
这篇文章是SRResnet的升级版——EDSR,其对网络结构进行了优化(去除了BN层),省下来的空间可以用于提升模型的size来增强表现力。此外,作者提出了一种基于EDSR且适用于多缩放尺度的超分结构——MDSR。
EDSR在2017年赢得了NTIRE2017超分辨率挑战赛的冠军。
参考目录:
①深度学习端到端超分辨率方法发展历程
②【图像超分辨】EDSR
③源码(Pytorch)
④源码(Facebook-torch)
⑤源码(Tensorflow)
Enhanced Deep Residual Networks for Single Image Super-Resolution
Abstract
- 作者推出了一种加强版本的基于Resnet块的超分方法,它实际上是在SRResnet上的改进,去除了其中没必要的的BN部分,从而在节省下来的空间下扩展模型的size来增强表现力,它就是
EDSR,其取得了当时SOAT的水平。 - 此外,作者在文中还介绍了一种基于EDSR的多缩放尺度融合在一起的新结构——
MDSR。 - EDSR、MDSR在2017年分别赢得了NTIRE2017超分辨率挑战赛的冠军和亚军。
- 此外,作者通过实验证明使用 L 1 − L o s s L1-Loss L1−Loss比 L 2 − L o s s L2-Loss L2−Loss具有更好的收敛特性。
1 Introduction
近几年来,深度学习在SR领域展现了较好的图像高分辨率重建表现,但是网络的结构上仍然存在着一些待优化的地方:
- 深受神经网络的影响,SR网络在超参数(Hyper-parameters)、网络结构(Architecture)十分敏感。
- 之前的算法(除了VDSR)总是为特定up-scale-factor而设计的SR网络,即scale-specific,将不同缩放尺度看成是互相独立的问题,因此我们需要一个统一的网络来处理不同缩放尺度的SR问题,比如 × 2 , 3 , 4 \times 2,3,4 ×2,3,4,这比训练3个不同缩放尺度的网络节省更多的资源消耗。
针对第一个网络结构问题,作者在SRResNet的基础上,对其网络中多余的BN层进行删除,从而节约了BN本身带来的存储消耗以及计算资源的消耗,相当于简化了网络结构。此外,选择一个合适的loss function,作者经过实验证明
L
1
−
L
o
s
s
L1-Loss
L1−Loss比
L
2
−
L
o
s
s
L2-Loss
L2−Loss具有更好的收敛特性。
Note:
- MSE就是典型的 L 2 − L o s s L2-Loss L2−Loss。
针对第二个多缩放尺度问题,作者用2种不同的方式去处理:
- 使用低缩放尺度( × 2 \times 2 ×2)训练之后的模型作为高缩放尺度的初始化参数,结果取得很好的表现,说明不同尺度之间是有内在相关联系的。
- 作者设计以了一个可以结合多尺度的SR网络MDSR,除了网络的头部和尾部为各个缩放尺度独立之外,中间部分是共享网络。这种多尺度SR网络具有和单一缩放网络相近的表现力,且相比 n n n个单一网络, n n n个尺度相结合的MDSR消耗更少的资源。
EDSR和MDSR将在标准测试数据集上做测试,分别是Set5、Set14、B100、Urban100以及新的数据集DIV2K。结果显示两种算法在PSNR/SSIM上都取得了SOAT的表现,并在NTIRE2017超分大赛上包揽冠亚军。
2 Related Works
略
3 Proposed Methods
本节将正式开始介绍一种增强版本的SRResNet——
EDSR
(一种single-scale网络),它通过移除了适合分类这种高级计算机视觉任务而不适合SR这种低级计算机视觉任务的BN层来减少计算资源损耗。
除此之外,本节还会介绍一种集合了多尺度于一个网络中的multi-scale超分网络——
MDSR
。
Note:
- BN不适合超分任务的原因:点这里。
3.1 Residual blocks
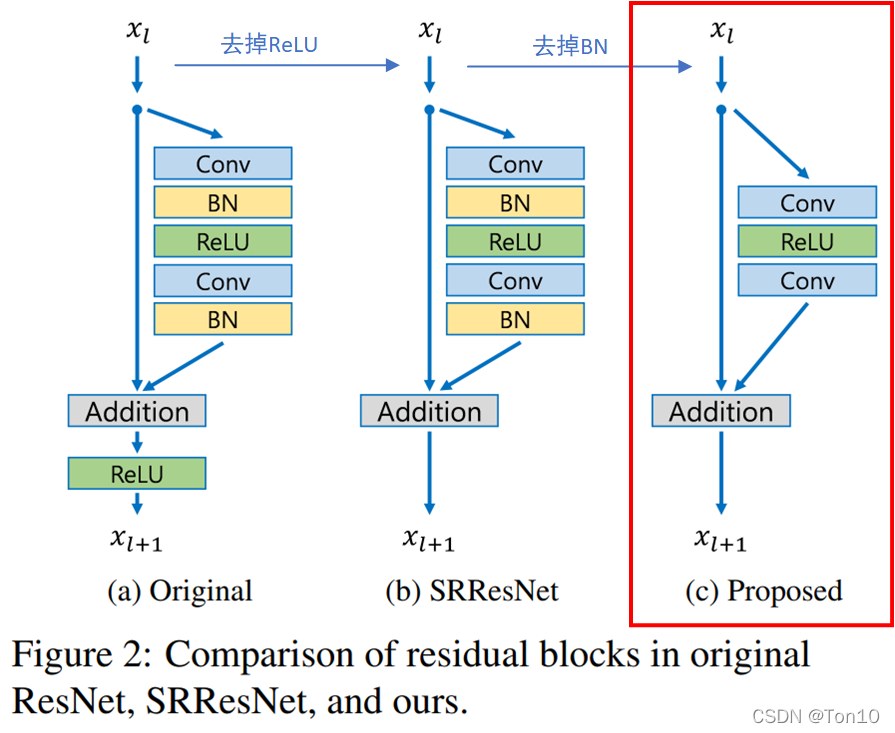
移除BN有以下三个好处:
- 这样模型会更加轻量。BN层所消耗的存储空间等同于上一层CNN层所消耗的,作者指出相比于SRResNet,EDSR去掉BN层之后节约了 40 % 40% 40%的存储资源。
- 在BN腾出来的空间下插入更多的类似于残差块等CNN-based子网络来增加模型的表现力。
- BN层天然会拉伸图像本身的色彩、对比度,这样反倒会使得输出图像会变坏,实验也证明去掉BN层反倒可以增加模型的表现力。
3.2 Single-scale model
EDSR是SRResNet的增强版本,是一种基于上图红框所示的残差块。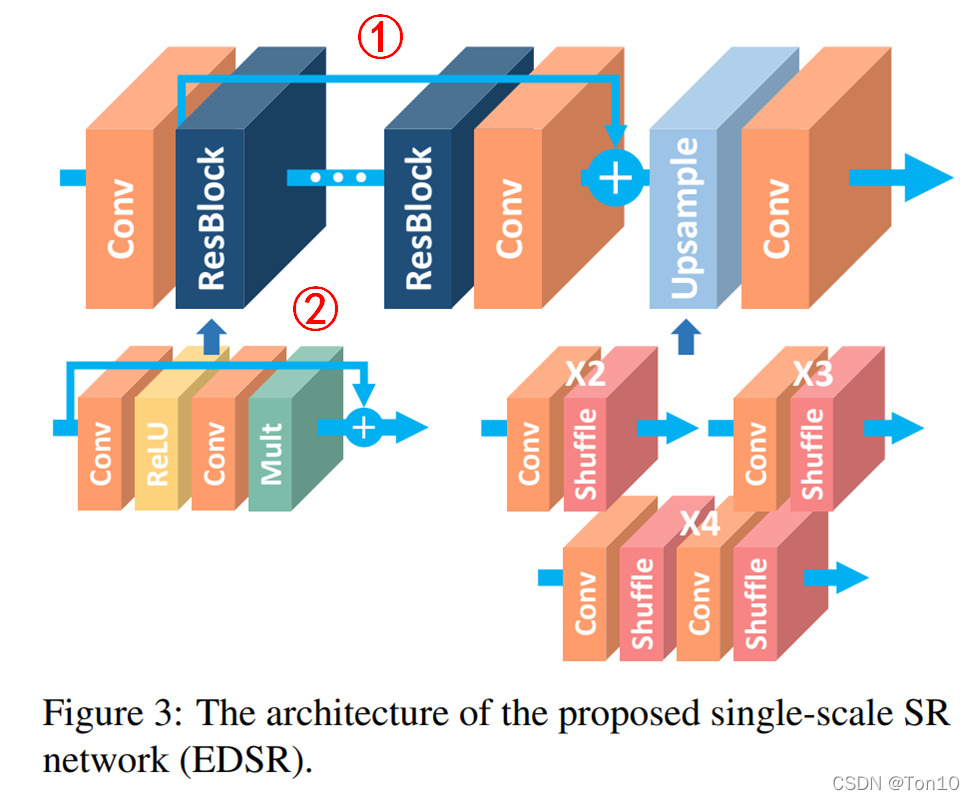 如上图所示就是EDSR的结构:最上面一排是网络结构,可以大致分为低层特征信息提取、高层特征信息提取、反卷积(上采样)层、重建层,基本和SRResNet、SRDenseNet是类似的。下面第二层分别表示残差块的构造以及反卷积层(分别是
如上图所示就是EDSR的结构:最上面一排是网络结构,可以大致分为低层特征信息提取、高层特征信息提取、反卷积(上采样)层、重建层,基本和SRResNet、SRDenseNet是类似的。下面第二层分别表示残差块的构造以及反卷积层(分别是
×
2
、
×
3
、
×
4
\times 2、\times 3、\times 4
×2、×3、×4)的构造。
Note:
- 连接①是将不同level的特征信息进行合并;连接②是ResNet块内部的残差连接。
- 在EDSR的baseline中,是没有residual scaling的,因为只是用到了64层feature map,相对通道数较低,几乎没有不稳定现象。但是在最后实验的EDSR中,作者是设置了residual scaling中的缩减系数为0.1,且 B = 32 , F = 256 B=32,F=256 B=32,F=256。
增加模型表现力最直接的方式就是增加模型的参数(复杂度),一般可以通过增加模型层数
B
B
B(即网络深度)以及滤波器个数
F
F
F(即网络宽度或者说通道数)。此外两者对于存储资源的消耗大约是
O
(
B
F
)
O(BF)
O(BF),增加的参数大约是
O
(
B
F
2
)
O(BF^2)
O(BF2),因此增加滤波器个数才能在有限存储空间下最大化参数个数。
在Inception-ResNet这篇文章以及本文中都指出,过大的滤波器个数(feature map个数,或者说通道数)会导致网络不稳定,最佳的解决办法不是降低学习率或者增加BN层,而是通过在残差块最后一层卷积后加上Residual scaling层: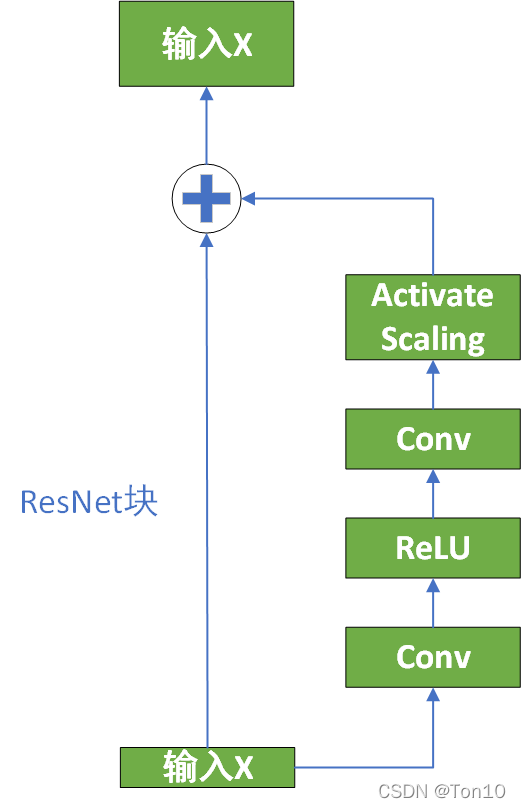
3.3 Multi-scale model
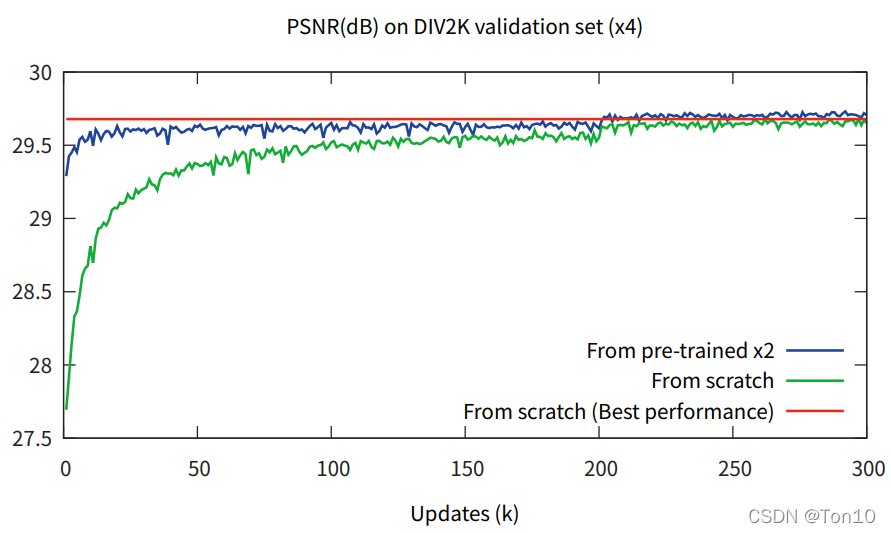
上图蓝色线表示的用训练好的up-scale-factor=2的EDSR网络作为
×
3
,
4
\times 3,4
×3,4训练时候的初始化参数,结果来看收敛速度以及表现力的提升都是有目共睹的,这一定程度上说明了不同缩放尺度之间是存在某种内在联系的。
因此作者设计了一种在单一网络中实现多尺度融合的SR网络——MDSR,其结构如下: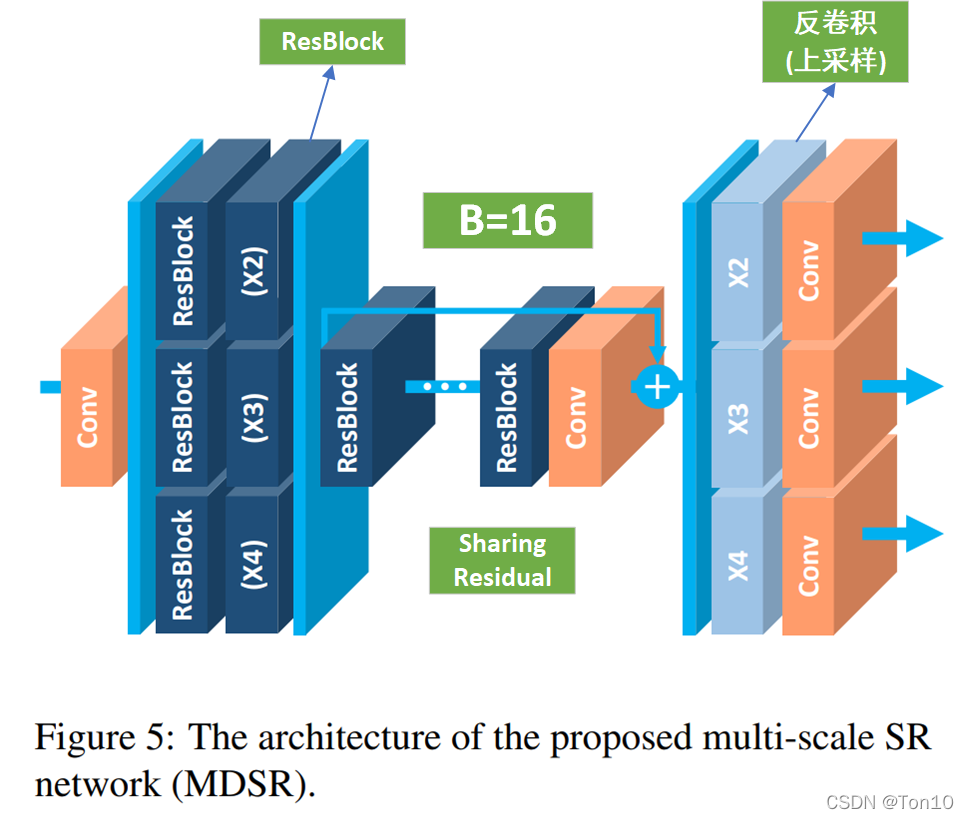
如上图所示是MDSR的网络结构,每个预处理模块由2个
5
×
5
5\times 5
5×5的卷积层组成,针对每一种up-scale-factor设置不同的残差快;中间是一个共享残差网络;尾巴处是针对不同缩放倍数设计的上采样网络:
Note:
- 总体来说,MDSR是基于EDSR的结构。
- 预处理阶段的残差块中的卷积采用较大的 5 × 5 5\times 5 5×5卷积核来增大初始阶段的感受野。
- 作者统计了一笔数据,训练3个单独的EDSR-baseline来实现不同放大倍数的SR需要消耗 1.5 M ∗ 3 = 4.5 M 1.5M*3=4.5M 1.5M∗3=4.5M的参数量;而训练一个MDSR的baseline需要 3.2 M 3.2M 3.2M的参数量,而MDSR在后续实验中表现也还不错,因此MDSR是一种资源消耗相对少且有一定表现力的SR网络。
下表是SRResNet、EDSR、MDSR资源占用统计: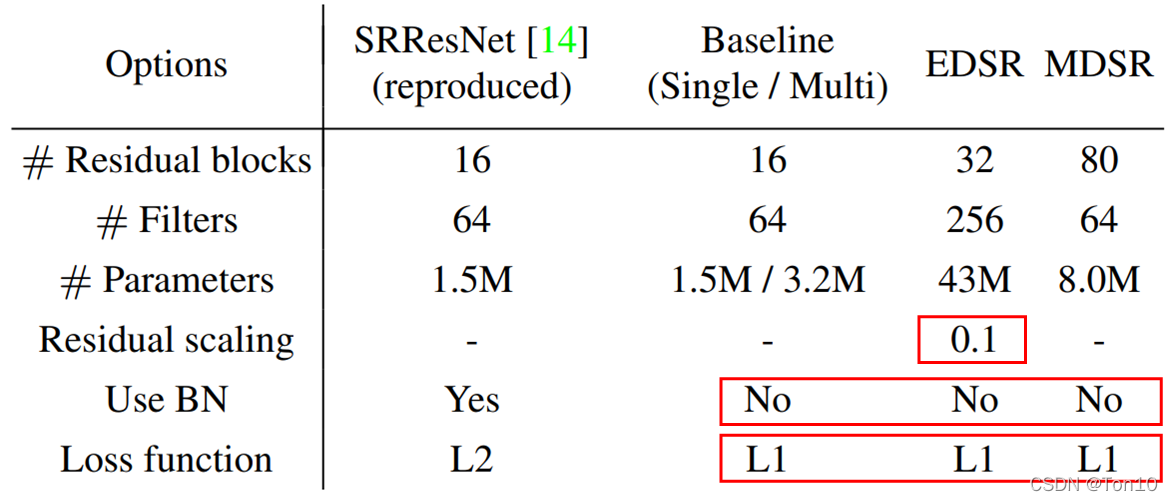
4 Experiments
4.1 Datasets
需要介绍一下新的数据集DIV2K,这是包含了2K高分辨率图像的数据集:训练集800张、验证集100张、测试集100张。
其余的标准benchmark:Set5、Set14、B100、Urban100。
4.2 Training Details
- 输入是数据集中的patch部分,RGB格式的 48 × 48 48\times 48 48×48大小。
- 通过水平翻转和90°旋转来做数据增强。
- Adam做优化。
- mini-batch=16。
- 学习率从 1 0 − 4 10^{-4} 10−4开始,每过 2 × 1 0 5 2\times 10^5 2×105个epoches,就减半一次。
- 对于EDSR中 × 3 、 4 \times 3、4 ×3、4的网络训练的初始化参数,是采用训练完毕的 × 2 \times 2 ×2EDSR网络的参数。而 × 2 \times 2 ×2的EDSR是从头开始训练的。
- EDSR和MDSR都采用 L 1 − L o s s L1-Loss L1−Loss,作者通过大量实验表明L1比L2有更好的收敛特性。
4.3 Geometric Self-ensemble
几何自集成的方法用于在测试的时候,将每一张输入图像经过8种不同(其中一种是原图)的变换方式进行转换:
I
n
,
i
L
R
=
T
i
(
I
n
L
R
)
I_{n,i}^{LR} = T_i(I_n^{LR})
In,iLR=Ti(InLR)然后将8个结果通过网络输出成
{
I
n
,
1
S
R
,
I
n
,
2
S
R
⋯
,
I
n
,
8
S
R
}
\{I^{SR}_{n,1},I^{SR}_{n,2}\cdots, I^{SR}_{n,8}\}
{In,1SR,In,2SR⋯,In,8SR},然后将每一个值经过转置处理:
I
~
n
,
i
S
R
=
T
i
−
1
(
I
n
,
i
S
R
)
,
\tilde{I}^{SR}_{n,i} = T_i^{-1}(I_{n,i}^{SR}),
I~n,iSR=Ti−1(In,iSR),最后在此基础上进行平均处理:
I
n
S
R
=
1
8
∑
i
=
1
8
I
~
n
,
i
S
R
.
I^{SR}_n = \frac{1}{8}\sum^8_{i=1}\tilde{I}^{SR}_{n,i}.
InSR=81i=1∑8I~n,iSR.最后拿着最终的结果去计算PSNR/SSIM,即图表中的EDSR+、MDSR+,从实验结果来看,self-ensemble确实可以提升表现力。
4.4 Evaluation on DIV2K Dataset
在DIV2K验证集(测试集不公开)中实验结果如下: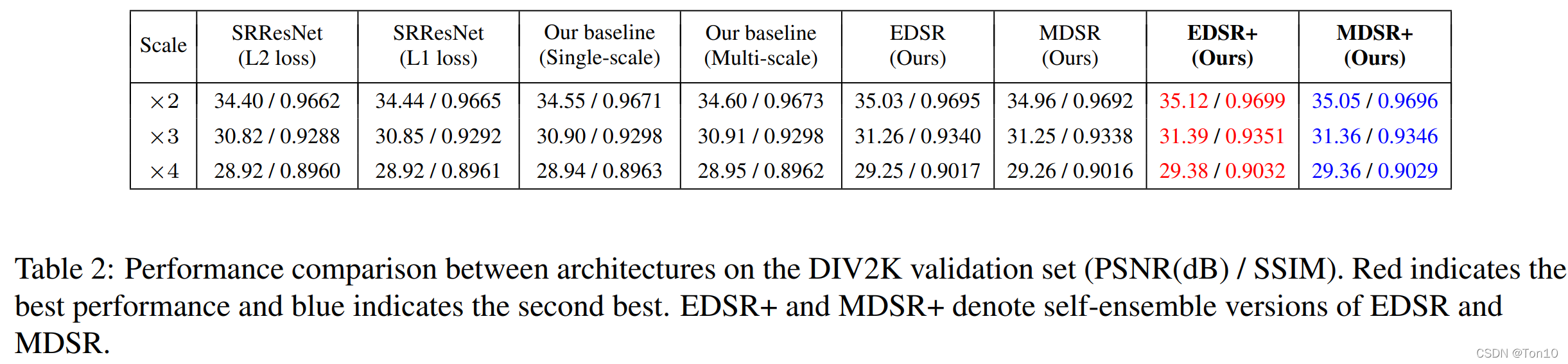
Note:
- 从结果来看,L1比L2-Loss更能对表现力进行提升。
- Geometric Self-ensemble确实可以提升表现力。
- EDSR在DIV2K上获取最佳的表现,其次MDSR也表现尚可。
4.5 Benchmark Results
作者对多种SR算法在Benchmark上的表现进行统计,结果如下: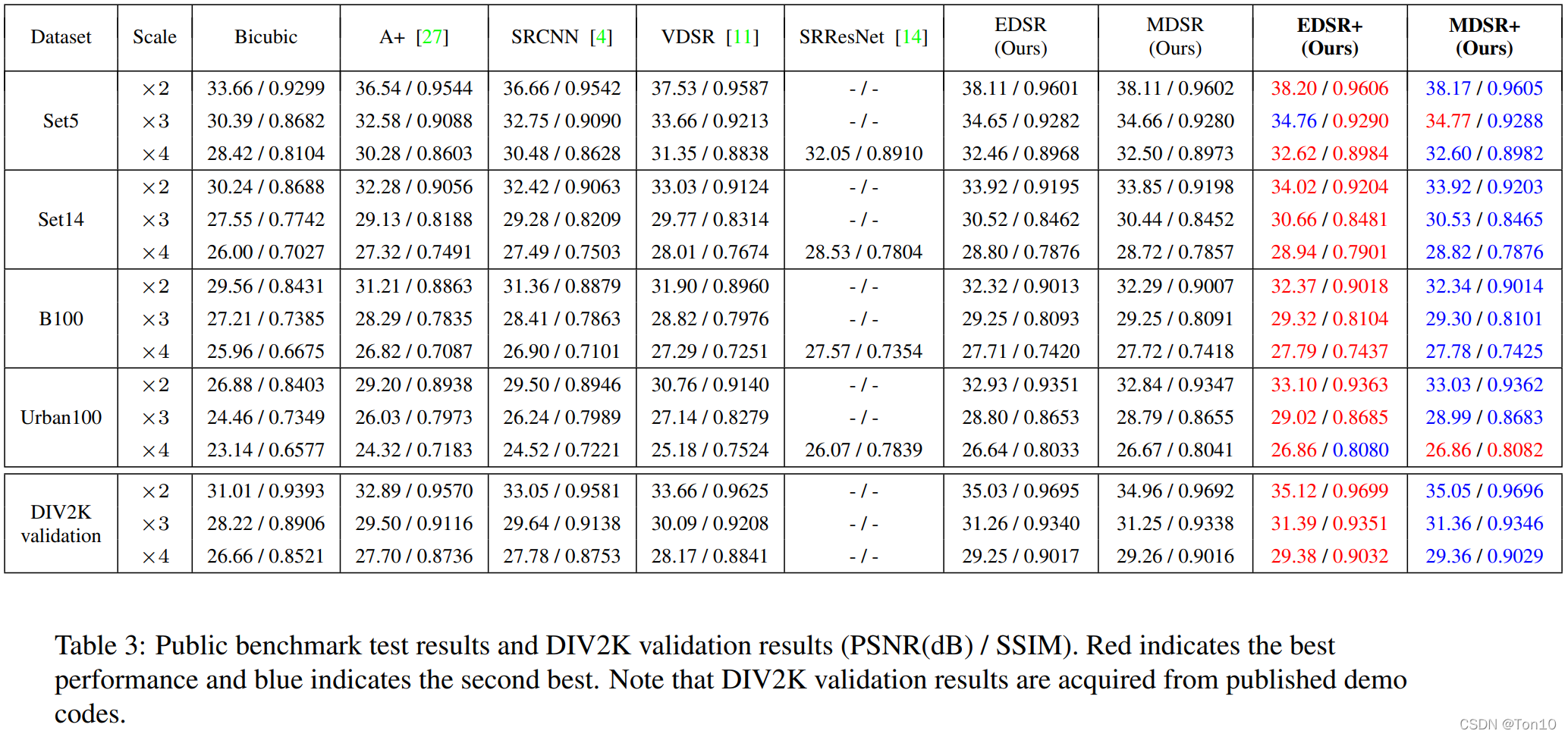
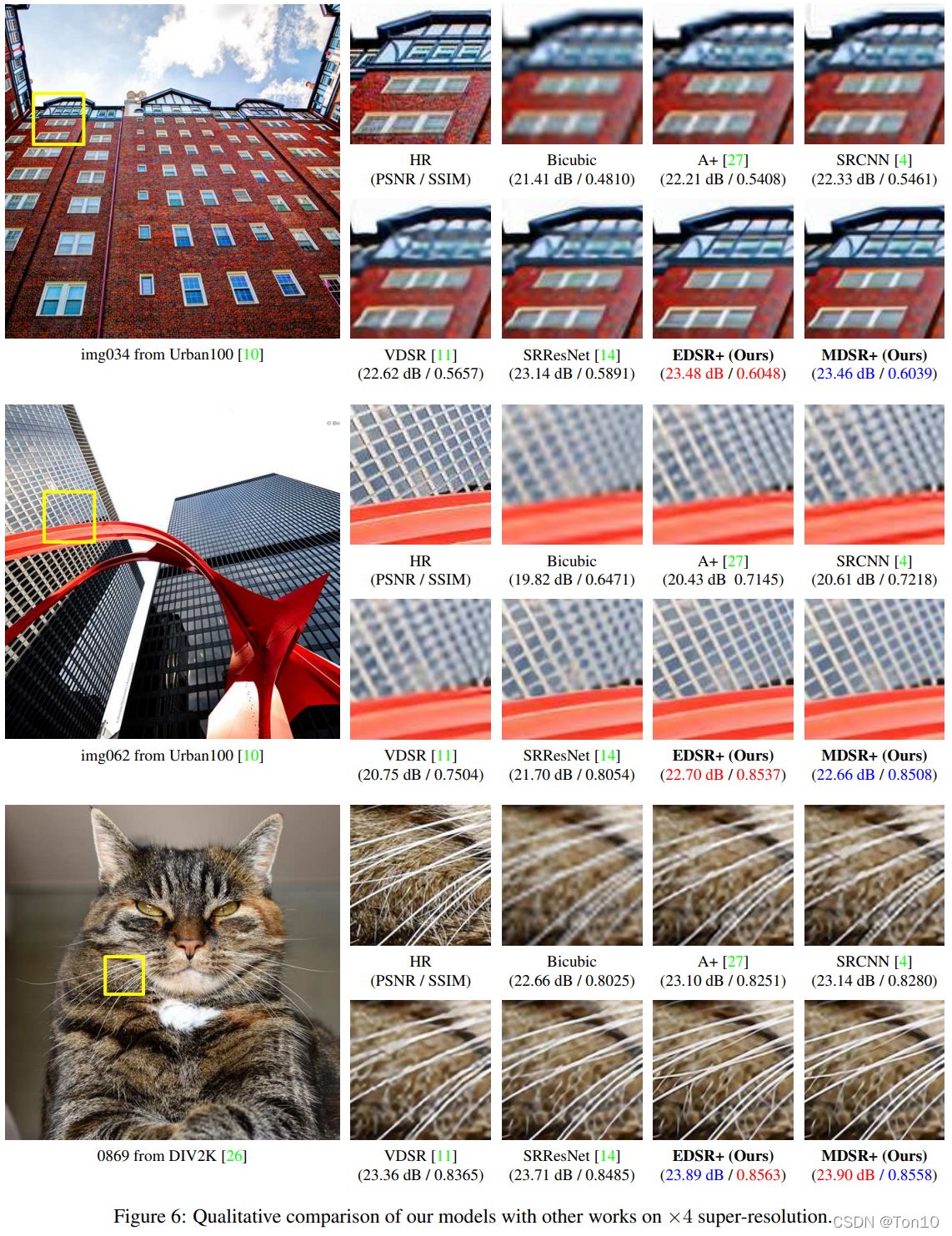
Note:
- 总体来看,EDSR和MDSR是包揽了最佳和次佳的表现结果。
- 从SRResNet和EDSR的对比来看,去除了BN层确实对表现力有提升效果。
5 NTIRE2017 SR Challenge
下面是EDSR和MDSR在NTIRE2017超分挑战赛上的表现,当时获取了第一和第二名的结果: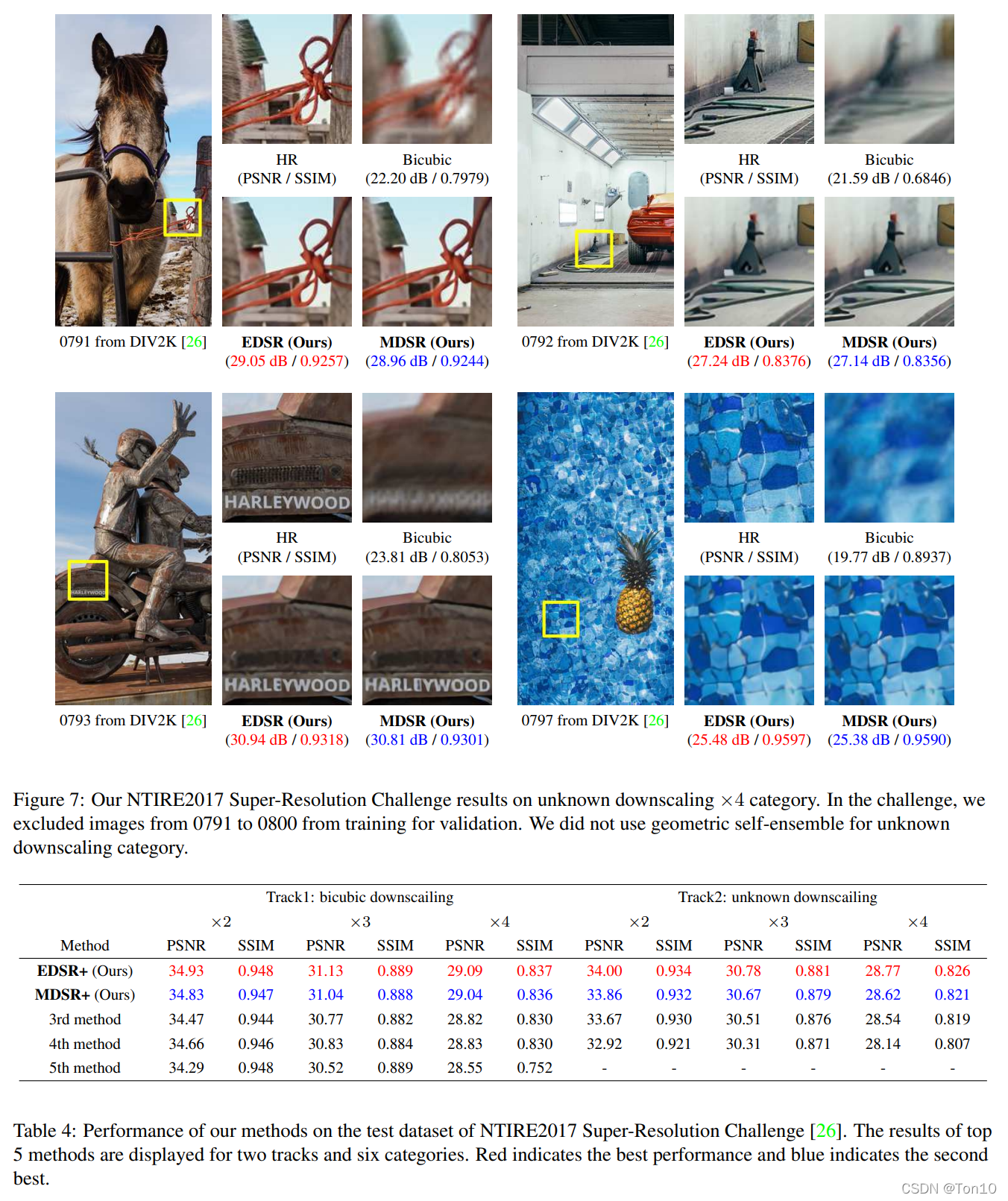
6 Conclusion
文章的贡献如下:
- 提出了一种增强型SRResNet的scale-specific网络——EDSR,它以残差块为基础,移除了不适合SR任务的BN块,从而减轻网络以及增强了网络的表现力,同时也使得BN空出来的部分可以插进更多的CNN来进一步提升网络的拟合能力。
- 为了减缓feature map过多(滤波器过多或者说通道数过大)带来训练不稳定的问题,作者借用Inception-ResNet那篇文章说的residual scaling技术加入到EDSR的残差块最后一层CNN后。
- 提出了一种在单一网络中实现多尺度融合的SR网络——MDSR,包括 × 2 、 3 、 4 \times 2、3、4 ×2、3、4。相比训练3个不同单一尺度的SR网络,MDSR可以节省更多的参数。
- 作者经过大量实验表明,L1-Loss比L2-Loss具有更好的收敛能力。
版权归原作者 Ton10 所有, 如有侵权,请联系我们删除。