
1、基本概念及逻辑关系
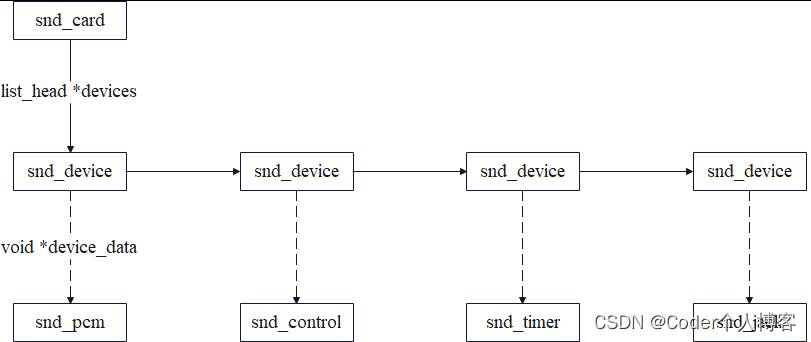
如上图,通过上一节声卡的学习我们已经知道PCM是声卡的一个子设备,或者表示一个PCM实例。
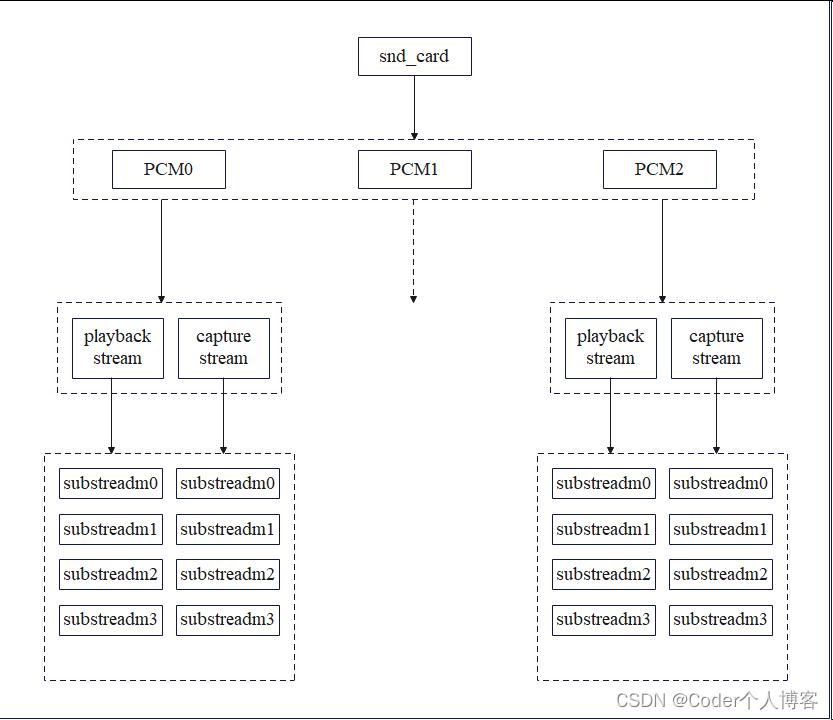
每个声卡最多可以包含4个pcm的实例,每个pcm实例对应一个pcm设备文件。pcm实例数量的这种限制源于linux设备号所占用的位大小,如果以后使用64位的设备号,我们将可以创建更多的pcm实例。不过大多数情况下,在嵌入式设备中,一个pcm实例已经足够了。
一个pcm实例由一个playback stream和一个capture stream组成,这两个stream又分别有一个或多个substreams组成。可以用如下图来表示他们直接的逻辑关系:
当一个子流已经存在,并且已经被打开,当再次被打开的时候,会被阻塞。
在实际的应用中,通常不会如上图这么复杂,大多数情况下是一个声卡有一个PCM实例,PCM下面有一个playback和capture,而playback和capture各自有一个substream。
PCM层有几个很重要的结构体,我们通过如下的UML图来梳理他们直接的关系。

图片地址:http://hi.csdn.net/attachment/201104/2/0_1301728746sAUd.gif
1、**snd_pcm:**挂在snd_card下面的一个snd_device。
2、**snd_pcm中的字段:streams[2]**:该数组中的两个元素指向两个snd_pcm_str结构,分别代表playback stream和capture stream。
3、**snd_pcm_str中的substream字段**:指向snd_pcm_substream结构。
4、**snd_pcm_substream**是pcm中间层的核心,绝大部分任务都是在substream中处理,尤其是他的ops(snd_pcm_ops)字段,许多user空间的应用程序通过alsa-lib对驱动程序的请求都是由该结构中的函数处理。它的runtime字段则指向snd_pcm_runtime结构,snd_pcm_runtime记录这substream的一些重要的软件和硬件运行环境和参数。
2、PCM创建流程
PCM的整个创建流程请参考如下时序图进行理解:

alsa-driver的中间层已经提供新建PCM的API:
2.1、创建PCM实例
int snd_pcm_new(struct snd_card *card, const char *id, int device,
int playback_count, int capture_count, struct snd_pcm **rpcm)
**card:**表示所属的声卡。
** ID:**PCM实例的ID(名字)。
**device:**表示目前创建的是该声卡下的第几个PCM,第一个PCM设备从0开始计数。
**playback_count:**表示该PCM播放流中将会有几个substream。
**capture_count** :表示该PCM录音流中将会有几个substream。
** rpcm:**返回的PCM实例。
该函数的主要作用是创建PCM逻辑设备,创建回放子流和录制子流实例,并初始化回放子流和录制子流的PCM操作函数(数据搬运时,需要调用这些函数来驱动 codec、codec_dai、cpu_dai、dma 设备工作)。
2.2、设置PCM设备的操作函数
void snd_pcm_set_ops(struct snd_pcm *pcm, int direction,
const struct snd_pcm_ops *ops)
**pcm:**上述**snd_pcm_new** 创建的PCM实例。
**direction:**是指SNDRV_PCM_STREAM_PLAYBACK或SNDRV_PCM_STREAM_CAPTURE,即设置为播放或者录音功能。
** snd_pcm_ops:**结构中的函数通常就是我们驱动要实现的函数。
2.3、定义PCM的操作函数
以AC97驱动(linux/sound/arm/pxa2xx-ac97.c)为例,在驱动中对于PCM进行了如下设置:
static const struct snd_pcm_ops pxa2xx_ac97_pcm_ops = {
.open = pxa2xx_ac97_pcm_open,
.close = pxa2xx_ac97_pcm_close,
.hw_params = pxa2xx_pcm_hw_params,
.prepare = pxa2xx_ac97_pcm_prepare,
.trigger = pxa2xx_pcm_trigger,
.pointer = pxa2xx_pcm_pointer,
};
snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_PLAYBACK, &pxa2xx_ac97_pcm_ops);
snd_pcm_set_ops(pcm, SNDRV_PCM_STREAM_CAPTURE, &pxa2xx_ac97_pcm_ops);
2.4、定义硬件参数
static const struct snd_pcm_hardware pxa2xx_pcm_hardware = {
.info = SNDRV_PCM_INFO_MMAP |
SNDRV_PCM_INFO_MMAP_VALID |
SNDRV_PCM_INFO_INTERLEAVED |
SNDRV_PCM_INFO_PAUSE |
SNDRV_PCM_INFO_RESUME,
.formats = SNDRV_PCM_FMTBIT_S16_LE |
SNDRV_PCM_FMTBIT_S24_LE |
SNDRV_PCM_FMTBIT_S32_LE,
.period_bytes_min = 32,
.period_bytes_max = 8192 - 32,
.periods_min = 1,
.periods_max = 256,
.buffer_bytes_max = 128 * 1024,
.fifo_size = 32,
};
int pxa2xx_pcm_open(struct snd_pcm_substream *substream)
{
struct snd_soc_pcm_runtime *rtd = substream->private_data;
struct snd_pcm_runtime *runtime = substream->runtime;
struct snd_dmaengine_dai_dma_data *dma_params;
int ret;
runtime->hw = pxa2xx_pcm_hardware;
dma_params = snd_soc_dai_get_dma_data(asoc_rtd_to_cpu(rtd, 0), substream);
if (!dma_params)
return 0;
/*
* For mysterious reasons (and despite what the manual says)
* playback samples are lost if the DMA count is not a multiple
* of the DMA burst size. Let's add a rule to enforce that.
*/
ret = snd_pcm_hw_constraint_step(runtime, 0,
SNDRV_PCM_HW_PARAM_PERIOD_BYTES, 32);
if (ret)
return ret;
ret = snd_pcm_hw_constraint_step(runtime, 0,
SNDRV_PCM_HW_PARAM_BUFFER_BYTES, 32);
if (ret)
return ret;
ret = snd_pcm_hw_constraint_integer(runtime,
SNDRV_PCM_HW_PARAM_PERIODS);
if (ret < 0)
return ret;
return snd_dmaengine_pcm_open(
substream, dma_request_slave_channel(asoc_rtd_to_cpu(rtd, 0)->dev,
dma_params->chan_name));
}
3、PCM相关源码分析
3.1、snd_pcm_new
/**
* snd_pcm_new - create a new PCM instance
* @card: the card instance
* @id: the id string
* @device: the device index (zero based)
* @playback_count: the number of substreams for playback
* @capture_count: the number of substreams for capture
* @rpcm: the pointer to store the new pcm instance
*
* Creates a new PCM instance.
*
* The pcm operators have to be set afterwards to the new instance
* via snd_pcm_set_ops().
*
* Return: Zero if successful, or a negative error code on failure.
*/
int snd_pcm_new(struct snd_card *card, const char *id, int device,
int playback_count, int capture_count, struct snd_pcm **rpcm)
{
/* 直接调用函数_snd_pcm_new,参数internal传入false */
return _snd_pcm_new(card, id, device, playback_count, capture_count,
false, rpcm);
}
static int _snd_pcm_new(struct snd_card *card, const char *id, int device,
int playback_count, int capture_count, bool internal,
struct snd_pcm **rpcm)
{
struct snd_pcm *pcm;
int err;
/* 1. 逻辑设备的操作函数结构体, 主要用于注册子设备 */
static const struct snd_device_ops ops = {
.dev_free = snd_pcm_dev_free,
.dev_register = snd_pcm_dev_register,
.dev_disconnect = snd_pcm_dev_disconnect,
};
static const struct snd_device_ops internal_ops = {
.dev_free = snd_pcm_dev_free,
};
if (snd_BUG_ON(!card))
return -ENXIO;
if (rpcm)
*rpcm = NULL;
/* 2. 为snd_pcm结构体分配空间,根据传入参数赋值 */
pcm = kzalloc(sizeof(*pcm), GFP_KERNEL);
if (!pcm)
return -ENOMEM;
pcm->card = card;
pcm->device = device;
pcm->internal = internal;
mutex_init(&pcm->open_mutex);
init_waitqueue_head(&pcm->open_wait);
INIT_LIST_HEAD(&pcm->list);
if (id)
strscpy(pcm->id, id, sizeof(pcm->id));
/* 3. 根据传入的playback和capture的个数创建PCM流 snd_pcm_str */
err = snd_pcm_new_stream(pcm, SNDRV_PCM_STREAM_PLAYBACK,
playback_count);
if (err < 0)
goto free_pcm;
err = snd_pcm_new_stream(pcm, SNDRV_PCM_STREAM_CAPTURE, capture_count);
if (err < 0)
goto free_pcm;
/* 4. 创建一个PCM逻辑设备,创建逻辑设备,并添加到逻辑设备链表 */
err = snd_device_new(card, SNDRV_DEV_PCM, pcm,
internal ? &internal_ops : &ops);
if (err < 0)
goto free_pcm;
if (rpcm)
*rpcm = pcm;
return 0;
free_pcm:
snd_pcm_free(pcm);
return err;
}
3.2、snd_pcm
struct snd_pcm {
struct snd_card *card;
struct list_head list;
int device; /* device number */
unsigned int info_flags;
unsigned short dev_class;
unsigned short dev_subclass;
char id[64];
char name[80];
struct snd_pcm_str streams[2];
struct mutex open_mutex;
wait_queue_head_t open_wait;
void *private_data;
void (*private_free) (struct snd_pcm *pcm);
bool internal; /* pcm is for internal use only */
bool nonatomic; /* whole PCM operations are in non-atomic context */
bool no_device_suspend; /* don't invoke device PM suspend */
#if IS_ENABLED(CONFIG_SND_PCM_OSS)
struct snd_pcm_oss oss;
#endif
};
这里重要的变量有两个streams与private_data。streams有两个,是因为一个指向播放设备,一个指向录音设备。private_data在很多结构里都可以看到,和面象对象里的继承有点类似,如果将snd_pcm理解为基类的话,private_data指向的就是它的继承类,也就是真正的实现者。
list,在pcm.c中有一个全局变量snd_pcm_devices,将所有的snd_pcm对象链接起来,目的是外部提供一些可供枚举所有设备的接口,看起来并不怎么被用到。
另外还有info_flags、dev_class等变量看起来是为一些特殊设备预留的,对待一些特殊操作。
struct snd_pcm_str {
int stream; /* stream (direction) */
struct snd_pcm *pcm;
/* -- substreams -- */
unsigned int substream_count;
unsigned int substream_opened;
struct snd_pcm_substream *substream;
#if IS_ENABLED(CONFIG_SND_PCM_OSS)
/* -- OSS things -- */
struct snd_pcm_oss_stream oss;
#endif
#ifdef CONFIG_SND_VERBOSE_PROCFS
struct snd_info_entry *proc_root;
#ifdef CONFIG_SND_PCM_XRUN_DEBUG
unsigned int xrun_debug; /* 0 = disabled, 1 = verbose, 2 = stacktrace */
#endif
#endif
struct snd_kcontrol *chmap_kctl; /* channel-mapping controls */
struct device dev;
};
snd_pcm_str的主要作用是指向snd_pcm_substream,而snd_pcm_substream可以有多个,这也是snd_pcm_str存在的原因,否则snd_pcm直接指向snd_pcm_substream就可以了。
这里的dev是将pcm加入到文件系统时要用到。包含的信息,在下面介绍的snd_pcm_new_stream中会看到。
3.3、snd_pcm_new_stream
/**
* snd_pcm_new_stream - create a new PCM stream
* @pcm: the pcm instance
* @stream: the stream direction, SNDRV_PCM_STREAM_XXX
* @substream_count: the number of substreams
*
* Creates a new stream for the pcm.
* The corresponding stream on the pcm must have been empty before
* calling this, i.e. zero must be given to the argument of
* snd_pcm_new().
*
* Return: Zero if successful, or a negative error code on failure.
*/
int snd_pcm_new_stream(struct snd_pcm *pcm, int stream, int substream_count)
{
int idx, err;
/* 3.1 根据传入的参数,为PCM流(snd_pcm_str)赋值:方向,所属的PCM,PCM子流的个数 */
struct snd_pcm_str *pstr = &pcm->streams[stream];
struct snd_pcm_substream *substream, *prev;
#if IS_ENABLED(CONFIG_SND_PCM_OSS)
mutex_init(&pstr->oss.setup_mutex);
#endif
pstr->stream = stream;
pstr->pcm = pcm;
pstr->substream_count = substream_count;
if (!substream_count)
return 0;
snd_device_initialize(&pstr->dev, pcm->card);
pstr->dev.groups = pcm_dev_attr_groups;
pstr->dev.type = &pcm_dev_type;
dev_set_name(&pstr->dev, "pcmC%iD%i%c", pcm->card->number, pcm->device,
stream == SNDRV_PCM_STREAM_PLAYBACK ? 'p' : 'c');
/* proc */
if (!pcm->internal) {
err = snd_pcm_stream_proc_init(pstr);
if (err < 0) {
pcm_err(pcm, "Error in snd_pcm_stream_proc_init\n");
return err;
}
}
prev = NULL;
for (idx = 0, prev = NULL; idx < substream_count; idx++) {
/* 为子流分配空间,赋值(pcm,pcm流,ID, 方向.....) */
substream = kzalloc(sizeof(*substream), GFP_KERNEL);
if (!substream)
return -ENOMEM;
substream->pcm = pcm;
substream->pstr = pstr;
substream->number = idx;
substream->stream = stream;
sprintf(substream->name, "subdevice #%i", idx);
substream->buffer_bytes_max = UINT_MAX;
/* 添加子流到子流的链表 */
if (prev == NULL) /* 第一个子流 */
pstr->substream = substream;
else
prev->next = substream; /* 非第一个子流,添加到前一个子流后部 */
/* proc */
if (!pcm->internal) {
err = snd_pcm_substream_proc_init(substream);
if (err < 0) {
pcm_err(pcm,
"Error in snd_pcm_stream_proc_init\n");
if (prev == NULL)
pstr->substream = NULL;
else
prev->next = NULL;
kfree(substream);
return err;
}
}
/* 结构体初始化 */
substream->group = &substream->self_group;
snd_pcm_group_init(&substream->self_group);
list_add_tail(&substream->link_list, &substream->self_group.substreams);
atomic_set(&substream->mmap_count, 0);
prev = substream;
}
return 0;
}
函数参数中的int stream,是一个枚举类型:
enum {
SNDRV_PCM_STREAM_PLAYBACK = 0,
SNDRV_PCM_STREAM_CAPTURE,
SNDRV_PCM_STREAM_LAST = SNDRV_PCM_STREAM_CAPTURE,
};
从snd_device_initialize(&pstr->dev, pcm->card); 开始。dev最终会被传入device_add函数中,用来构建文件系统。
void snd_device_initialize(struct device *dev, struct snd_card *card)
{
device_initialize(dev);
if (card)
dev->parent = &card->card_dev;
dev->class = sound_class;
dev->release = default_release;
}
这段函数中可以看到dev->class被设置成sound_class,这个是我们之前提到的文件放到snd目录的原因。
3.4、snd_pcm_substream
struct snd_pcm_substream {
struct snd_pcm *pcm;
struct snd_pcm_str *pstr;
void *private_data; /* copied from pcm->private_data */
int number;
char name[32]; /* substream name */
int stream; /* stream (direction) */
struct pm_qos_request latency_pm_qos_req; /* pm_qos request */
size_t buffer_bytes_max; /* limit ring buffer size */
struct snd_dma_buffer dma_buffer;
size_t dma_max;
/* -- hardware operations -- */
const struct snd_pcm_ops *ops;
/* -- runtime information -- */
struct snd_pcm_runtime *runtime;
/* -- timer section -- */
struct snd_timer *timer; /* timer */
unsigned timer_running: 1; /* time is running */
long wait_time; /* time in ms for R/W to wait for avail */
/* -- next substream -- */
struct snd_pcm_substream *next;
/* -- linked substreams -- */
struct list_head link_list; /* linked list member */
struct snd_pcm_group self_group; /* fake group for non linked substream (with substream lock inside) */
struct snd_pcm_group *group; /* pointer to current group */
/* -- assigned files -- */
int ref_count;
atomic_t mmap_count;
unsigned int f_flags;
void (*pcm_release)(struct snd_pcm_substream *);
struct pid *pid;
#if IS_ENABLED(CONFIG_SND_PCM_OSS)
/* -- OSS things -- */
struct snd_pcm_oss_substream oss;
#endif
#ifdef CONFIG_SND_VERBOSE_PROCFS
struct snd_info_entry *proc_root;
#endif /* CONFIG_SND_VERBOSE_PROCFS */
/* misc flags */
unsigned int hw_opened: 1;
unsigned int managed_buffer_alloc:1;
};
snd_pcm_substream的内容有些多,此处只需要重要的进行介绍。
**private_data:**从snd_pcm中的private_data拷贝过来的,指向实现者的结构。
** const struct snd_pcm_ops *ops:**这部分是框架的内容,具体的操作需要实现者的参与,留给实现者的函数指针集。这个和文件操作的设计策略是一致的。
**struct snd_pcm_runtime *runtime:**读写数据的时候由它来控制。到分析读写代码的时候,会重点关注它。
** struct snd_pcm_substream *next:将多个snd_pcm_substream对象链接起来,它就是snd_pcm_str**指向的链接。
** group:**在用户空间可以通过SNDRV_PCM_IOCTL_LINK将多个substream链接起来。然后就可以对这些对象进行统一的操作。我没遇到过具体的应用场景。
3.5、snd_pcm_set_ops
/**
* snd_pcm_set_ops - set the PCM operators
* @pcm: the pcm instance
* @direction: stream direction, SNDRV_PCM_STREAM_XXX
* @ops: the operator table
*
* Sets the given PCM operators to the pcm instance.
*/
void snd_pcm_set_ops(struct snd_pcm *pcm, int direction,
const struct snd_pcm_ops *ops)
{
struct snd_pcm_str *stream = &pcm->streams[direction];
struct snd_pcm_substream *substream;
for (substream = stream->substream; substream != NULL; substream = substream->next)
substream->ops = ops;
}
EXPORT_SYMBOL(snd_pcm_set_ops);
此函数是提供给调用侧使用的。设置的内容可以参考pcm文件结构简图。
3.6、snd_pcm_dev_register
在继续分析snd_pcm_dev_register函数之前需要先介绍一个结构体。struct snd_minor。
struct snd_minor {
int type; /* SNDRV_DEVICE_TYPE_XXX */
int card; /* card number */
int device; /* device number */
const struct file_operations *f_ops; /* file operations */
void *private_data; /* private data for f_ops->open */
struct device *dev; /* device for sysfs */
struct snd_card *card_ptr; /* assigned card instance */
};
**type: **设备类型,比如是pcm, control, timer等设备。
** card_number: **所属的card。
** device:** 当前设备类型下的设备编号。
** f_ops: **具体设备的文件操作集合。
** private_data: **open函数的私有数据。
** card_ptr: **所属的card。
此结构体是用来保存当前设备的上下文信息,该card下所有逻辑设备都存在此结构。
static int snd_pcm_dev_register(struct snd_device *device)
{
/* 1、添加pcm结构体到全局链表snd_pcm_devices */
int cidx, err;
struct snd_pcm_substream *substream;
struct snd_pcm *pcm;
if (snd_BUG_ON(!device || !device->device_data))
return -ENXIO;
/* snd_devcie保存的是snd_pcm对象 */
pcm = device->device_data;
mutex_lock(®ister_mutex);
/* snd_pcm对象将被保存到全局变量snd_pcm_devices中,用于枚举设备等操作 */
err = snd_pcm_add(pcm);
if (err)
goto unlock;
for (cidx = 0; cidx < 2; cidx++) {
/* 2、确定PCM设备节点名字 */
int devtype = -1;
if (pcm->streams[cidx].substream == NULL)
continue;
switch (cidx) {
case SNDRV_PCM_STREAM_PLAYBACK:
devtype = SNDRV_DEVICE_TYPE_PCM_PLAYBACK;
break;
case SNDRV_PCM_STREAM_CAPTURE:
devtype = SNDRV_DEVICE_TYPE_PCM_CAPTURE;
break;
}
/* register pcm */
/* 将设备添加到文件系统,将snd_pcm_f_ops传入,将被设置给snd_minor对象 */
err = snd_register_device(devtype, pcm->card, pcm->device,
&snd_pcm_f_ops[cidx], pcm,
&pcm->streams[cidx].dev);
if (err < 0) {
list_del_init(&pcm->list);
goto unlock;
}
for (substream = pcm->streams[cidx].substream; substream; substream = substream->next)
/* 设定CONFIG_SND_PCM_TIMER宏的时候,会去设置substream的时间 */
snd_pcm_timer_init(substream);
}
pcm_call_notify(pcm, n_register);
unlock:
mutex_unlock(®ister_mutex);
return err;
}
/**
* snd_register_device - Register the ALSA device file for the card
* @type: the device type, SNDRV_DEVICE_TYPE_XXX
* @card: the card instance
* @dev: the device index
* @f_ops: the file operations
* @private_data: user pointer for f_ops->open()
* @device: the device to register
*
* Registers an ALSA device file for the given card.
* The operators have to be set in reg parameter.
*
* Return: Zero if successful, or a negative error code on failure.
*/
int snd_register_device(int type, struct snd_card *card, int dev,
const struct file_operations *f_ops,
void *private_data, struct device *device)
{
int minor;
int err = 0;
struct snd_minor *preg;
if (snd_BUG_ON(!device))
return -EINVAL;
preg = kmalloc(sizeof *preg, GFP_KERNEL);
if (preg == NULL)
return -ENOMEM;
/* 创建一个snd_minor,并添加到全局结构体 snd_minors */
preg->type = type;
preg->card = card ? card->number : -1;
preg->device = dev;
preg->f_ops = f_ops;
preg->private_data = private_data;
preg->card_ptr = card;
mutex_lock(&sound_mutex);
/* 4、注册一个设备节点 */
minor = snd_find_free_minor(type, card, dev);
if (minor < 0) {
err = minor;
goto error;
}
preg->dev = device;
device->devt = MKDEV(major, minor);
err = device_add(device);
if (err < 0)
goto error;
snd_minors[minor] = preg;
error:
mutex_unlock(&sound_mutex);
if (err < 0)
kfree(preg);
return err;
}
当声卡被注册时,会注册所有的逻辑设备。主要的工作是创建PCM设备节点
具体的流程:
1、添加pcm结构体到全局链表snd_pcm_devices。
2、确定PCM设备节点名字。
3、创建一个snd_minor,并添加到全局结构体 snd_minors。
4、注册一个设备节点
可以看到添加到文件系统的是播放设备和录音设备,根据snd_pcm_str指向的内容来设定的。代码中看到snd_pcm也被定义为SNDRV_DEV_PCM设备,但是文件系统中并不会保存这个类型的设备。
snd_pcm_timer_init是在CONFIG_SND_PCM_TIMER宏被定义的时候,会起作用。
通过下图可以帮助你更好的理解各结构直接的乱讲关系。

本文转载自: https://blog.csdn.net/code_lyb/article/details/126144107
版权归原作者 Coder个人博客 所有, 如有侵权,请联系我们删除。
版权归原作者 Coder个人博客 所有, 如有侵权,请联系我们删除。