
引言
人脸关键点检测即对人类面部若干个点位置进行检测,可以通过这些点的变化来实现许多功能,该技术可以应用到很多领域,例如捕捉人脸的关键点,然后驱动动画人物做相同的面部表情;识别人脸的面部表情,让机器能够察言观色等等。
如何检测人脸关键点
本文是实现15点的检测,至于N点的原理都是一样的,使用的算法模型是深度神经网络,使用CV也是可以的。
如何检测
这个问题抽象出来,就是一个使用神经网络来进行预测的功能,只不过输出是15个点的坐标,训练数据包含15个面部的特征点和面部的图像(大小为96x96),15个特征点分别是:left_eye_center, right_eye_center, left_eye_inner_corner, left_eye_outer_corner, right_eye_inner_corner, right_eye_outer_corner, left_eyebrow_inner_end, left_eyebrow_outer_end, right_eyebrow_inner_end, right_eyebrow_outer_end, nose_tip, mouth_left_corner, mouth_right_corner, mouth_center_top_lip, mouth_center_bottom_lip
因此神经网络需要学习一个从人脸图像到15个关键点坐标间的映射。
使用的网络结构
在本文中,我们使用深度神经网络来实现该功能,基本卷积块使用Google的Inception网络,也就是使用GoogLeNet网络,该结构的网络是基于卷积神经网络来改进的,是一个含有并行连接的网络。
众所周知,卷积有滤波、提取特征的作用,但到底采用多大的卷积来提取特征是最好的呢?这个问题没有确切的答案,那就集百家之长:使用多个形状不一的卷积来提取特征并进行拼接,从而学习到更为丰富的特征;特别是里面加上了1x1的卷积结构,能够实现跨通道的信息交互和整合(其本质就是在多个channel上的线性求和),同时能在feature map通道数上的降维(读者可以验证计算一下,能够极大减少卷积核的参数),也能够增加非线性映射次数使得网络能够更深。
下面是Inception块的示意图: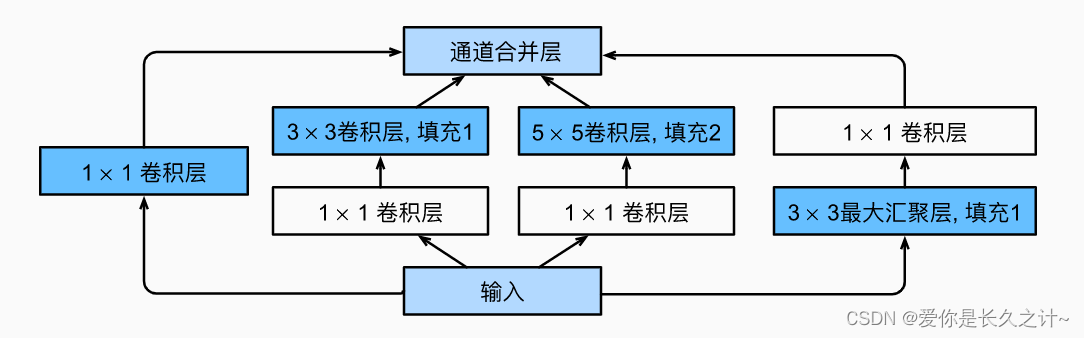
整个GoogLeNet的结构如下所示: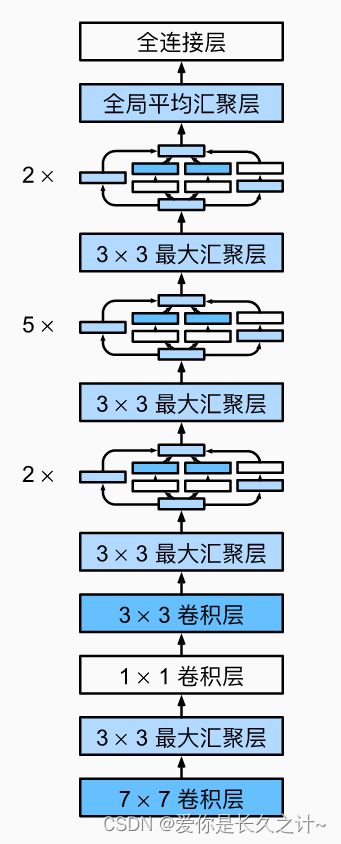
接下来是代码实现部分,后续作者会补充神经网络的相关原理知识,若对此感兴趣的读者也可继续关注支持~
代码实现
import torch as tc
from torch import nn
from torch.nn import functional as F
from torch.utils.data import DataLoader
from torch.utils.data import TensorDataset
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd
from sklearn.utils import shuffle
# 对图片像素的处理defproFunc1(data,testFlag:bool=False)->tuple:
data['Image']= data['Image'].apply(lambda im: np.fromstring(im, sep=' '))# 处理na
data = data.dropna()# 神经网络对数据范围较为敏感 /255 将所有像素都弄到[0,1]之间
X = np.vstack(data['Image'].values)/255
X = X.astype(np.float32)# 特别注意 这里要变成 n channle w h 要跟卷积第一层相匹配
X = X.reshape(-1,1,96,96)# 等会神经网络的输入层就是 96 96 黑白图片 通道只有一个# 只有训练集才有y 测试集返回一个None出去ifnot testFlag:
y = data[data.columns[:-1]].values
# 规范化
y =(y -48)/48
X, y = shuffle(X, y, random_state=42)
y = y.astype(np.float32)else:
y =Nonereturn X,y
# 工具类classUtilClass:def__init__(self,model,procFun,trainFile:str='data/training.csv',testFile:str='data/test.csv')->None:
self.trainFile = trainFile
self.testFile = testFile
self.trainData =None
self.testData =None
self.trainTarget =None
self.model = model
self.procFun = procFun
@staticmethoddefprocData(data, procFunc ,testFlag:bool=False)->tuple:return procFunc(data,testFlag)defloadResource(self):
rawTrain = pd.read_csv(self.trainFile)
rawTest = pd.read_csv(self.testFile)
self.trainData , self.trainTarget = self.procData(rawTrain,self.procFun)
self.testData , _ = self.procData(rawTest,self.procFun,testFlag=True)defgetTrain(self):return tc.from_numpy(self.trainData), tc.from_numpy(self.trainTarget)defgetTest(self):return tc.from_numpy(self.testData)@staticmethoddefplotData(img, keyPoints, axis):
axis.imshow(np.squeeze(img), cmap='gray')# 恢复到原始像素数据
keyPoints = keyPoints *48+48# 把keypoint弄到图上面
axis.scatter(keyPoints[0::2], keyPoints[1::2], marker='o', c='c', s=40)# 自定义的卷积神经网络classMyCNN(tc.nn.Module):def__init__(self,imgShape =(96,96,1),keyPoint:int=15):super(MyCNN, self).__init__()
self.conv1 = tc.nn.Conv2d(in_channels=1, out_channels =10, kernel_size=3)
self.pooling = tc.nn.MaxPool2d(kernel_size=2)
self.conv2 = tc.nn.Conv2d(10,5, kernel_size=3)# 这里的2420是通过下面的计算得出的 如果改变神经网络结构了 # 需要计算最后的Liner的in_feature数量 输出是固定的keyPoint*2
self.fc = tc.nn.Linear(2420, keyPoint*2)defforward(self, x):# print("start----------------------")
batch_size = x.size(0)# x = x.view((-1,1,96,96))# print('after view shape:',x.shape)
x = F.relu(self.pooling(self.conv1(x)))# print('conv1 size',x.shape)
x = F.relu(self.pooling(self.conv2(x)))# print('conv2 size',x.shape)# print('end--------------------------')# 改形状
x = x.view(batch_size,-1)# print(x.shape)
x = self.fc(x)# print(x.shape)return x
# GoogleNet基本的卷积块classMyInception(nn.Module):def__init__(self,in_channels, c1, c2, c3, c4,)->None:super().__init__()
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)defforward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))# 在通道维度上连结输出return tc.cat((p1, p2, p3, p4), dim=1)# GoogLeNet的设计 此处参数结果google大量实验得出
b1 = nn.Sequential(nn.Conv2d(1,64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64,64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64,192, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(MyInception(192,64,(96,128),(16,32),32),
MyInception(256,128,(128,192),(32,96),64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(MyInception(480,192,(96,208),(16,48),64),
MyInception(512,160,(112,224),(24,64),64),
MyInception(512,128,(128,256),(24,64),64),
MyInception(512,112,(144,288),(32,64),64),
MyInception(528,256,(160,320),(32,128),128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(MyInception(832,256,(160,320),(32,128),128),
MyInception(832,384,(192,384),(48,128),128),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
uClass = UtilClass(model=None,procFun=proFunc1)
uClass.loadResource()
xTrain ,yTrain = uClass.getTrain()
xTest = uClass.getTest()
dataset = TensorDataset(xTrain, yTrain)
trainLoader = DataLoader(dataset,64, shuffle=True, num_workers=4)# 训练net并进行测试 由于显示篇幅问题 只能打印出极为有限的若干测试图片效果deftestCode(net):
optimizer = tc.optim.Adam(params=net.parameters())
criterion = tc.nn.MSELoss()for epoch inrange(30):
trainLoss =0.0# 这里是用的是mini_batch 也就是说 每次只使用mini_batch个数据大小来计算# 总共有total个 因此总共训练 total/mini_batch 次# 由于不能每组数据只使用一次 所以在下面还要使用一个for循环来对整体训练多次for batchIndex, data inenumerate(trainLoader,0):
input_, y = data
yPred = net(input_)
loss = criterion(yPred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
trainLoss += loss.item()# 只在每5个epoch的最后一轮打印信息if batchIndex %30==29andnot epoch %5:print("[{},{}] loss:{}".format(epoch +1, batchIndex +1, trainLoss /300))
trainLoss =0.0# 测试print("-----------test begin-------------")# print(xTest.shape)
yPost = net(xTest)# print(yPost.shape)import matplotlib.pyplot as plt
%matplotlib inline
fig = plt.figure(figsize=(20,20))
fig.subplots_adjust(left=0, right=1, bottom=0, top=1, hspace=0.05, wspace=0.05)for i inrange(9,18):
ax = fig.add_subplot(3,3, i -9+1, xticks=[], yticks=[])
uClass.plotData(xTest[i], y[i], ax)print("-----------test end-------------")if __name__ =="__main__":# 训练MyCNN网络 并可视化在9个测试数据的效果图
myNet = MyCNN()
testCode(myNet)
inception = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024,30))
testCode(inception)
本文使用的数据可在此找到两个data文件,本文有你帮助的话,就给个点赞关注支持一下吧!
版权归原作者 爱你是长久之计~ 所有, 如有侵权,请联系我们删除。