
CycleGAN代码
参考代码
**
参考代码链接
:**https://github.com/Lornatang/CycleGAN-PyTorch
**
数据集百度云
:**https://pan.baidu.com/s/1UryUwsCoyqG_xhH7VJXdLw?pwd=hqkb
CycleGAN原理
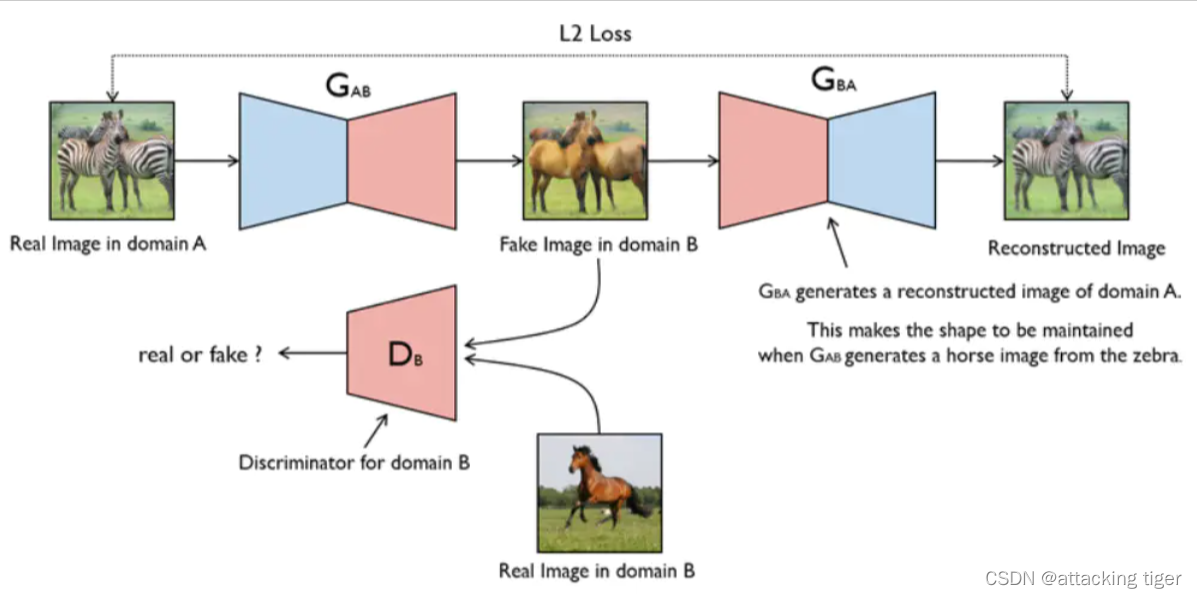
cycleGAN是一种由Generative Adversarial Networks发展而来的一种无监督机器学习,是在pix2pix的基础上发展起来的,主要应用于非配对图片的图像生成和转换,可以实现风格的转换,比如把照片转换为油画风格,或者把照片的橘子转换为苹果、马与斑马之间的转换等。因为不需要成对的数据集就能够转换,所以在数据准备上会简单很多,十分具有应用前景。
CycleGAN本质上是两个镜像对称的GAN,构成了一个环形网络。两个GAN共享两个生成器,并各自带一个判别器,即共有两个判别器和两个生成器。一个单向GAN两个loss,两个即共四个loss。
代码介绍
models
主要就是设置一个初始化参数的函数,在开始训练时调用。
构建了生成器和判别器网络。
生成器中的残差块除了减弱梯度消失外,还可以理解为这是一种自适应深度,也就是网络可以自己调节层数的深浅,至少可以退化为输入,不会变得更糟糕。可以使网络变得更深,更加的平滑,使深度神经网络的训练成为了可能。
import torch.nn as nn
import torch.nn.functional as F
import torch
## 定义参数初始化函数defweights_init_normal(m):
classname = m.__class__.__name__ ## m作为一个形参,原则上可以传递很多的内容, 为了实现多实参传递,每一个moudle要给出自己的name. 所以这句话就是返回m的名字. if classname.find("Conv")!=-1:## find():实现查找classname中是否含有Conv字符,没有返回-1;有返回0.
torch.nn.init.normal_(m.weight.data,0.0,0.02)## m.weight.data表示需要初始化的权重。nn.init.normal_():表示随机初始化采用正态分布,均值为0,标准差为0.02.ifhasattr(m,"bias")and m.bias isnotNone:## hasattr():用于判断m是否包含对应的属性bias, 以及bias属性是否不为空.
torch.nn.init.constant_(m.bias.data,0.0)## nn.init.constant_():表示将偏差定义为常量0.elif classname.find("BatchNorm2d")!=-1:## find():实现查找classname中是否含有BatchNorm2d字符,没有返回-1;有返回0.
torch.nn.init.normal_(m.weight.data,1.0,0.02)## m.weight.data表示需要初始化的权重. nn.init.normal_():表示随机初始化采用正态分布,均值为0,标准差为0.02.
torch.nn.init.constant_(m.bias.data,0.0)## nn.init.constant_():表示将偏差定义为常量0.################################ 残差块儿ResidualBlock##############################classResidualBlock(nn.Module):def__init__(self, in_features):super(ResidualBlock, self).__init__()
self.block = nn.Sequential(## block = [pad + conv + norm + relu + pad + conv + norm]
nn.ReflectionPad2d(1),## ReflectionPad2d():利用输入边界的反射来填充输入张量
nn.Conv2d(in_features, in_features,3),## 卷积
nn.InstanceNorm2d(in_features),## InstanceNorm2d():在图像像素上对HW做归一化,用在风格化迁移
nn.ReLU(inplace=True),## 非线性激活
nn.ReflectionPad2d(1),## ReflectionPad2d():利用输入边界的反射来填充输入张量
nn.Conv2d(in_features, in_features,3),## 卷积
nn.InstanceNorm2d(in_features),## InstanceNorm2d():在图像像素上对HW做归一化,用在风格化迁移)defforward(self, x):## 输入为 一张图像return x + self.block(x)## 输出为 图像加上网络的残差输出################################ 生成器网络GeneratorResNet##############################classGeneratorResNet(nn.Module):def__init__(self, input_shape, num_residual_blocks):## (input_shape = (3, 256, 256), num_residual_blocks = 9)super(GeneratorResNet, self).__init__()
channels = input_shape[0]## 输入通道数channels = 3## 初始化网络结构
out_features =64## 输出特征数out_features = 64
model =[## model = [Pad + Conv + Norm + ReLU]
nn.ReflectionPad2d(channels),## ReflectionPad2d(3):利用输入边界的反射来填充输入张量
nn.Conv2d(channels, out_features,7),## Conv2d(3, 64, 7)
nn.InstanceNorm2d(out_features),## InstanceNorm2d(64):在图像像素上对HW做归一化,用在风格化迁移
nn.ReLU(inplace=True),## 非线性激活]
in_features = out_features ## in_features = 64## 下采样,循环2次for _ inrange(2):
out_features *=2## out_features = 128 -> 256
model +=[## (Conv + Norm + ReLU) * 2
nn.Conv2d(in_features, out_features,3, stride=2, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True),]
in_features = out_features ## in_features = 256# 残差块儿,循环9次for _ inrange(num_residual_blocks):
model +=[ResidualBlock(out_features)]## model += [pad + conv + norm + relu + pad + conv + norm]# 上采样两次for _ inrange(2):
out_features //=2## out_features = 128 -> 64
model +=[## model += [Upsample + conv + norm + relu]
nn.Upsample(scale_factor=2),
nn.Conv2d(in_features, out_features,3, stride=1, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True),]
in_features = out_features ## out_features = 64## 网络输出层 ## model += [pad + conv + tanh]
model +=[nn.ReflectionPad2d(channels), nn.Conv2d(out_features, channels,7), nn.Tanh()]## 将(3)的数据每一个都映射到[-1, 1]之间
self.model = nn.Sequential(*model)defforward(self, x):## 输入(1, 3, 256, 256)return self.model(x)## 输出(1, 3, 256, 256)############################### Discriminator##############################classDiscriminator(nn.Module):def__init__(self, input_shape):super(Discriminator, self).__init__()
channels, height, width = input_shape ## input_shape:(3, 256, 256)# Calculate output shape of image discriminator (PatchGAN)
self.output_shape =(1, height //2**4, width //2**4)## output_shape = (1, 16, 16)defdiscriminator_block(in_filters, out_filters, normalize=True):## 鉴别器块儿"""Returns downsampling layers of each discriminator block"""
layers =[nn.Conv2d(in_filters, out_filters,4, stride=2, padding=1)]## layer += [conv + norm + relu] if normalize:## 每次卷积尺寸会缩小一半,共卷积了4次
layers.append(nn.InstanceNorm2d(out_filters))
layers.append(nn.LeakyReLU(0.2, inplace=True))return layers
self.model = nn.Sequential(*discriminator_block(channels,64, normalize=False),## layer += [conv(3, 64) + relu]*discriminator_block(64,128),## layer += [conv(64, 128) + norm + relu]*discriminator_block(128,256),## layer += [conv(128, 256) + norm + relu]*discriminator_block(256,512),## layer += [conv(256, 512) + norm + relu]
nn.ZeroPad2d((1,0,1,0)),## layer += [pad]
nn.Conv2d(512,1,4, padding=1)## layer += [conv(512, 1)])defforward(self, img):## 输入(1, 3, 256, 256) return self.model(img)## 输出(1, 1, 16, 16)# ## test# img_shape = (3, 256, 256)# n_residual_blocks = 9# G_AB = GeneratorResNet(img_shape, n_residual_blocks)# D_A = Discriminator(img_shape)# img = torch.rand((1, 3, 256, 256))# fake = G_AB(img)# print(fake.shape)# fake_D = D_A(img)# print(fake_D.shape)
datasets
其中的root代表着存放的文件夹,命名格式如:./datasets/facades
调用train_data_loader()函数即可,得到的是字典格式的数据,可以通过data[‘A’],和data[‘B’]操作将不同类型的图片取出来。
import glob
import random
import os
from torch.utils.data import Dataset
from PIL import Image
import torchvision.transforms as transforms
## 如果输入的数据集是灰度图像,将图片转化为rgb图像(本次采用的facades不需要这个)defto_rgb(image):
rgb_image = Image.new("RGB", image.size)
rgb_image.paste(image)return rgb_image
## 构建数据集classImageDataset(Dataset):def__init__(self, root, transforms_=None, unaligned=False, mode="train"):## (root = "./datasets/facades", unaligned=True:非对其数据)
self.transform = transforms.Compose(transforms_)## transform变为tensor数据
self.unaligned = unaligned
self.files_A =sorted(glob.glob(os.path.join(root,"%sA"% mode)+"/*.*"))## "./datasets/facades/trainA/*.*"
self.files_B =sorted(glob.glob(os.path.join(root,"%sB"% mode)+"/*.*"))## "./datasets/facades/trainB/*.*"def__getitem__(self, index):
image_A = Image.open(self.files_A[index %len(self.files_A)])## 在A中取一张照片if self.unaligned:## 如果采用非配对数据,在B中随机取一张
image_B = Image.open(self.files_B[random.randint(0,len(self.files_B)-1)])else:
image_B = Image.open(self.files_B[index %len(self.files_B)])# 如果是灰度图,把灰度图转换为RGB图if image_A.mode !="RGB":
image_A = to_rgb(image_A)if image_B.mode !="RGB":
image_B = to_rgb(image_B)# 把RGB图像转换为tensor图, 方便计算,返回字典数据
item_A = self.transform(image_A)
item_B = self.transform(image_B)return{"A": item_A,"B": item_B}## 获取A,B数据的长度def__len__(self):returnmax(len(self.files_A),len(self.files_B))
utils
这个模块设计了一个缓冲区,和学习率更新的函数
在更新discriminators的时候,用的是之前生成的图片,而不是最新的图片,所以设立图片缓冲区,可以存放50张之前生成的图片。
学习率初始为0.0003,总的epoch为50,在0-30的时候,学习率为0.0003,在30-50的时候,学习率逐渐线性减小为0,所以需要进行学习率的更新。
需要的变量有:总的训练epoch,当前的epoch,和开始进行衰减的epoch,即可实现lr的线性变化。
import random
import time
import datetime
import sys
from torch.autograd import Variable
import torch
import numpy as np
from torchvision.utils import save_image
## 先前生成的样本的缓冲区classReplayBuffer:def__init__(self, max_size=50):assert max_size >0,"Empty buffer or trying to create a black hole. Be careful."
self.max_size = max_size
self.data =[]defpush_and_pop(self, data):## 放入一张图像,再从buffer里取一张出来
to_return =[]## 确保数据的随机性,判断真假图片的鉴别器识别率for element in data.data:
element = torch.unsqueeze(element,0)iflen(self.data)< self.max_size:## 最多放入50张,没满就一直添加
self.data.append(element)
to_return.append(element)else:if random.uniform(0,1)>0.5:## 满了就1/2的概率从buffer里取,或者就用当前的输入图片
i = random.randint(0, self.max_size -1)
to_return.append(self.data[i].clone())
self.data[i]= element
else:
to_return.append(element)return Variable(torch.cat(to_return))## 设置学习率为初始学习率乘以给定lr_lambda函数的值classLambdaLR:def__init__(self, n_epochs, offset, decay_start_epoch):## (n_epochs = 50, offset = epoch, decay_start_epoch = 30)assert(n_epochs - decay_start_epoch)>0,"Decay must start before the training session ends!"## 断言,要让n_epochs > decay_start_epoch 才可以
self.n_epochs = n_epochs
self.offset = offset
self.decay_start_epoch = decay_start_epoch
defstep(self, epoch):## return 1-max(0, epoch - 30) / (50 - 30)return1.0-max(0, epoch + self.offset - self.decay_start_epoch)/(self.n_epochs - self.decay_start_epoch)
cycle_gan
这个是训练的函数,开始训练。
先配置下超参数,优化器,数据集,损失函数,然后开始训练
训练过程中打印日志,每100次保存测试集测试结果图片
训练完成后保存模型
import argparse
import os
from tkinter import Image
import numpy as np
import math
import itertools
import datetime
import time
import torchvision.transforms as transforms
from torchvision.utils import save_image, make_grid
from torch.utils.data import DataLoader
from torchvision import datasets
from torch.autograd import Variable
from models import*from dataset import*from utils import*import torch.nn as nn
import torch.nn.functional as F
import torch
from PIL import Image
## 超参数配置
parser = argparse.ArgumentParser()
parser.add_argument("--epoch",type=int, default=0,help="epoch to start training from")
parser.add_argument("--n_epochs",type=int, default=5,help="number of epochs of training")
parser.add_argument("--dataset_name",type=str, default="facades",help="name of the dataset")## ../input/facades-dataset
parser.add_argument("--batch_size",type=int, default=1,help="size of the batches")
parser.add_argument("--lr",type=float, default=0.0003,help="adam: learning rate")
parser.add_argument("--b1",type=float, default=0.5,help="adam: decay of first order momentum of gradient")
parser.add_argument("--b2",type=float, default=0.999,help="adam: decay of first order momentum of gradient")
parser.add_argument("--decay_epoch",type=int, default=3,help="epoch from which to start lr decay")
parser.add_argument("--n_cpu",type=int, default=2,help="number of cpu threads to use during batch generation")
parser.add_argument("--img_height",type=int, default=256,help="size of image height")
parser.add_argument("--img_width",type=int, default=256,help="size of image width")
parser.add_argument("--channels",type=int, default=3,help="number of image channels")
parser.add_argument("--sample_interval",type=int, default=100,help="interval between saving generator outputs")
parser.add_argument("--checkpoint_interval",type=int, default=-1,help="interval between saving model checkpoints")
parser.add_argument("--n_residual_blocks",type=int, default=9,help="number of residual blocks in generator")
parser.add_argument("--lambda_cyc",type=float, default=10.0,help="cycle loss weight")
parser.add_argument("--lambda_id",type=float, default=5.0,help="identity loss weight")
opt = parser.parse_args()# opt = parser.parse_args(args=[]) ## 在colab中运行时,换为此行print(opt)## 创建文件夹
os.makedirs("images/%s"% opt.dataset_name, exist_ok=True)
os.makedirs("save/%s"% opt.dataset_name, exist_ok=True)## input_shape:(3, 256, 256)
input_shape =(opt.channels, opt.img_height, opt.img_width)## 创建生成器,判别器对象
G_AB = GeneratorResNet(input_shape, opt.n_residual_blocks)
G_BA = GeneratorResNet(input_shape, opt.n_residual_blocks)
D_A = Discriminator(input_shape)
D_B = Discriminator(input_shape)## 损失函数## MES 二分类的交叉熵## L1loss 相比于L2 Loss保边缘
criterion_GAN = torch.nn.MSELoss()
criterion_cycle = torch.nn.L1Loss()
criterion_identity = torch.nn.L1Loss()## 如果有显卡,都在cuda模式中运行if torch.cuda.is_available():
G_AB = G_AB.cuda()
G_BA = G_BA.cuda()
D_A = D_A.cuda()
D_B = D_B.cuda()
criterion_GAN.cuda()
criterion_cycle.cuda()
criterion_identity.cuda()## 如果epoch == 0,初始化模型参数; 如果epoch == n, 载入训练到第n轮的预训练模型if opt.epoch !=0:# 载入训练到第n轮的预训练模型
G_AB.load_state_dict(torch.load("saved/%s/G_AB_%d.pth"%(opt.dataset_name, opt.epoch)))
G_BA.load_state_dict(torch.load("saved/%s/G_BA_%d.pth"%(opt.dataset_name, opt.epoch)))
D_A.load_state_dict(torch.load("saved/%s/D_A_%d.pth"%(opt.dataset_name, opt.epoch)))
D_B.load_state_dict(torch.load("saved/%s/D_B_%d.pth"%(opt.dataset_name, opt.epoch)))else:# 初始化模型参数
G_AB.apply(weights_init_normal)
G_BA.apply(weights_init_normal)
D_A.apply(weights_init_normal)
D_B.apply(weights_init_normal)## 定义优化函数,优化函数的学习率为0.0003
optimizer_G = torch.optim.Adam(
itertools.chain(G_AB.parameters(), G_BA.parameters()), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D_A = torch.optim.Adam(D_A.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D_B = torch.optim.Adam(D_B.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))## 学习率更行进程
lr_scheduler_G = torch.optim.lr_scheduler.LambdaLR(
optimizer_G, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)
lr_scheduler_D_A = torch.optim.lr_scheduler.LambdaLR(
optimizer_D_A, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)
lr_scheduler_D_B = torch.optim.lr_scheduler.LambdaLR(
optimizer_D_B, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)## 先前生成的样本的缓冲区
fake_A_buffer = ReplayBuffer()
fake_B_buffer = ReplayBuffer()## 图像 transformations
transforms_ =[
transforms.Resize(int(opt.img_height *1.12)),## 图片放大1.12倍
transforms.RandomCrop((opt.img_height, opt.img_width)),## 随机裁剪成原来的大小
transforms.RandomHorizontalFlip(),## 随机水平翻转
transforms.ToTensor(),## 变为Tensor数据
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5)),## 正则化]## Training data loader
dataloader = DataLoader(## 改成自己存放文件的目录
ImageDataset("datasets/facades", transforms_=transforms_, unaligned=True),## "./datasets/facades" , unaligned:设置非对其数据
batch_size=opt.batch_size,## batch_size = 1
shuffle=True,
num_workers=opt.n_cpu,)## Test data loader
val_dataloader = DataLoader(
ImageDataset("datasets/facades", transforms_=transforms_, unaligned=True, mode="test"),## "./datasets/facades"
batch_size=5,
shuffle=True,
num_workers=1,)## 每间隔100次打印图片defsample_images(batches_done):## (100/200/300/400...)"""保存测试集中生成的样本"""
imgs =next(iter(val_dataloader))## 取一张图像
G_AB.eval()
G_BA.eval()
real_A = Variable(imgs["A"]).cuda()## 取一张真A
fake_B = G_AB(real_A)## 用真A生成假B
real_B = Variable(imgs["B"]).cuda()## 去一张真B
fake_A = G_BA(real_B)## 用真B生成假A# Arange images along x-axis## make_grid():用于把几个图像按照网格排列的方式绘制出来
real_A = make_grid(real_A, nrow=5, normalize=True)
real_B = make_grid(real_B, nrow=5, normalize=True)
fake_A = make_grid(fake_A, nrow=5, normalize=True)
fake_B = make_grid(fake_B, nrow=5, normalize=True)# Arange images along y-axis## 把以上图像都拼接起来,保存为一张大图片
image_grid = torch.cat((real_A, fake_B, real_B, fake_A),1)
save_image(image_grid,"images/%s/%s.png"%(opt.dataset_name, batches_done), normalize=False)deftrain():# ----------# Training# ----------
prev_time = time.time()## 开始时间for epoch inrange(opt.epoch, opt.n_epochs):## for epoch in (0, 50)for i, batch inenumerate(dataloader):## batch is a dict, batch['A']:(1, 3, 256, 256), batch['B']:(1, 3, 256, 256)# print('here is %d' % i)## 读取数据集中的真图片## 将tensor变成Variable放入计算图中,tensor变成variable之后才能进行反向传播求梯度
real_A = Variable(batch["A"]).cuda()## 真图像A
real_B = Variable(batch["B"]).cuda()## 真图像B## 全真,全假的标签
valid = Variable(torch.ones((real_A.size(0),*D_A.output_shape)), requires_grad=False).cuda()## 定义真实的图片label为1 ones((1, 1, 16, 16))
fake = Variable(torch.zeros((real_A.size(0),*D_A.output_shape)), requires_grad=False).cuda()## 定义假的图片的label为0 zeros((1, 1, 16, 16))## -----------------## Train Generator## 原理:目的是希望生成的假的图片被判别器判断为真的图片,## 在此过程中,将判别器固定,将假的图片传入判别器的结果与真实的label对应,## 反向传播更新的参数是生成网络里面的参数,## 这样可以通过更新生成网络里面的参数,来训练网络,使得生成的图片让判别器以为是真的, 这样就达到了对抗的目的## -----------------
G_AB.train()
G_BA.train()## Identity loss ## A风格的图像 放在 B -> A 生成器中,生成的图像也要是 A风格
loss_id_A = criterion_identity(G_BA(real_A), real_A)## loss_id_A就是把图像A1放入 B2A 的生成器中,那当然生成图像A2的风格也得是A风格, 要让A1,A2的差距很小
loss_id_B = criterion_identity(G_AB(real_B), real_B)
loss_identity =(loss_id_A + loss_id_B)/2## Identity loss ## GAN loss
fake_B = G_AB(real_A)## 用真图像A生成的假图像B
loss_GAN_AB = criterion_GAN(D_B(fake_B), valid)## 用B鉴别器鉴别假图像B,训练生成器的目的就是要让鉴别器以为假的是真的,假的太接近真的让鉴别器分辨不出来
fake_A = G_BA(real_B)## 用真图像B生成的假图像A
loss_GAN_BA = criterion_GAN(D_A(fake_A), valid)## 用A鉴别器鉴别假图像A,训练生成器的目的就是要让鉴别器以为假的是真的,假的太接近真的让鉴别器分辨不出来
loss_GAN =(loss_GAN_AB + loss_GAN_BA)/2## GAN loss# Cycle loss 循环一致性损失
recov_A = G_BA(fake_B)## 之前中realA 通过 A -> B 生成的假图像B,再经过 B -> A ,使得fakeB 得到的循环图像recovA,
loss_cycle_A = criterion_cycle(recov_A, real_A)## realA和recovA的差距应该很小,以保证A,B间不仅风格有所变化,而且图片对应的的细节也可以保留
recov_B = G_AB(fake_A)
loss_cycle_B = criterion_cycle(recov_B, real_B)
loss_cycle =(loss_cycle_A + loss_cycle_B)/2# Total loss ## 就是上面所有的损失都加起来
loss_G = loss_GAN + opt.lambda_cyc * loss_cycle + opt.lambda_id * loss_identity
optimizer_G.zero_grad()## 在反向传播之前,先将梯度归0
loss_G.backward()## 将误差反向传播
optimizer_G.step()## 更新参数## -----------------------## Train Discriminator A## 分为两部分:1、真的图像判别为真;2、假的图像判别为假## -----------------------## 真的图像判别为真
loss_real = criterion_GAN(D_A(real_A), valid)## 假的图像判别为假(从之前的buffer缓存中随机取一张)
fake_A_ = fake_A_buffer.push_and_pop(fake_A)
loss_fake = criterion_GAN(D_A(fake_A_.detach()), fake)# Total loss
loss_D_A =(loss_real + loss_fake)/2
optimizer_D_A.zero_grad()## 在反向传播之前,先将梯度归0
loss_D_A.backward()## 将误差反向传播
optimizer_D_A.step()## 更新参数## -----------------------## Train Discriminator B## 分为两部分:1、真的图像判别为真;2、假的图像判别为假## -----------------------# 真的图像判别为真
loss_real = criterion_GAN(D_B(real_B), valid)## 假的图像判别为假(从之前的buffer缓存中随机取一张)
fake_B_ = fake_B_buffer.push_and_pop(fake_B)
loss_fake = criterion_GAN(D_B(fake_B_.detach()), fake)# Total loss
loss_D_B =(loss_real + loss_fake)/2
optimizer_D_B.zero_grad()## 在反向传播之前,先将梯度归0
loss_D_B.backward()## 将误差反向传播
optimizer_D_B.step()## 更新参数
loss_D =(loss_D_A + loss_D_B)/2## ----------------------## 打印日志Log Progress## ----------------------## 确定剩下的大约时间 假设当前 epoch = 5, i = 100
batches_done = epoch *len(dataloader)+ i ## 已经训练了多长时间 5 * 400 + 100 次
batches_left = opt.n_epochs *len(dataloader)- batches_done ## 还剩下 50 * 400 - 2100 次
time_left = datetime.timedelta(seconds=batches_left *(time.time()- prev_time))## 还需要的时间 time_left = 剩下的次数 * 每次的时间
prev_time = time.time()# Print log
sys.stdout.write("\r[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f, adv: %f, cycle: %f, identity: %f] ETA: %s"%(
epoch,
opt.n_epochs,
i,len(dataloader),
loss_D.item(),
loss_G.item(),
loss_GAN.item(),
loss_cycle.item(),
loss_identity.item(),
time_left,))# 每训练100张就保存一组测试集中的图片if batches_done % opt.sample_interval ==0:
sample_images(batches_done)# 更新学习率
lr_scheduler_G.step()
lr_scheduler_D_A.step()
lr_scheduler_D_B.step()## 训练结束后,保存模型
torch.save(G_AB.state_dict(),"save/%s/G_AB_%d.pth"%(opt.dataset_name, epoch))
torch.save(G_BA.state_dict(),"save/%s/G_BA_%d.pth"%(opt.dataset_name, epoch))
torch.save(D_A.state_dict(),"save/%s/D_A_%d.pth"%(opt.dataset_name, epoch))
torch.save(D_B.state_dict(),"save/%s/D_B_%d.pth"%(opt.dataset_name, epoch))print("save my model finished !!")# ## 每间隔几个epoch保存一次模型# if opt.checkpoint_interval != -1 and epoch % opt.checkpoint_interval == 0:# # Save model checkpoints# torch.save(G_AB.state_dict(), "saved_models/%s/G_AB_%d.pth" % (opt.dataset_name, epoch))# torch.save(G_BA.state_dict(), "saved_models/%s/G_BA_%d.pth" % (opt.dataset_name, epoch))# torch.save(D_A.state_dict(), "saved_models/%s/D_A_%d.pth" % (opt.dataset_name, epoch))# torch.save(D_B.state_dict(), "saved_models/%s/D_B_%d.pth" % (opt.dataset_name, epoch))## 函数的起始if __name__ =='__main__':
train()
test
测试过程,实际上就是用之前训练好的生成器模型参数,放入到一个新的生成器中,把图片放进去看对应生成图片的效果,测试不需要鉴别器。把生成后的图片放入到output/A,output/B文件夹中去。
import argparse
import torch
import os
from torchvision import transforms
from torch.utils.data import DataLoader
from torchvision.utils import save_image
from torch.autograd import Variable
from models import GeneratorResNet
from dataset import ImageDataset
deftest():## 超参数设置
parser = argparse.ArgumentParser()
parser.add_argument('--batchSize',type=int, default=1,help='size of the batches')
parser.add_argument('--dataroot',type=str, default='D:/XCH/GAN_ZOO/datasets/facades',help='root directory of the dataset')
parser.add_argument('--channels',type=int, default=3,help='number of channels of input data')
parser.add_argument('--n_residual_blocks',type=int, default=9,help='number of channels of output data')
parser.add_argument('--size',type=int, default=256,help='size of the data (squared assumed)')
parser.add_argument('--cuda',type=bool, default=True,help='use GPU computation')
parser.add_argument('--n_cpu',type=int, default=8,help='number of cpu threads to use during batch generation')
parser.add_argument('--generator_A2B',type=str, default='D:/XCH/GAN_ZOO/save/facades/G_AB_4.pth',help='A2B generator checkpoint file')
parser.add_argument('--generator_B2A',type=str, default='D:/XCH/GAN_ZOO/save/facades/G_BA_4.pth',help='B2A generator checkpoint file')
opt = parser.parse_args()print(opt)################################### test准备工作 ##################################### input_shape:(3, 256, 256)
input_shape =(opt.channels, opt.size, opt.size)## 创建生成器,判别器对象
netG_A2B = GeneratorResNet(input_shape, opt.n_residual_blocks)
netG_B2A = GeneratorResNet(input_shape, opt.n_residual_blocks)## 使用cudaif opt.cuda:
netG_A2B.cuda()
netG_B2A.cuda()## 载入训练模型参数
netG_A2B.load_state_dict(torch.load(opt.generator_A2B))
netG_B2A.load_state_dict(torch.load(opt.generator_B2A))## 设置为测试模式
netG_A2B.eval()
netG_B2A.eval()## 创建一个tensor数组
Tensor = torch.cuda.FloatTensor if opt.cuda else torch.Tensor
input_A = Tensor(opt.batchSize, opt.channels, opt.size, opt.size)
input_B = Tensor(opt.batchSize, opt.channels, opt.size, opt.size)'''构建测试数据集'''
transforms_ =[ transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))]
dataloader = DataLoader(ImageDataset(opt.dataroot, transforms_=transforms_, mode='test'),
batch_size=opt.batchSize, shuffle=False, num_workers=opt.n_cpu)################################### test开始 ###################################'''如果文件路径不存在, 则创建一个 (存放测试输出的图片)'''ifnot os.path.exists('output/A'):
os.makedirs('output/A')ifnot os.path.exists('output/B'):
os.makedirs('output/B')for i, batch inenumerate(dataloader):## 输入数据 real
real_A = Variable(input_A.copy_(batch['A']))
real_B = Variable(input_B.copy_(batch['B']))## 通过生成器生成的 fake
fake_B =0.5*(netG_A2B(real_A).data +1.0)
fake_A =0.5*(netG_B2A(real_B).data +1.0)## 保存图片
save_image(fake_A,'output/A/%04d.png'%(i+1))
save_image(fake_B,'output/B/%04d.png'%(i+1))print('processing (%04d)-th image...'%(i))print("测试完成")if __name__ =='__main__':
test()
训练结果
(只训练了5个周期,节省时间)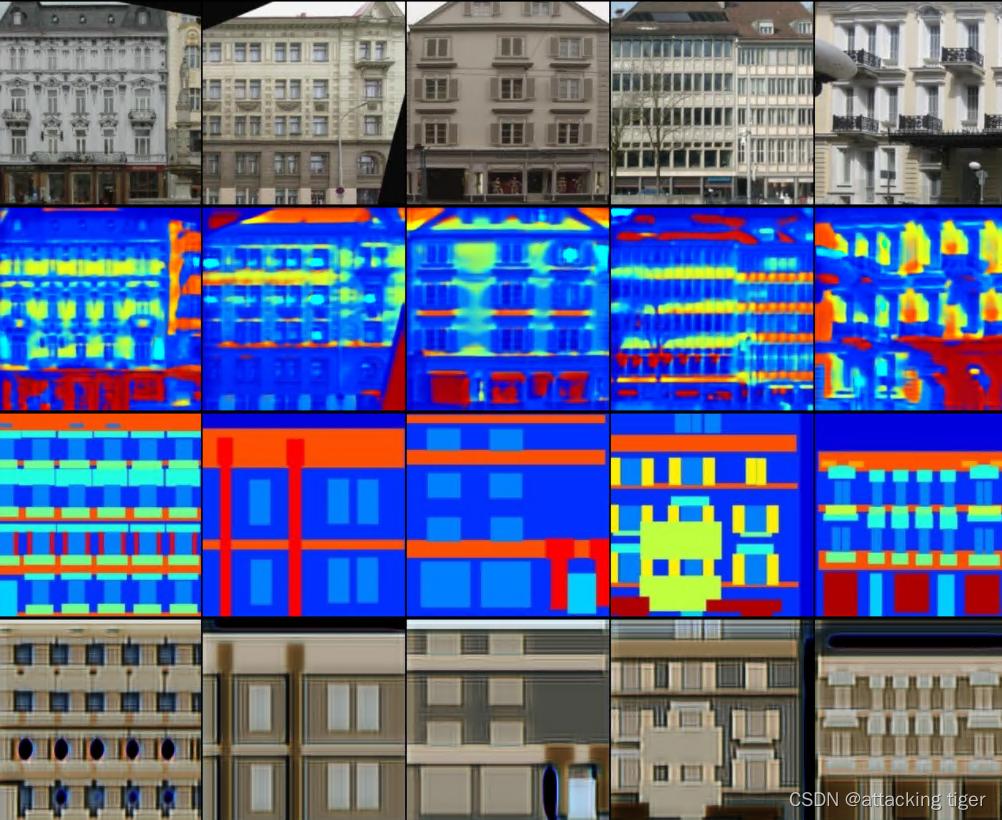
放在一个文件里
import os
import glob
import random
import torch
import itertools
import datetime
import time
import sys
import argparse
import numpy as np
import torch.nn.functional as F
import torch.nn as nn
import torchvision.transforms as transforms
from torch.utils.data import Dataset
from torch.utils.data import DataLoader
from torch.autograd import Variable
from PIL import Image
from torchvision.utils import save_image, make_grid
##################################################################################################### datasets.py ##################################### 如果输入的数据集是灰度图像,将图片转化为rgb图像(本次采用的facades不需要这个)defto_rgb(image):
rgb_image = Image.new("RGB", image.size)
rgb_image.paste(image)return rgb_image
## 构建数据集classImageDataset(Dataset):def__init__(self, root, transforms_=None, unaligned=False, mode="train"):## (root = "./datasets/facades", unaligned=True:非对其数据)
self.transform = transforms.Compose(transforms_)## transform变为tensor数据
self.unaligned = unaligned
self.files_A =sorted(glob.glob(os.path.join(root,"%sA"% mode)+"/*.*"))## "./datasets/facades/trainA/*.*"
self.files_B =sorted(glob.glob(os.path.join(root,"%sB"% mode)+"/*.*"))## "./datasets/facades/trainB/*.*"def__getitem__(self, index):
image_A = Image.open(self.files_A[index %len(self.files_A)])## 在A中取一张照片if self.unaligned:## 如果采用非配对数据,在B中随机取一张
image_B = Image.open(self.files_B[random.randint(0,len(self.files_B)-1)])else:
image_B = Image.open(self.files_B[index %len(self.files_B)])# 如果是灰度图,把灰度图转换为RGB图if image_A.mode !="RGB":
image_A = to_rgb(image_A)if image_B.mode !="RGB":
image_B = to_rgb(image_B)# 把RGB图像转换为tensor图, 方便计算,返回字典数据
item_A = self.transform(image_A)
item_B = self.transform(image_B)return{"A": item_A,"B": item_B}## 获取A,B数据的长度def__len__(self):returnmax(len(self.files_A),len(self.files_B))##################################################################################################### models.py ##################################### 定义参数初始化函数defweights_init_normal(m):
classname = m.__class__.__name__ ## m作为一个形参,原则上可以传递很多的内容, 为了实现多实参传递,每一个moudle要给出自己的name. 所以这句话就是返回m的名字. if classname.find("Conv")!=-1:## find():实现查找classname中是否含有Conv字符,没有返回-1;有返回0.
torch.nn.init.normal_(m.weight.data,0.0,0.02)## m.weight.data表示需要初始化的权重。nn.init.normal_():表示随机初始化采用正态分布,均值为0,标准差为0.02.ifhasattr(m,"bias")and m.bias isnotNone:## hasattr():用于判断m是否包含对应的属性bias, 以及bias属性是否不为空.
torch.nn.init.constant_(m.bias.data,0.0)## nn.init.constant_():表示将偏差定义为常量0.elif classname.find("BatchNorm2d")!=-1:## find():实现查找classname中是否含有BatchNorm2d字符,没有返回-1;有返回0.
torch.nn.init.normal_(m.weight.data,1.0,0.02)## m.weight.data表示需要初始化的权重. nn.init.normal_():表示随机初始化采用正态分布,均值为0,标准差为0.02.
torch.nn.init.constant_(m.bias.data,0.0)## nn.init.constant_():表示将偏差定义为常量0.################################ 残差块儿ResidualBlock##############################classResidualBlock(nn.Module):def__init__(self, in_features):super(ResidualBlock, self).__init__()
self.block = nn.Sequential(## block = [pad + conv + norm + relu + pad + conv + norm]
nn.ReflectionPad2d(1),## ReflectionPad2d():利用输入边界的反射来填充输入张量
nn.Conv2d(in_features, in_features,3),## 卷积
nn.InstanceNorm2d(in_features),## InstanceNorm2d():在图像像素上对HW做归一化,用在风格化迁移
nn.ReLU(inplace=True),## 非线性激活
nn.ReflectionPad2d(1),## ReflectionPad2d():利用输入边界的反射来填充输入张量
nn.Conv2d(in_features, in_features,3),## 卷积
nn.InstanceNorm2d(in_features),## InstanceNorm2d():在图像像素上对HW做归一化,用在风格化迁移)defforward(self, x):## 输入为 一张图像return x + self.block(x)## 输出为 图像加上网络的残差输出################################ 生成器网络GeneratorResNet##############################classGeneratorResNet(nn.Module):def__init__(self, input_shape, num_residual_blocks):## (input_shape = (3, 256, 256), num_residual_blocks = 9)super(GeneratorResNet, self).__init__()
channels = input_shape[0]## 输入通道数channels = 3## 初始化网络结构
out_features =64## 输出特征数out_features = 64
model =[## model = [Pad + Conv + Norm + ReLU]
nn.ReflectionPad2d(channels),## ReflectionPad2d(3):利用输入边界的反射来填充输入张量
nn.Conv2d(channels, out_features,7),## Conv2d(3, 64, 7)
nn.InstanceNorm2d(out_features),## InstanceNorm2d(64):在图像像素上对HW做归一化,用在风格化迁移
nn.ReLU(inplace=True),## 非线性激活]
in_features = out_features ## in_features = 64## 下采样,循环2次for _ inrange(2):
out_features *=2## out_features = 128 -> 256
model +=[## (Conv + Norm + ReLU) * 2
nn.Conv2d(in_features, out_features,3, stride=2, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True),]
in_features = out_features ## in_features = 256# 残差块儿,循环9次for _ inrange(num_residual_blocks):
model +=[ResidualBlock(out_features)]## model += [pad + conv + norm + relu + pad + conv + norm]# 上采样两次for _ inrange(2):
out_features //=2## out_features = 128 -> 64
model +=[## model += [Upsample + conv + norm + relu]
nn.Upsample(scale_factor=2),
nn.Conv2d(in_features, out_features,3, stride=1, padding=1),
nn.InstanceNorm2d(out_features),
nn.ReLU(inplace=True),]
in_features = out_features ## out_features = 64## 网络输出层 ## model += [pad + conv + tanh]
model +=[nn.ReflectionPad2d(channels), nn.Conv2d(out_features, channels,7), nn.Tanh()]## 将(3)的数据每一个都映射到[-1, 1]之间
self.model = nn.Sequential(*model)defforward(self, x):## 输入(1, 3, 256, 256)return self.model(x)## 输出(1, 3, 256, 256)############################### Discriminator##############################classDiscriminator(nn.Module):def__init__(self, input_shape):super(Discriminator, self).__init__()
channels, height, width = input_shape ## input_shape:(3, 256, 256)# Calculate output shape of image discriminator (PatchGAN)
self.output_shape =(1, height //2**4, width //2**4)## output_shape = (1, 16, 16)defdiscriminator_block(in_filters, out_filters, normalize=True):## 鉴别器块儿"""Returns downsampling layers of each discriminator block"""
layers =[nn.Conv2d(in_filters, out_filters,4, stride=2, padding=1)]## layer += [conv + norm + relu] if normalize:## 每次卷积尺寸会缩小一半,共卷积了4次
layers.append(nn.InstanceNorm2d(out_filters))
layers.append(nn.LeakyReLU(0.2, inplace=True))return layers
self.model = nn.Sequential(*discriminator_block(channels,64, normalize=False),## layer += [conv(3, 64) + relu]*discriminator_block(64,128),## layer += [conv(64, 128) + norm + relu]*discriminator_block(128,256),## layer += [conv(128, 256) + norm + relu]*discriminator_block(256,512),## layer += [conv(256, 512) + norm + relu]
nn.ZeroPad2d((1,0,1,0)),## layer += [pad]
nn.Conv2d(512,1,4, padding=1)## layer += [conv(512, 1)])defforward(self, img):## 输入(1, 3, 256, 256) return self.model(img)## 输出(1, 1, 16, 16)##################################################################################################### utils.py ##################################### 先前生成的样本的缓冲区classReplayBuffer:def__init__(self, max_size=50):assert max_size >0,"Empty buffer or trying to create a black hole. Be careful."
self.max_size = max_size
self.data =[]defpush_and_pop(self, data):## 放入一张图像,再从buffer里取一张出来
to_return =[]## 确保数据的随机性,判断真假图片的鉴别器识别率for element in data.data:
element = torch.unsqueeze(element,0)iflen(self.data)< self.max_size:## 最多放入50张,没满就一直添加
self.data.append(element)
to_return.append(element)else:if random.uniform(0,1)>0.5:## 满了就1/2的概率从buffer里取,或者就用当前的输入图片
i = random.randint(0, self.max_size -1)
to_return.append(self.data[i].clone())
self.data[i]= element
else:
to_return.append(element)return Variable(torch.cat(to_return))## 设置学习率为初始学习率乘以给定lr_lambda函数的值classLambdaLR:def__init__(self, n_epochs, offset, decay_start_epoch):## (n_epochs = 50, offset = epoch, decay_start_epoch = 30)assert(n_epochs - decay_start_epoch)>0,"Decay must start before the training session ends!"## 断言,要让n_epochs > decay_start_epoch 才可以
self.n_epochs = n_epochs
self.offset = offset
self.decay_start_epoch = decay_start_epoch
defstep(self, epoch):## return 1-max(0, epoch - 30) / (50 - 30)return1.0-max(0, epoch + self.offset - self.decay_start_epoch)/(self.n_epochs - self.decay_start_epoch)####################################################################################################### cycle_gan.py ##################################### 超参数配置
parser = argparse.ArgumentParser()
parser.add_argument("--epoch",type=int, default=0,help="epoch to start training from")
parser.add_argument("--n_epochs",type=int, default=5,help="number of epochs of training")
parser.add_argument("--dataset_name",type=str, default="dataset/facades",help="name of the dataset")## ../input/facades-dataset
parser.add_argument("--batch_size",type=int, default=1,help="size of the batches")
parser.add_argument("--lr",type=float, default=0.0003,help="adam: learning rate")
parser.add_argument("--b1",type=float, default=0.5,help="adam: decay of first order momentum of gradient")
parser.add_argument("--b2",type=float, default=0.999,help="adam: decay of first order momentum of gradient")
parser.add_argument("--decay_epoch",type=int, default=3,help="epoch from which to start lr decay")
parser.add_argument("--n_cpu",type=int, default=2,help="number of cpu threads to use during batch generation")
parser.add_argument("--img_height",type=int, default=256,help="size of image height")
parser.add_argument("--img_width",type=int, default=256,help="size of image width")
parser.add_argument("--channels",type=int, default=3,help="number of image channels")
parser.add_argument("--sample_interval",type=int, default=100,help="interval between saving generator outputs")
parser.add_argument("--checkpoint_interval",type=int, default=-1,help="interval between saving model checkpoints")
parser.add_argument("--n_residual_blocks",type=int, default=9,help="number of residual blocks in generator")
parser.add_argument("--lambda_cyc",type=float, default=10.0,help="cycle loss weight")
parser.add_argument("--lambda_id",type=float, default=5.0,help="identity loss weight")
opt = parser.parse_args()# opt = parser.parse_args(args=[]) ## 在colab中运行时,换为此行print(opt)## 创建文件夹
os.makedirs("images/%s"% opt.dataset_name, exist_ok=True)
os.makedirs("save/%s"% opt.dataset_name, exist_ok=True)## input_shape:(3, 256, 256)
input_shape =(opt.channels, opt.img_height, opt.img_width)## 创建生成器,判别器对象
G_AB = GeneratorResNet(input_shape, opt.n_residual_blocks)
G_BA = GeneratorResNet(input_shape, opt.n_residual_blocks)
D_A = Discriminator(input_shape)
D_B = Discriminator(input_shape)## 损失函数## MES 二分类的交叉熵## L1loss 相比于L2 Loss保边缘
criterion_GAN = torch.nn.MSELoss()
criterion_cycle = torch.nn.L1Loss()
criterion_identity = torch.nn.L1Loss()## 如果有显卡,都在cuda模式中运行if torch.cuda.is_available():
G_AB = G_AB.cuda()
G_BA = G_BA.cuda()
D_A = D_A.cuda()
D_B = D_B.cuda()
criterion_GAN.cuda()
criterion_cycle.cuda()
criterion_identity.cuda()## 如果epoch == 0,初始化模型参数; 如果epoch == n, 载入训练到第n轮的预训练模型if opt.epoch !=0:# 载入训练到第n轮的预训练模型
G_AB.load_state_dict(torch.load("save/%s/G_AB_%d.pth"%(opt.dataset_name, opt.epoch)))
G_BA.load_state_dict(torch.load("save/%s/G_BA_%d.pth"%(opt.dataset_name, opt.epoch)))
D_A.load_state_dict(torch.load("save/%s/D_A_%d.pth"%(opt.dataset_name, opt.epoch)))
D_B.load_state_dict(torch.load("save/%s/D_B_%d.pth"%(opt.dataset_name, opt.epoch)))else:# 初始化模型参数
G_AB.apply(weights_init_normal)
G_BA.apply(weights_init_normal)
D_A.apply(weights_init_normal)
D_B.apply(weights_init_normal)## 定义优化函数,优化函数的学习率为0.0003
optimizer_G = torch.optim.Adam(
itertools.chain(G_AB.parameters(), G_BA.parameters()), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D_A = torch.optim.Adam(D_A.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D_B = torch.optim.Adam(D_B.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))## 学习率更行进程
lr_scheduler_G = torch.optim.lr_scheduler.LambdaLR(
optimizer_G, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)
lr_scheduler_D_A = torch.optim.lr_scheduler.LambdaLR(
optimizer_D_A, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)
lr_scheduler_D_B = torch.optim.lr_scheduler.LambdaLR(
optimizer_D_B, lr_lambda=LambdaLR(opt.n_epochs, opt.epoch, opt.decay_epoch).step
)## 先前生成的样本的缓冲区
fake_A_buffer = ReplayBuffer()
fake_B_buffer = ReplayBuffer()## 图像 transformations
transforms_ =[
transforms.Resize(int(opt.img_height *1.12)),## 图片放大1.12倍
transforms.RandomCrop((opt.img_height, opt.img_width)),## 随机裁剪成原来的大小
transforms.RandomHorizontalFlip(),## 随机水平翻转
transforms.ToTensor(),## 变为Tensor数据
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5)),## 正则化]## Training data loader
dataloader = DataLoader(## 改成自己存放文件的目录
ImageDataset("dataset/facades", transforms_=transforms_, unaligned=True),## "./datasets/facades" , unaligned:设置非对其数据
batch_size=opt.batch_size,## batch_size = 1
shuffle=True,
num_workers=opt.n_cpu,)## Test data loader
val_dataloader = DataLoader(
ImageDataset("dataset/facades", transforms_=transforms_, unaligned=True, mode="test"),## "./datasets/facades"
batch_size=5,
shuffle=True,
num_workers=1,)## 每间隔100次打印图片defsample_images(batches_done):## (100/200/300/400...)"""保存测试集中生成的样本"""
imgs =next(iter(val_dataloader))## 取一张图像
G_AB.eval()
G_BA.eval()
real_A = Variable(imgs["A"]).cuda()## 取一张真A
fake_B = G_AB(real_A)## 用真A生成假B
real_B = Variable(imgs["B"]).cuda()## 去一张真B
fake_A = G_BA(real_B)## 用真B生成假A# Arange images along x-axis## make_grid():用于把几个图像按照网格排列的方式绘制出来
real_A = make_grid(real_A, nrow=5, normalize=True)
real_B = make_grid(real_B, nrow=5, normalize=True)
fake_A = make_grid(fake_A, nrow=5, normalize=True)
fake_B = make_grid(fake_B, nrow=5, normalize=True)# Arange images along y-axis## 把以上图像都拼接起来,保存为一张大图片
image_grid = torch.cat((real_A, fake_B, real_B, fake_A),1)
save_image(image_grid,"images/%s/%s.png"%(opt.dataset_name, batches_done), normalize=False)deftrain():# ----------# Training# ----------
prev_time = time.time()## 开始时间for epoch inrange(opt.epoch, opt.n_epochs):## for epoch in (0, 50)for i, batch inenumerate(dataloader):## batch is a dict, batch['A']:(1, 3, 256, 256), batch['B']:(1, 3, 256, 256)# print('here is %d' % i)## 读取数据集中的真图片## 将tensor变成Variable放入计算图中,tensor变成variable之后才能进行反向传播求梯度
real_A = Variable(batch["A"]).cuda()## 真图像A
real_B = Variable(batch["B"]).cuda()## 真图像B## 全真,全假的标签
valid = Variable(torch.ones((real_A.size(0),*D_A.output_shape)), requires_grad=False).cuda()## 定义真实的图片label为1 ones((1, 1, 16, 16))
fake = Variable(torch.zeros((real_A.size(0),*D_A.output_shape)), requires_grad=False).cuda()## 定义假的图片的label为0 zeros((1, 1, 16, 16))## -----------------## Train Generator## 原理:目的是希望生成的假的图片被判别器判断为真的图片,## 在此过程中,将判别器固定,将假的图片传入判别器的结果与真实的label对应,## 反向传播更新的参数是生成网络里面的参数,## 这样可以通过更新生成网络里面的参数,来训练网络,使得生成的图片让判别器以为是真的, 这样就达到了对抗的目的## -----------------
G_AB.train()
G_BA.train()## Identity loss ## A风格的图像 放在 B -> A 生成器中,生成的图像也要是 A风格
loss_id_A = criterion_identity(G_BA(real_A), real_A)## loss_id_A就是把图像A1放入 B2A 的生成器中,那当然生成图像A2的风格也得是A风格, 要让A1,A2的差距很小
loss_id_B = criterion_identity(G_AB(real_B), real_B)
loss_identity =(loss_id_A + loss_id_B)/2## Identity loss ## GAN loss
fake_B = G_AB(real_A)## 用真图像A生成的假图像B
loss_GAN_AB = criterion_GAN(D_B(fake_B), valid)## 用B鉴别器鉴别假图像B,训练生成器的目的就是要让鉴别器以为假的是真的,假的太接近真的让鉴别器分辨不出来
fake_A = G_BA(real_B)## 用真图像B生成的假图像A
loss_GAN_BA = criterion_GAN(D_A(fake_A), valid)## 用A鉴别器鉴别假图像A,训练生成器的目的就是要让鉴别器以为假的是真的,假的太接近真的让鉴别器分辨不出来
loss_GAN =(loss_GAN_AB + loss_GAN_BA)/2## GAN loss# Cycle loss 循环一致性损失
recov_A = G_BA(fake_B)## 之前中realA 通过 A -> B 生成的假图像B,再经过 B -> A ,使得fakeB 得到的循环图像recovA,
loss_cycle_A = criterion_cycle(recov_A, real_A)## realA和recovA的差距应该很小,以保证A,B间不仅风格有所变化,而且图片对应的的细节也可以保留
recov_B = G_AB(fake_A)
loss_cycle_B = criterion_cycle(recov_B, real_B)
loss_cycle =(loss_cycle_A + loss_cycle_B)/2# Total loss ## 就是上面所有的损失都加起来
loss_G = loss_GAN + opt.lambda_cyc * loss_cycle + opt.lambda_id * loss_identity
optimizer_G.zero_grad()## 在反向传播之前,先将梯度归0
loss_G.backward()## 将误差反向传播
optimizer_G.step()## 更新参数## -----------------------## Train Discriminator A## 分为两部分:1、真的图像判别为真;2、假的图像判别为假## -----------------------## 真的图像判别为真
loss_real = criterion_GAN(D_A(real_A), valid)## 假的图像判别为假(从之前的buffer缓存中随机取一张)
fake_A_ = fake_A_buffer.push_and_pop(fake_A)
loss_fake = criterion_GAN(D_A(fake_A_.detach()), fake)# Total loss
loss_D_A =(loss_real + loss_fake)/2
optimizer_D_A.zero_grad()## 在反向传播之前,先将梯度归0
loss_D_A.backward()## 将误差反向传播
optimizer_D_A.step()## 更新参数## -----------------------## Train Discriminator B## 分为两部分:1、真的图像判别为真;2、假的图像判别为假## -----------------------# 真的图像判别为真
loss_real = criterion_GAN(D_B(real_B), valid)## 假的图像判别为假(从之前的buffer缓存中随机取一张)
fake_B_ = fake_B_buffer.push_and_pop(fake_B)
loss_fake = criterion_GAN(D_B(fake_B_.detach()), fake)# Total loss
loss_D_B =(loss_real + loss_fake)/2
optimizer_D_B.zero_grad()## 在反向传播之前,先将梯度归0
loss_D_B.backward()## 将误差反向传播
optimizer_D_B.step()## 更新参数
loss_D =(loss_D_A + loss_D_B)/2## ----------------------## 打印日志Log Progress## ----------------------## 确定剩下的大约时间 假设当前 epoch = 5, i = 100
batches_done = epoch *len(dataloader)+ i ## 已经训练了多长时间 5 * 400 + 100 次
batches_left = opt.n_epochs *len(dataloader)- batches_done ## 还剩下 50 * 400 - 2100 次
time_left = datetime.timedelta(seconds=batches_left *(time.time()- prev_time))## 还需要的时间 time_left = 剩下的次数 * 每次的时间
prev_time = time.time()# Print log
sys.stdout.write("\r[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f, adv: %f, cycle: %f, identity: %f] ETA: %s"%(
epoch,
opt.n_epochs,
i,len(dataloader),
loss_D.item(),
loss_G.item(),
loss_GAN.item(),
loss_cycle.item(),
loss_identity.item(),
time_left,))# 每训练100张就保存一组测试集中的图片if batches_done % opt.sample_interval ==0:
sample_images(batches_done)# 更新学习率
lr_scheduler_G.step()
lr_scheduler_D_A.step()
lr_scheduler_D_B.step()## 训练结束后,保存模型
torch.save(G_AB.state_dict(),"save/%s/G_AB_%d.pth"%(opt.dataset_name, epoch))
torch.save(G_BA.state_dict(),"save/%s/G_BA_%d.pth"%(opt.dataset_name, epoch))
torch.save(D_A.state_dict(),"save/%s/D_A_%d.pth"%(opt.dataset_name, epoch))
torch.save(D_B.state_dict(),"save/%s/D_B_%d.pth"%(opt.dataset_name, epoch))print("\nsave my model finished !!")# ## 每间隔几个epoch保存一次模型# if opt.checkpoint_interval != -1 and epoch % opt.checkpoint_interval == 0:# # Save model checkpoints# torch.save(G_AB.state_dict(), "saved_models/%s/G_AB_%d.pth" % (opt.dataset_name, epoch))# torch.save(G_BA.state_dict(), "saved_models/%s/G_BA_%d.pth" % (opt.dataset_name, epoch))# torch.save(D_A.state_dict(), "saved_models/%s/D_A_%d.pth" % (opt.dataset_name, epoch))# torch.save(D_B.state_dict(), "saved_models/%s/D_B_%d.pth" % (opt.dataset_name, epoch))deftest():## 超参数设置
parser = argparse.ArgumentParser()
parser.add_argument('--batchSize',type=int, default=2,help='size of the batches')
parser.add_argument('--dataroot',type=str, default='dataset/facades',help='root directory of the dataset')
parser.add_argument('--channels',type=int, default=3,help='number of channels of input data')
parser.add_argument('--n_residual_blocks',type=int, default=9,help='number of channels of output data')
parser.add_argument('--size',type=int, default=256,help='size of the data (squared assumed)')
parser.add_argument('--cuda',type=bool, default=True,help='use GPU computation')
parser.add_argument('--n_cpu',type=int, default=8,help='number of cpu threads to use during batch generation')
parser.add_argument('--generator_A2B',type=str, default='save/dataset/facades/G_AB_4.pth',help='A2B generator checkpoint file')
parser.add_argument('--generator_B2A',type=str, default='save/dataset/facades/G_BA_4.pth',help='B2A generator checkpoint file')
opt = parser.parse_args()print(opt)################################### test准备工作 ##################################### input_shape:(3, 256, 256)
input_shape =(opt.channels, opt.size, opt.size)## 创建生成器,判别器对象
netG_A2B = GeneratorResNet(input_shape, opt.n_residual_blocks)
netG_B2A = GeneratorResNet(input_shape, opt.n_residual_blocks)## 使用cudaif opt.cuda:
netG_A2B.cuda()
netG_B2A.cuda()## 载入训练模型参数
netG_A2B.load_state_dict(torch.load(opt.generator_A2B))
netG_B2A.load_state_dict(torch.load(opt.generator_B2A))## 设置为测试模式
netG_A2B.eval()
netG_B2A.eval()## 创建一个tensor数组
Tensor = torch.cuda.FloatTensor if opt.cuda else torch.Tensor
input_A = Tensor(opt.batchSize, opt.channels, opt.size, opt.size)
input_B = Tensor(opt.batchSize, opt.channels, opt.size, opt.size)'''构建测试数据集'''
transforms_ =[ transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))]
dataloader = DataLoader(ImageDataset(opt.dataroot, transforms_=transforms_, mode='test'),
batch_size=opt.batchSize, shuffle=False, num_workers=opt.n_cpu)################################### test开始 ###################################'''如果文件路径不存在, 则创建一个 (存放测试输出的图片)'''ifnot os.path.exists('output/A'):
os.makedirs('output/A')ifnot os.path.exists('output/B'):
os.makedirs('output/B')for i, batch inenumerate(dataloader):## 输入数据 real
real_A = Variable(input_A.copy_(batch['A']))
real_B = Variable(input_B.copy_(batch['B']))## 通过生成器生成的 fake
fake_B =0.5*(netG_A2B(real_A).data +1.0)
fake_A =0.5*(netG_B2A(real_B).data +1.0)## 保存图片
save_image(fake_A,'output/A/%04d.png'%(i+1))
save_image(fake_B,'output/B/%04d.png'%(i+1))print('processing (%04d)-th image...'%(i))print("测试完成")## 函数的起始if __name__ =='__main__':
train()## 训练# test() ## 测试
版权归原作者 进击的小老虎丶 所有, 如有侵权,请联系我们删除。