处理器的上的其他线程都在空转- 时间片轮转:获得自旋锁的线程在就绪队列中排队,其他线程获得CPU会空转,实现了100%的资源浪费
- 性能的评价维度 - 空间复杂度- 时间复杂度- scalability伸缩性:多处理器性能的度量,难以严谨的计算(CPU功耗受温度影响,系统中的其他进程)
- 自旋锁的特点 - 快的时候很快:锁的争抢比较少,只需要一条原子指令的开销即可获得锁- 慢的时候很慢:多个线程争抢时,只有一个线程获得锁,其他的均会自旋等待。如果持有自旋锁的线程切换或睡眠,会发生100%的cpu资源浪费(一核有难,八核围观)
- 解决自旋锁慢的问题,C语言只能做到程序的计算,无法掌控资源的切换。资源的切换必须通过系统调用,所以自旋锁通常放到内核并发数据结构中,作为一个系统调用给用户程序使用 -
syscall(SYSCALL_lock, &lock);:尝试获取lock,如果失败就立即切换到其他线程-syscall(SYSCALL_unlock, &lock);:释放lock,如果有等待的线程则直接唤醒 - 吸优去慢(工程上的优化,通常只优化常见的80%或者最短的木桶板) - Fast path:一条原子指令,上锁成功立即返回- Slow path:上锁失败,立即执行系统调用,使进程睡眠,从而减少cpu资源的占用
- POSIX线程锁的实现 - 待定
- 有拥堵时,进内核
内联汇编
- 内联汇编 - %number:是对于输出对象和输入对象的顺序编号
asm[volatile](// volatile向gcc声明该汇编代码不需要进行优化(可选)"assembler template"// 汇编模板代码[: output operands ]// 输出对象(可选)[: input operands ]// 输入对象,即按序为汇编指令参数中的%num(可选)[: list of clobbered registers ]// 告诉编译器该寄存器可能会被修改,要在本次内联汇编使用);// 示例:将a赋值给bint a=10, b;asm("movl %1,%%eax;/* NOTICE: 下面会说明此处用%%eax引用寄存器eax的原因 movl %%eax, %0;" :"=r"(b) // 输出参数 %0 :"r"(a) // 输入参数 %1 :"%eax" // 可能用的寄存器 );
同步
- 定义:两个或两个以上随事件变化的量,在变化过程中保持一定的相对关系
- 同步电路:所有触发器在边沿同时触发
- 线程同步:在某个时间点共同达到互相已知的状态,条件不满足其中一方要等待。
- 99%的实际并发问题都可以使用生产者-消费者进行解决 - 生产者:向队列中添加资源(任务)- 消费者:从队列中取出资源(任务)- 其中对于共享资源的使用需要进行加锁和取消锁
- 对自己的程序进行压力测试,并编写压力测试的检查程序,保证自己代码的正确性
- 将互斥锁的自旋变成睡眠,直到某个条件变量被满足时唤醒某些线程 - wait(cv):条件变量不满足时,直接sleep()- signal(cv):唤醒一个或多个等待的线程
// 万能的条件变量并发模板:可以将任何可并行算法编程并行的mutex_lock(&mutex);while(!condition){wait(&cv,&mutex);}assert(condition);// **********// 互斥锁保证了在此期间条件变量condition总是成立// ***********mutex_unlock(&mutex);// 其他线程可能满足时broadcast(&cv); - 多使用assert进行错误提示,可以进行bug定位
哲学家就餐问题
- 如果所有哲学家都举起同一边的叉子,则所有的哲学家都会进行等待,即发生了死锁
- 万能并发模板解决哲学家吃饭问题(所有人都均等的使用叉子并不好,没有一个并发的数据结构)
mutex_lock(&mutex);while(!(avail[lhs]&& avail[rhs])){// 看左右手的叉子是否都在wait(&cv,&mutex);// 有一个叉子不在,则睡眠}// 将左右手叉子都拿起来avail[lhc]= avail[rhs]=false;mutex_unlock(&mutex);// 释放信号量mutex_lock(&mutex);avail[lhs]=avail[rhs]=true;// 还叉子broadcast(&cv);// 唤醒其他进程mutex_unlock(&mutex); - 让一个人集中管理叉子,放弃信号量 - 非集中式的管理共享资源,会导致分布式的自同步,每个线程都想试一下
// master/follower 生产者/消费者模型voidTphilosopher(int id){// 哲学家线程send_request(id, EAT);// 给服务员的队列发一个消息,请求吃P(allowed[id]);// 等待服务员许可philosopher_eat();// 就餐send_request(id, DONE);// 给服务员的队列发一个消息,吃完了}// 集中调度器:可以维护公平性(让长时间不占叉子的线程,下次分配时等一等)voidTwaiter(){// 服务员线程while(1){(id, status)=receive_request();if(status == EAT){...}if(status == NONE){...}}}
- 在不了解系统的性能瓶颈之前,不要做任何的优化
真实世界的并发编程
高性能计算
- 计算机任务如何分解 - 计算图要更容易并行化(使用拓扑排序,分解有向无环图)- 生产者-消费者解决一切
- 问题划分 - 模拟宏观世界:使用有限元模型- 模拟微观世界:使用粒子模型
- 数据中心:多副本下高可靠、低延迟数据的访问 - Consistency:数据要保持一致性- Availability:服务时刻保持可用- Partition tolerance:容忍机器离线
- 每个线程做的事情:读取——处理——写回
- 一个线程一次只能运行一个协程,协程不受操作系统调度。但是每个线程会占用可观的操作系统资源。
- 解决协程block问题:一个协程等待资源,其他协程也一起等待 - Go同时实现多处理器并行和轻量级并发——goroutine(线程和协程的混合体)- 执行到blockingAPI时(例如read、sleep)。 - 成功:立即返回- 失败:立即yield到另一个需要cpu的goroutine- 根本思想:当协程要做一件阻塞耗时的事情时,先发出资源请求的系统调用然后阻塞自己,yeild到另一个需要cpu资源的协程执行,当系统资源准备完成时,阻塞协程重新进入就绪队列 。这个过程中不会发生线程切换的堆栈资源开销,几乎每时每刻都有cpu和协程在运行,实现了近100%的cpu资源利用
- 有原子操作可以实现条件变量,有条件变量可以实现任何的并发算法
- 越底层,越自由,越容易出错,越高效。但是大多数程序稳定性要求要高于性能要求,所以可以使用通用的安全的接口去实现容易发生不安全的行为 - 既然生产者-消费者可以解决绝大部分的并发问题,那提供一个安全高效的API不就可以了?
// go实现生产者和消费者模型
package main
import"fmt"// 并发的共享队列
var stream =make(chan int,10)const n =4// 生产者
func produce(){for i :=0;; i++{
fmt.Println("produce", i)
stream <- i// 放一个到共享队列中}}// 消费者
func consume(){for{
x :=<- stream
fmt.Println("consume", x)}}
func main(){for i :=0; i < n; i++{
go produce()}consume()}
- web前端的并发模型 - 异步事件模型 - 所有事件通过一个线程执行,每个事件执行都是原子的- 全局的事件队列按序返回,其中耗时的API调用会立即返回,满足条件时向队列中增加一个事件- 缺点:多层嵌套,可维护性差。 可以通过流程图进行事件的化重新划分
并发bug和应对
- 始终假设自己的代码时错误的
- 需求 = 抽象代码 + 规约(面试加分) - assert断言机制,将代码在运行后仍肯定存在的属性进行内在规约。 -
assert(对象之间的关系),这里的对象通常是局部变量或者全局变量- 异常处理机制 - 产生死锁的必要条件(必须同时成立) - 互斥:一个资源每次只能被一个进程使用- 请求与保持:一个进程请求资源阻塞时,不是放已获得的资源- 不剥夺:进程已获得的资源不能强行剥夺- 循环等待:若干进程之间形成肉味详解的循环等待资源关系
- 解决死锁的方法 - AA型死锁:使用防御性编程,
if(holding(lk)) painc();- ABBA型死锁:线程按照固定顺序获得锁,消除循环等待条件。给锁编号并检查上锁和解锁的日志 - 死锁比较容易判断的并发问题,因为死锁会导致系统无发展
- 数据竞争:不同的线程同时访问同一段内存,且至少有一个是写
- 并发程序的书写 - 无锁的并发程序很难写对- 用互斥锁保护好共享数据可以实现一切并发程序
- 并发程序 - 互斥锁(lock/unlock):保证原子性 - 如果忘记上锁,则违反原子性(一次做完)导致并发出错。例如t1-t2-t3(ABA)- 条件变量(wzait/signal):保证同步 - 如果忘记同步,则会导致违反执行顺序- 97%的非死锁并发bug都是互斥锁或条件变量
- 当一个十倍程序员的前提是程序中bug极少,需要始终假设自己代码是错误的
- 要善于使用动态程序检测工具,例如linux内核中的动态分析软件sanitizers (可以检查数据竞争和非法访问等)
- 内存越界检查 - Canary机制:牺牲堆栈头尾的一些数据单元作为特殊标记,隔一段时间就检查这些标记,如果被更改,则报错 - msvc中,为初始化的栈为0xcccc(GB2312编码为
烫烫)、为初始化的栈为0xcdcd(GB2312编码为屯屯)
操作系统的状态机模型
写一个操作系统
- 操作系统是程序,程序是状态机,状态机是状态+指令/syscall形成状态流
- 计算机硬件也是一个状态机,而软硬件之间的桥梁是软硬件工程师的约定(手册)
- 计算机的启动(legacy BIOS方式)- 开机,发出一个RESET信号,RESET会初始化计算机硬件的开始状态 - pc初始化指向为内存映射的ROM(0xffff0,跳转到固件的jmp指令),ROM存储了厂商提供的固件- 固件:厂商提供的代码,可以将用户数据加载到内存上,如存储介质上的loader加载器- MBR(启动磁盘的第一个512字节的扇区,末尾是55aa),cpu将mbr中启动程序加载到内存的0x7c00开始处
- 如何理解一个程序,理解程序的状态机变化,即使每执行一条指令状态机的变化
状态机模型的应用
用状态机模型理解物理世界
- 状态+指令/syscall = 确定的下一个状态
- 时间旅行:从一个状态回溯到之前的状态,但是之前的状态会进行分支一个拷贝,从而出现一个平行宇宙
- strace工具可以将程序执行的的每一条指令和syscall按序列出
- gdb每次停下来都是停止在一个状态上,可以使用s走一条语句,或者使用si走一条指令,查看下一个状态
record full打开gdb的记录模式,使用rsi回溯上一条指令。但是难以回溯syscall执行,可以使用非确定指令的结果记录的方式进行回溯这种执行- 初始状态->确定性指令->状态1->非确定性指令->状态2->… - 确定性指令可以通过逆指令执行,实现状态的回溯- 非确定性指令可以通过结果状态的快照,实现状态的回溯
- 性能优化反问 - 现在性能够用吗- 这个需要进行性能优化吗- 性能优化的收益大吗
- gdb会在指令间打断点,即入侵程序的指令来形成执行的历史。如何减少程序入侵 - 程序在中断后,内核可以看到程序中断前的状态(profile软件)
操作系统上的进程
- 操作系统的内核启动:CPUReset->Firmware(ROM固件)->Boot loader ->启动内核kernel start()->创建第一个进程init
- 操作系统为程序创建的API - 进程(状态机)管理:状态机的创建fork、改变execve、退出exit- 存储(地址空间)管理:mmap虚拟地址空间- 文件(数据对象)管理 - 文件访问管理:open、read、write、close- 目录管理:mkdir、link、unlink
- 程序就是状态机,所以操作系统在完成启动后,会通过init创建操作系统的第一个进程(也是一个状态机)
- fork是状态机整体的复制——拷贝父进程状态,通过fork创建的状态与父进程的状态完成一样(内存的字节都一样,但是地址不同),除了fork的返回值——进程的标识编号。 - fork完成后,即存储了多个进程,状态机变成了并发状态机模型
本质:操作系统是状态机的管理者,虚拟化就是多个状态机复用一个物理机- fork bomb
fork(){ fork | fork &// fork管道给fork}; fork - 状态机包含了所有进程和计算机软硬件资源的状态。而每个状态机由于指令/syscall执行导致出现新的状态机,这些状态机形成了执行流
- fork 无情的复制机器:会将进程所有的内存和寄存器复制一份(包括库函数的内部状态)
- 标准输出stdout - 输出对象是终端,则为line buffer,以’\n’作为缓冲区一次输出标志- 输出对象是pipe/file,则为full buffer, 写满4096B才会将输出一次
- 程序是状态机,正在执行的程序是正在运行的状态机,fork是创建状态机的副本
- execve(环境变量):将状态机重置成某个状态,环境变量是重置状态机的参数
- 环境变量:应用程序的执行环境,在linux下可以使用env命令查看 - PATH:可执行文件的搜索路径- PWD:当前路径- HOME:home目录- DISPLAY:图形输出- PS1:shell的提示符
- 所有的进程的创建都需要fork,所有的进程启动都需要一直reset即execve系统调用进行设置环境
- _exit(int status) - 销毁当前状态机,并允许有一个返回值- 子进程终止会通知父进程
- exit的几种写法 - exit(0):会调用atexit,终止当前进程- syscall(SYS_exit, 0) - 执行exit系统调用终止当前线程- 不会调用atexit- _exit(0):执行exit_group系统调用终止整个进程
系统调用和shell
- 计算机系统的构建 - 硬件NEMU:从CPUReset开始执行指令- Firmware固件:加载操作系统- 操作系统:状态机的管理者 - 初始化第一个进程- 执行系统调用
- shell是操作系统内核外面的中间壳,是人机交互的中间层。可以将用户指令翻译称为系统调用的语言
- 使用
man sh读以下shell的手册 - shell中的管道实质是将命令翻译成一颗语法树,然后再将将叶子节点翻译成系统调用 - 作用:父子进程可以共享管道,因为是一个完整的复制关系
- 好的shell,如fish(自动补全的shell)、zsh。加入bert模型
- 任何人机交互的程序都应该使用大语言模型进行重构
- linux 的工具 - zsh:兼容bash的shell- tmux:shell分屏- strace:追踪系统调用的分析工具
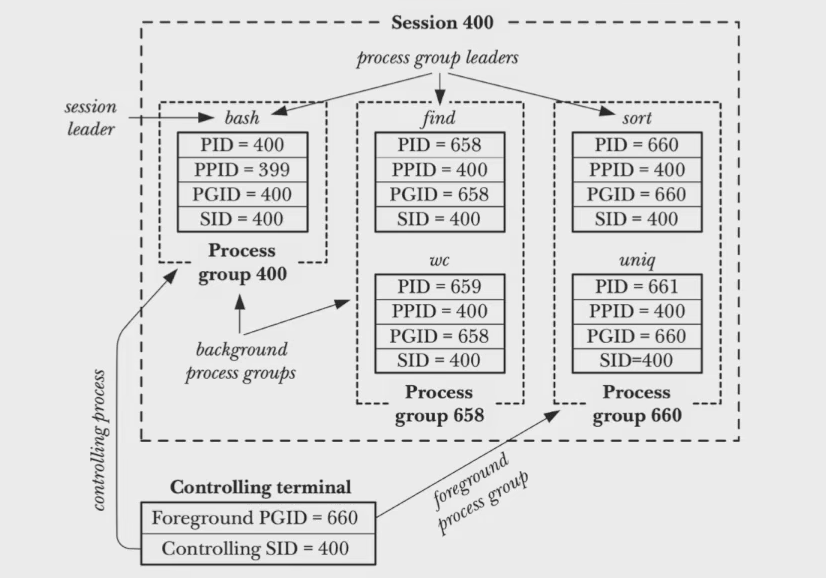
- 启动一个shell - 打开一个session:内部是很多个进程组process group,fork前后的进程都同属于一个进程- controlling terminal:会建立一张进程关系表,即一个shell- 如果一个信号被terminal产生,则会相应的发送给所有的进程组
- 看完linux的sh手册man sh
- 一个功能完整的shell使用的操作系统对象和API - 控制结构 - session- process group- controlling terminal- 文件描述符 - open- close- pipe- dup- read- write- 状态机管理 - fork- execve- exit- wait- signal- kill- setpgid- getpgid
什么是可执行文件
- 可执行文件的使用通过系统调用execve实现,
execve(可执行文件,...)- 前提:execve用于状态机的重置,重置的数据来源于可执行文件- 本质:可执行文件是一个可迁移的数据结构,描述了状态机(寄存器R+内存M)的初始状态,elf加载器将execve中第一个参数指向的文件Reset状态机- 寄存器: - 大部分由ABI决定,操作系统负责设置,如初始的PC- 地址空间 - 二进制文件+ABI共同决定的,如argc和argv的存储 - 文件可执行的前提 - 具有可执行权限x- 加载器能识别的可执行文件
- linux的执行方式 - 二进制文件a.out(不赞成)- ELF(Executable Linkable Format)- She-bang
- GNU binutils查看、生成、修改二进制文件的工具 - 生成可执行文件 - ld(linker)、as(assembler)- ar、ranlib- 分析可执行文件 - objcopy/objdump/readelf- addr2line/size/nm- 可执行文件的运行时状态 - gdb
- 调试信息 - 将一个assembly(机器)状态映射到C世界状态的函数 - 通过一个Turing Complete的指令集DW_OP_XXX- 可以执行"任意计算"将当前计算状态映射回C- 不完美 - 对现代语言支持有限- 编译器也无法保证调试信息
- 状态机器的编译 -
C的语句状态机通过语句进行转移到下一个C语句状态机-指令状态机通过指令/syscall进行转移到下一个指令状态机- 汇编器将指令状态机翻译成.o文件(描述指令状态机),链接器将所有的.o文件约束成.out文件。(约束如在一个文件中只存在的声明部分,而在另一个文件中存在的定义部分进行事后链接)- gcc将语句状态机转化成指令状态机,而gdb就是将指令状态机映射回C状态机。汇编程序assembly将指令状态机转换成二进制的数据结构和约束条件 - 将要链接的未知符号的地址S+A-P=S-(P-A) - P-A就是现在的PC值,就是跳转的目标地址减去现在的PC
- 面向问题,而不是面向细节
动态链接和加载
- 可执行文件:描述状态机初始状态的数据结构 - 不同于内存的数据结构,指针都被偏移量所代替- elf定义:/usr/include/elf.h
- 文件加载器file loader - 解析数据结构 + 复制到内存 + 跳转- 创建进程运行时的初始状态
- boot loader的作用 - 引导扇区内容:512B MBR + 1024B main argc + kernel(elf)
- 动态链接的原因:如果每个可执行文件都有所有库函数的拷贝,会极大的浪费内存空间 - 动态链接库版本无关性:调用者遵守基本的约定,与库函数的版本无关- 原因:在程序运行时,找到编译好的库函数进行动态链接,即运行时才进行链接
- 动态链接库的功能 - load(lib)一个动态链接库- import(sym)一个符号- export(sym)一个符号- dsym(sym)引用一个外部符号
- 动态链接本质就是查表,先在符号表中的符号地址填入0,动态链接符号后,根据符号表中的符号地址进行间接跳转
- elf中字符串:将所有的字符串常量存放在常量池,统一的通过“指针”进行访问
- 符号表GOT和PLT:统一静态与动态链接
- 符号表GOT(global offset Table) - 作用 :是Linux
ELF文件中用于定位全局变量和函数的一个表 - PLT(Procedure Linkage Table,过程链接表) - 作用:Linux ELF文件中用于延迟绑定的表,即函数第一次被调用的时候才进行动态绑定- 优点:延迟绑定只绑定被调用的函数,没用过就不进行绑定
- 如果系统开启了内存布局随机化ASLR,程序每次运行动态链接库的加载位置都是随机的,就很难通过调试工具直接确定函数的地址
Xv6 代码导读
UNIX - v6的现代版克隆: - 基本的工具集和shell- 命令执行、管道、重定向- 支持多处理器- 支持RISC-V
xv6中基本的系统调用
System callDescriptionint fork()创建一个进程,并返回子进程的PIDint exit(int status)终止当前进程,状态报告为等待int wait(int *status)等待子进程退出,退出状态为status,并且返回子进程PIDint kill(int pid)终止进程PID,返回0或-1(错误)int getpid()返回当前进程的PIDint sleep(int n)暂停n个时钟周期int exec(char *file, char *argv[])将文件加载到内存执行并用argv初始化环境,只有错误才返回int open(char *file, int flags)打开一个文件,标志为读/写,返回该文件描述符int write(int fd, char *buf, int n)从bufffer到文件描述符指定的文件中写入n个字符,并返回nint read(int fd, char *buf, int n)从文件描述符指定的文件中读取n个字符写入到bufffer,返回读入的字节数,如果在文件末尾则返回0int close(int fd)释放打开文件的文件描述符int dup(int fd)dup函数创建一个新的文件描述符,该新文件描述符和原文件描述符指向相同的文件、管道或者网络连接int pipe(int p[])创建一个管道,在p[0]和p[1]中放置读/写文件描述符。int chdir(char *dir)改变当前文件目录int mkdir(char *dir)创建一个新的文件目录int mknod(char *file, struct stat *st)创建一个设备文件int fstat(int fd, struct stat *st)将打开文件fd的信息放入st中int stat(char *file, struct stat *st)将有关命名文件fd的信息放入st中int link(char *file1, char *file2)为文件file1创建另一个名字file2(软连接)int unlink(char *file)删除一个文件读xv6的手册,可以作为操作系统的实践教学
工具比什么都重要
vscode的执行需要配置命令脚本,也可以在terimal中输入
gdb的源代码对照的按行调试 -
set pegination off-layout srcgdb tui
Xv6 上下文切换
- 为什么死循环不能使计算机卡死 - 硬件会发生中断切换到内核态执行- 内核态可以切换到另一个进程执行
- 操作系统的定义 - 每个程序加载到内存后成为进程,进程的执行是一种状态机的改变- 操作系统是状态机的集合- 单cpu上的操作系统具有多个进程,可以通过时分复用进行处理
- 协程是一种函数对象,可以设置锚点做暂停,然后再该锚点恢复继续运行 - 同步:因为协程本质是函数,调用协程后原来的地方就会被阻塞,协程处理完了才返回结果,这是天然同步的- 并发:遇到阻塞条件时候,把cpu让给别的协程,等条件满足了再通过中断可恢复的特性再继续运行,就实现了并发
- 通过协程可以在用户态下,实现一个操作系统在用户态的中断。因为协程可以实现用户态下的状态机转换
- 进程对于持有的内核区代码是不可见的,只能通过系统调用与操作系统进行交互。
- 文件描述符是进程状态的一部分
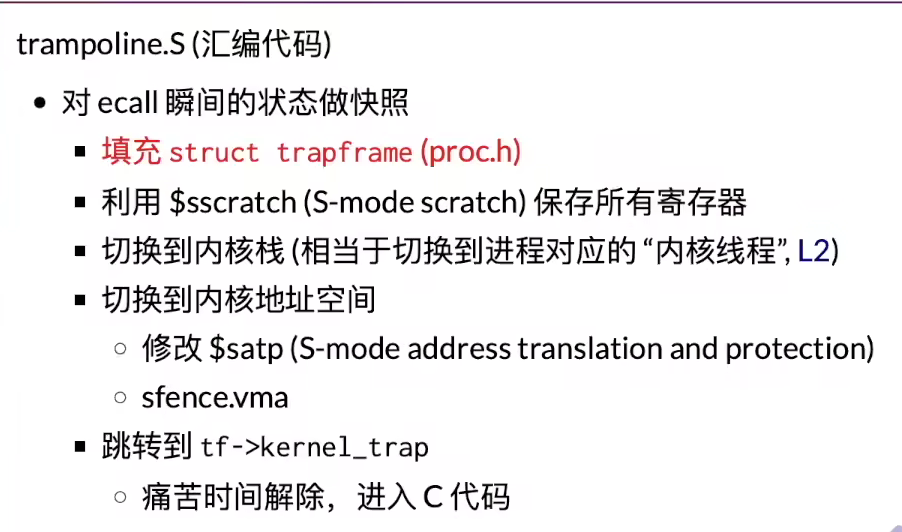
- 中断和系统调用实际将进程的状态进行保存,这是通过寄存器和内存的虚拟化实现的
- 操作系统的上下文管理和切换 - 系统调用:操作系统开始真正处理系统调用/中断时- 状态机封存:所有进程的状态机都可以封装到操作系统中- 状态机器处理:所有进程的状态机使用数据结构task_struct数组进行管理,操作系统可以通过数据结构访问每一个进程的状态机,并修改- 调度并恢复:操作系统可以通过schedule将一个进程的状态机(寄存器和内存)恢复到CPU
- 操作系统是状态机的管理者 - 再xv6中$stap控制了状态机的内存访问,内核通过分页映射机制实现了虚拟内存到物理内存的转换- 操作系统持有所有的物理页面(通过$stap和CR3进行任意映射)
处理器调度
- 时分复用中断机制- 处理器以固定的频率进行中断- 中断/系统调用返回时,可以自由选择进程/线程执行
- 有很多进程,如wait I/O进程、等待系统调用的进程、可能被中断的进程。那应该选哪个进程调度到处理器上运行- 时间片轮转:保证了公平,但是可能对于交互不好- 优先级调度:使用nice值标识进程的好坏,越好的人越愿意将CPU让给别人(帮助别人总是最先得到?idea),实时操作系统通常是完全的优先级调度- 通常的优先级调度:nice值低的进程得到cpu机会更多,但是所有进程都能得到CPU可以发展- 动态优先级别
- 动态优先级MLFQ- 系统自动设置优先级- 设置若干严格时分复用的队列,每个优先级对应一个队列- 用完时间片的,将优先级调低。让出时间片,将优先级调高- 问题:每次再时间片快结束时候,就让出CPU。(看起来是好人,实际是坏人)- 可以隔一段时间,进行重置或者执行完全的时间片轮转
- 现代linux调度器CFS(complete fair scheduling)- 用红黑树维护一个有序集合- 原则: - 公平的保证:谁亏给谁补,操作系统尽可能的让每个进程都获得同样的运行时间- 优先级的保证:每个进程执行相同的1ms,nice值大的会执行10ms,nice值小的会执行5ms。即通过nice作为系数增加的虚拟时间,统一进程在运行时间上的调度策略- 问题1:进程的运行中出现fork,子进程会直接继承父进程的状态。不会减少,因为如果减少,可能一直fork出现饥饿- 问题2:如果出现状态慢了极大,则需要补充10秒,则会导致其他进程卡顿- 问题3:vruntime是一个一直增长的整数,如果出现溢出,会导致溢出进程从极大变成极小。
//比较相对大小boolless(u64 a, u64 b){return(i64)(a-b)<0;}- 问题4:低优先级的获得互斥锁,但是运行时间少,所以释放互斥资源就会慢。解决:当阻塞高优先级的进程的时候,优先级提升到和阻塞优先级一样高 - 调度策略考虑的两个维度- 同等优先级考虑公平性- 不同优先级考虑优先级
- 一个进程可能与其他进程进行交互,相互合作完成一个事情。- 高优先级:pv操作一直让出cpu,导致获得大的运行权限- CFS:具有运行时间的记账,可以相对的公平
- 多核心多线程的计算机系统- 无法实现真正的公平,A用户占用一个进程,B用户并行执行占用1000个线程,则A用户可能会饥饿
- 轻量级虚拟化容器docker,创造操作系统中的操作系统- cgroup以进程组为单位管理资源,解决多用户的cpu分配不平均问题
- dark silicon时代的困境(基本计算机模型的改变)- 功率和散热无法同时支撑所有的电路工作,总有一部分要停下来- 解决:大小核异构技术,小核功耗小,大核功耗大
- 调度器随着硬件的异构,发生调度算法的基本假设不断改变。甚至出现CPU hot plug(热插拔)
- 调度器是一个中央资源向下分配的问题
- 建模 - 预测 - 决策,每个进程对自己的需求是最清楚的,所以应该每个进程自己提出调度策略
- 机制是可以做出来的,但是策略是一个做的好的问题。
持久化
极限速通操作系统
- 数据竞争:多个进程同时访问一个遍历,并且至少一个是写的。
- 原子执行的宏
#defineatomic\for(int __i =(lock(),0); __i <1; __i++,unlock())// 具体执行// 用法:atomic { body }// lock();// i = 0;// check i < 1 -> yes// body// i++// ublock();// check i < 1 ->no, exit loop - 在每个代码模块都进行assert判断
#ifdefAGGRESSIVE_CHECKassert(conditionJudge());#endif// 示例#include<stdio.h>#defineFLAG1intmain(int argc,char*argv[]){#ifdefFLAGprintf("hello world");// 如果FLAG不进行宏定义为1就不会打印#endif} - 使用技巧尽可能的增加assert进行检查,没有使用技巧尽可能的写的简单。炫耀技巧的地方就是最容易错误的地方
- 对自己的所有代码给最大的不信任
- 每一个 CPU 核心都会有一个 idle 进程,idle 进程是当系统没有调度 CPU 资源的时候,会进入 idle 进程,而 idle 进程的作用就是不使用 CPU
- 写代码写两个版本 - 基本代码(在脑袋中清晰):要求简单明确- 高级代码(写代码要检查):要求性能- 两个代码在输入和输出上应该是等价的
持久化:1-Bit 数据的存储
- 牺牲了掉电后的状态丢失,换取使用电路的高速度
- 磁芯内存写入数据:行选通和列选通,行列的交点的电路最大超过阈值,将交点置为1
- segmentation fault的以前的含义core dumped(核心已转储):程序出错,将内存的状态转移到外存
- 内存和寄存器的状态失去,但是持久存储的数据仍然存储
- 存储设备通常是按照
块进行存储的,一般为4KB - 光盘:通过
坑进行持久化存储,eg:CD是只读的 - SSD:通过施加正反向的电压进行电子的转移,而读盘读取电子的状态。容量越大速度越快 - 可能充电多会导致电子无法完全排空,导致出现坏点。- 通过控制器进行地址映射,进行均匀的写,或者屏蔽坏点
- 因为硬盘的逻辑映射,所以即使磁盘格式化后(不写满),logic block被覆盖,但是physical block仍然可能存储了数据
- 软件安装包定义了程序运行的初始状态
输入输出设备
- I/O设备:使计算机能够感知外部状态,对外实施动作。能和CPU交换数据的设备/控制器
- 设备是交换信息的接口,交换的是状态/命令/数据
- 串口UART:可进可出的字节流
- 键盘控制器 - 硬编码到两个I/O port:
0x60data,0x64status/command - 设备本质是通过设备寄存器的读写,与CPU进行交互
- 80386:cpu通过一个多路选择器mux与多个设备进行连接
- 现在架构:cpu连接一个I/O设备(总线),I/O设备连接多个设备插槽,CPU告知I/O设备指令和访问地址,I/O设备负责与具体设备进行交互。所有设备都在cpu的地址空间中,所以cpu可以通过总线访问
- CPU有一个中断引脚 - 收到某个特定的电信号会触发中断 - 保存5个寄存器(cs、rip、rflags、ss、rsp)- 跳转到中断向量表的对应项进行执行- 系统中的其他设备可以向中断控制器进行连线
- DMA:一个专门执行memcpy程序的CPU,通常直接将DMA控制器连接到总线和内存上支持几种 - memory->memory- memory->device(register)- device(register)->memory
- 将
单调的工作给一个单独的设备进行处理,如早期GPU只能执行程序到设备图形的映射 - 图形学:任何n边形都可以分解成n-2个三角形
- 下一个时代是异构计算的统一化的时代
设备驱动程序
- 协处理器:用于处理特殊任务的微处理器,如GPU、I/O总线···
- 将设备进行抽象 - 字节流设备,如terminal、打印机- 块设备,如硬盘
- linux中将设备抽象为文件 - read:从设备的某个指定的位置读出数据- write:向设备某个指定位置写入数据- ioctl:读取/设置设备状态
- 设备驱动程序:将程序的通用的系统调用序列通过翻译成对应的设备的驱动程序
- 设备驱动程序是一种内核代码,一般是厂商,但是是内核数量最大、质量最差的代码
- 状态机进行的
取指令——译码——执行 - GPU的架构SMT - 所有cpu都有各自的寄存器组,但是共享内存和pc指针。- pc指针的共享可以
- 磁盘的访问特性 - 以数据块为单位进行访问 - 传输有最小单元,不支持任意的随机访问- 最佳传输模式与设备相关- 大吞吐量:使用DMA进行数据传输- 应用程序不直接访问 - 访问者通常是文件系统- 大量并发的访问
- 文件系统就是在block I/O API上构建的持久化的数据结构 10.设备驱动的核心是
将read/write/ioctl翻译成设备可以听得懂的语言
文件系统的API
- 设备在应用程序间共享 - 对于磁盘来说,block不是一个好的抽象
- 磁盘、所有的应用程序···都是字节序列,可以将磁盘抽象成应用程序可以持有的虚拟磁盘
- 文件系统:设计目标 - 提供合理的API使多个应用程序可以共享数据- 提供一定的隔离,使错误程序的伤害不能扩大
- 存储设备(字节序列)的虚拟化 - 磁盘是一个I/O设备,是能读/写的字节序列- 虚拟磁盘是文件,是能读/写的动态字节序列
- 允许任何目录mount(挂载)一个设备代表的目录树 - linux下的mount工具是mount系统调用的一个封装
- linux文件的挂载 - 文件是磁盘上的虚拟磁盘,挂载文件是在虚拟磁盘上虚拟出来的虚拟磁盘- 回环设备loopback device:可以将文件映射为虚拟的块设备。这个虚拟的块设备可以被当作一个普通的物理设备来访问。
- linux下每个文件都是一个虚拟的磁盘 - 硬链接:存储直接访问虚拟磁盘的指针- 软连接: 在文件里面存储一个跳转提示(即使跳转目标不存在),是一个有向图
- 每个进程的都有一个工作目录,使用
pwd进行查看 - 系统调用open会返回一个文件描述符fd,这个文件描述符会指向虚拟磁盘
- 系统调用read和write都是从指定文件描述符fd中读或写指定大小的数据块到指定buf中,但是读写完后fd会指向数据末尾
- fork子进程时,会同时复制父进程的fd。当父子进程同时通过这个fd进行访问虚拟磁盘时,会有一个中间的offset进行记录。防止出现父子进程都从都写出现交替覆盖的情况。
- 文件系统的两大部分 - 虚拟磁盘(文件) - mmap、read、write、lseek、ftruncate- 虚拟磁盘的命名管理(目录树和链接) - mount、chdir、mkdir、rmdir、unlink、open
FAT和UNIX文件系统
- 数据结构课程的假设 - 具有随机存取的存储器- 每条指令都是O(1)的
- 文件系统自底向上的基本实现 -
balloc和bfree的实现 - balloc返回一个空闲可用的数据块- 释放一个数据块-文件( 块的array)的实现-目录的实现 - 文件系统File Allocation Table(FAT) - balloc和bfree的实现: - 每个节点都有各自的指针域: 实现简单,但是每块可能不是 2 k 2^k 2k,单纯的lseek需要遍历整个链表- 将指针域集中存储:指针域具有局部性,并可以放到内存中进行缓存。但是指针域破坏后,出现文件系统损坏。(进行备份可以解决这个问题,这个指针域表称为FAT)- 目录的实现 - 目录 = 32byte定长目录项的集合
- 定义指定字节数量的字符
structBPB{ u8 BS_jmpBoot[3];// 3个字节 u16 BS_byte[8];// 16个字节... u8 padding[100];};// 健壮性检查#ifdefASSERT_CHECKassert(sizeof(structBPB)==119);#endif - FAT - 适合小文件,无法随机存取,所以适合大文件- 会维护若干个FAT副本,防止数据破坏
- 高性能文件系统EX2 - 文件系统的元数据节点中的数据域,使用多级目录进行索引。 - 例如每个块4KB可以存储1024条索引项,小于4KB的文件,一个块就可以直接所有。而大文件如4kB*1024的可以先索引一个索引块,然后用这个索引块进行二级索引文件- 如果出现存储文件元信息的inode破坏,会出现大量文件的丢失

持久数据的可靠性 (RAID; 崩溃一致性; FSCK 和日志)
- 数据结构的假设 - 内存可靠并且可以接收断电的数据丢失- 持久数据是不能接收丢失的
- 磁盘冗余阵列RAID(虚拟化的力量) - 拥有多个不太可靠的物理磁盘,而共同组成了一个可靠性高的但容量稍小一些的虚拟磁盘- 容错概率是指数级的增长- 反向虚拟化 - 进程:把一个cpu分时虚拟成多个虚拟的cpu- 虚拟内存:把一份内存通过MMU虚拟成为多个地址空间- 文件:把一个存储设设备虚拟称为多个虚拟磁盘- 镜像分储:增加读,降低写。但是容错 - 将数据分成两个部分,分别存储不同的两块的磁盘- 读效率翻倍:可以用满两个磁盘的带宽进行读- 写效率降低:一份写要分别写入两个磁盘
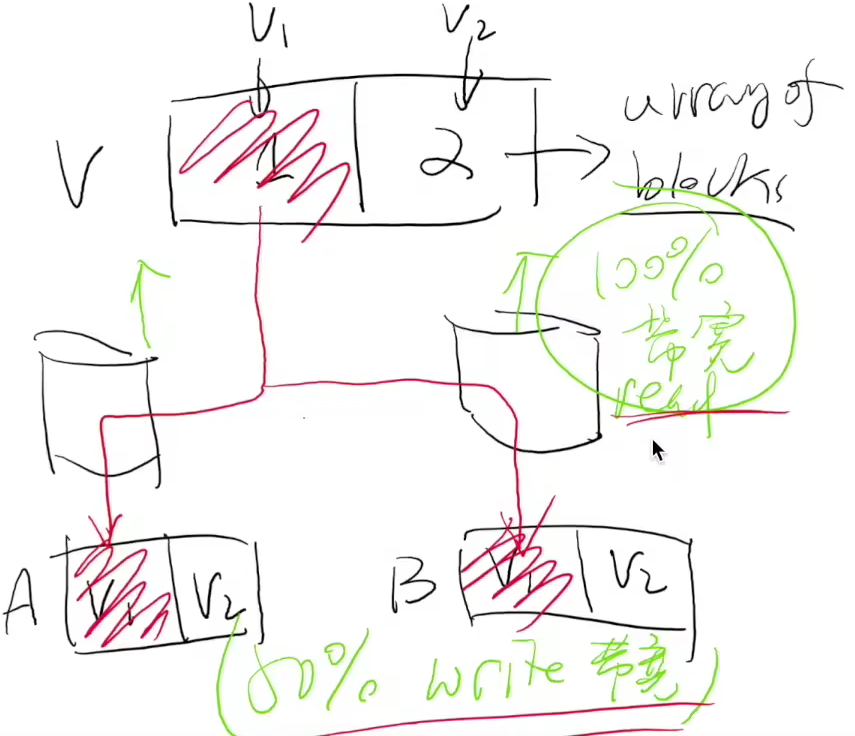 - 交叉合并:扩容扩速但不容错 - 将两个盘内区块交错合并为一个虚拟盘,顺序读写时,可以分别占用两块磁盘的带宽
- 交叉合并:扩容扩速但不容错 - 将两个盘内区块交错合并为一个虚拟盘,顺序读写时,可以分别占用两块磁盘的带宽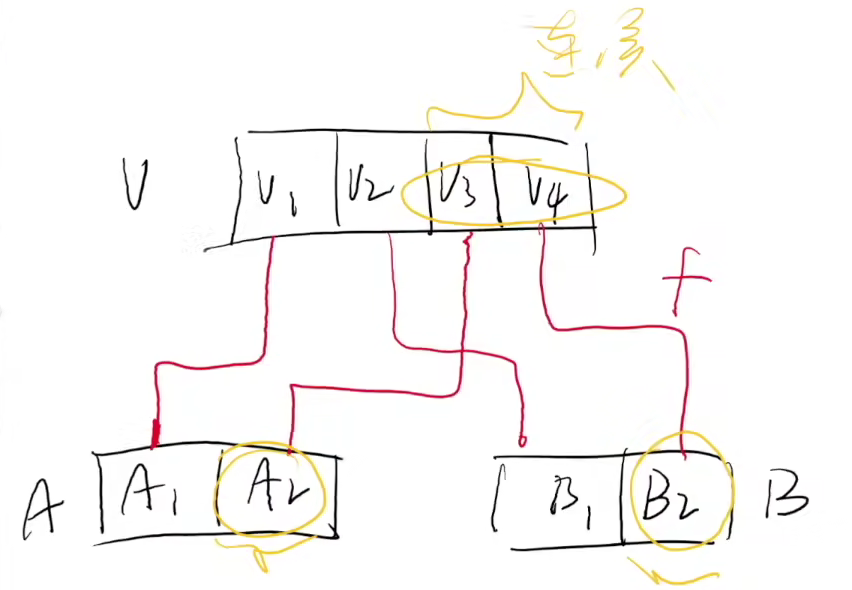 - 底层使用镜像分储,高层使用交替合并。
- 底层使用镜像分储,高层使用交替合并。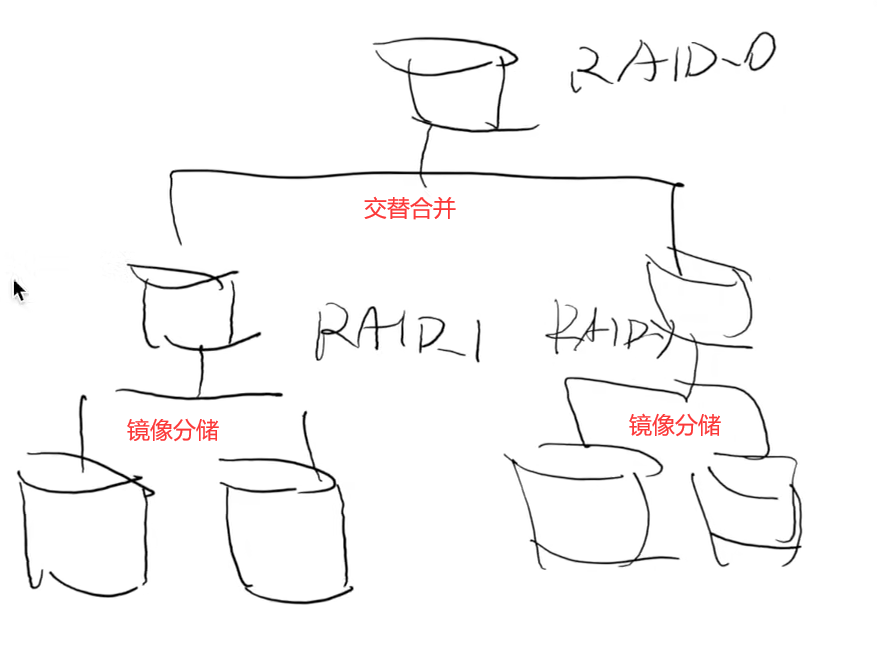 - RAID-4将镜像存储的数据划分为bit位 - A ⊕ A = 0 A\oplus A = 0 A⊕A=0,自身的异或值为零。- 如果有一个bit错误,则让该部分bit数组自己异或自己,即可知道错误位- 通过一块磁盘存储,异或值。如果其中一块磁盘损坏,可以进入recovery模型,进行快速计算和恢复- eg:99块存数据,一块存校验和。读写速度提高99倍,容忍一块磁盘的损坏。但是随机写的性能是一块磁盘的1/2。- RAID-5将校验部分交替存储到每个盘中,提高读取速度
- RAID-4将镜像存储的数据划分为bit位 - A ⊕ A = 0 A\oplus A = 0 A⊕A=0,自身的异或值为零。- 如果有一个bit错误,则让该部分bit数组自己异或自己,即可知道错误位- 通过一块磁盘存储,异或值。如果其中一块磁盘损坏,可以进入recovery模型,进行快速计算和恢复- eg:99块存数据,一块存校验和。读写速度提高99倍,容忍一块磁盘的损坏。但是随机写的性能是一块磁盘的1/2。- RAID-5将校验部分交替存储到每个盘中,提高读取速度 - 云计算:将多个不可靠的计算机,合并成为一个又大、又快、又可靠的云计算中心
- 崩溃一致性(Crash Consistency) - 数据的写入要并行或串行执行很多步骤,要进行步骤的安排和算法进行保证数据可靠性
- 磁盘调度算法导致,磁盘可能会不按照用户代码规定的顺序写入,而是进行乱序写入(先写入离磁头近的)
- 状态机的历史 - 每一个状态- 起始状态和每次状态转换的指令
- 历史文件操作的记录:日志 - 当文件操作时,先将操作记录到日志中- 更新数据结构- 崩溃后,进行日志检查,将所有未完整写入的操作重做一遍(每个操作序列做一个操作完成标记)
Xv6文件系统的实现
- 通常文件系统是以4KB为单位访问的
- 磁盘的数据结构 - 目录(数据块的索引表)- 文件(虚拟磁盘块集合)- 文件描述符(磁盘中的偏移量)
- 数据的集中可以更好的利用局部性
- vscode的使用 - ctrl + p 输入# 要查找的标号名称
- 理解一个代码最好的方式是看它的执行流程
- 写一个gdb的脚本,不需要每次调试设置环境
- 文件系统的缓冲池 - 将要读取的磁盘块加载到内存缓冲区中,然后从缓冲区中对磁盘块的镜像进行读写操作- 当写入的镜像磁盘块时,将该磁盘块置为dirty。可不用立即将磁盘块写入到磁盘中,等待多个磁盘块一起写回- 使用日志保证系统crash后的数据一致性
- 先写日志,再保证日志落盘,再进行操作
现代存储系统
- 表格:每一行都是一个对象,每一列都是对象某个属性的抽象
- SQL描述出“你想做什么”,数据引擎帮你想办法做到
- 数据库把数据的访问和应用程序的逻辑分离,可以提供原子性
- SQL的原子性
// 可以保证中间操作的原子性BEGIN WORK;INSERT INTO students VALUES(...);INSERT INTO students VALUES(...);INSERT INTO students VALUES(...);COMMIT; - 编译优化:将语句编译成等价的更快的机器语言
- 虚拟磁盘上的数据结构 - 把SQL查询翻译成read,write, lseek,fsync的调用- 并发控制(事务处理)
- cmu的15445,使用c++17写一个数据块
- raft - 基本概念 - 一致性:在分布式系统中的多个节点在状态上达成一致,但是现实场景中由于系统崩溃等原因可能难以完成- leader身份:负责处理客户端的交互请求、日志操作等,一般一个分布式系统中只有一个Leader- follower身份:类似选民,完全被动,在探测不到leader存在时,follower在超时时间过后会转化成candidate- candidate身份:候选人身份,可以被选为一个新的leader- term:选举任期- Raft选举的三个规约 - 超过半数投票- 节点只能响应任期号大于或等于自己任期的请求- 同一个任期内只能选举一次- 选举情况:A随机时间最短,将term+1并转换为candidate,然后投自己一票。并行给其他节点发送投票,并等待其他节点的回复。 - 第一种:A收到大部分的投票(都包含自己的一票),则赢得选举成为leader,并立刻告诉其他所有节点- 第二种: 被告知别人已经当选,则会自行切换到选民follower身份- 第三种:所有节点没有获得大部分投票,都转变为候选人,继续发起投票,直到产生leader为止- 优点 - 通过election timeout一定程度上解决了候选人争抢选票导致选举时间过长的问题- Raft比Paxos算法更容易理解,且更容器工程化实现
- 分布式友好的数据模型key-value - put(k, v)操作:可以将(k, v)直接追加到文件末尾,具有顺序性- get(k, v)操作:需要遍历整个文件,效率差
- 分层存储,读的多的在上面,读的少的放到下一层
android操作系统
- 前端应用比较重要的:网络和人机交互
- 对象使用栈进行存储
- 如何理解一个技术,需要从解决的
问题和执行过程进行理解 - 多线程与锁:会产生低优先级线程持有资源的锁,而高优先级线程进行等待的情况
- 后台应用程序通常优先级低于前台的交互程序
课程总结
数理逻辑通过特定逻辑电路构建体系结构,操作系统通过端口控制体系结构
少年,我观你骨骼清奇,颖悟绝伦,必成人中龙凤。不如点赞·收藏·关注一波
参考博客
- 待定引用
- 待定引用
- 待定引用
- 待定引用
- 待定引用
- 待定引用
- 待定引用
- 待定引用
版权归原作者 逆羽飘扬 所有, 如有侵权,请联系我们删除。