
GaussDB是华为自主创新研发的关系型数据库,基于华为在数据库领域20多年的战略投入,通过多维度的技术创新,在行业实践中构筑了高可用、高安全、高性能、高弹性、高智能的技术优势,在数据库替换场景中,具备易部署、易迁移的特性。作为国内当前唯一能够做到软硬协同、全栈自主的数据库,GaussDB已经在金融、政务、能源、交通等关键信息基础设施行业积累了丰富的实践经验,是企业数字化转型、核心数据上云、分布式改造的信赖之选。
从本期开始,Gauss松鼠会将陆续推出GaussDB技术解读系列文章,带您了解GaussDB的架构及关键技术原理。本篇将从GaussDB 关键架构目标、GaussDB分布式架构、数据计算路由层(Coordinator)关键技术方案等三方面对GaussDB架构进行介绍。
1 GaussDB 关键架构目标
GaussDB在架构设计上,采用组件化原则,分为GaussDB Kernel内核和GaussDB Kernel OM两部分。在产品形态上,提供面向云数据库服务GaussDB(for openGauss)的分布式安装包和集中式安装包,提供面向本地化安装的小型化安装包。
根据华为云提供的调查报告,当前全球数据库市场增长超预期,云是数据库增长最重要驱动力。得益于云数据库的迅猛发展,AWS市场份额超越IBM,成为数据库市场空间第三位,聚焦公有云、混合云构筑具备竞争力的可商用分布式数据库版本,数据库已成为公有云Top收入来源,同时通过数据库服务能够更大地提升公有云服务粘性。GaussDB Kernel面向云服务提供GaussDB产品,主要客户包含金融(银行、证券、保险)行业、政府(政务云、财政等)和大企业客户。结合产品可信要求定义及可信实施策略分析的内容,以及业界数据库厂商前沿动态,GaussDB Kernel在云服务场景中的架构目标按照一下几个维度来展开:
- 高性能:建立基于x86平台与鲲鹏平台的绝对性能领先,鲲鹏平台相对x86平台保证50%性能优势,达到单机170万tpmC,分布式全局强一致32节点1500万tpmC,承载用户关键业务负载;具备性能韧性能力,5倍压力下性能不抖动、十倍压力下系统不崩溃,同时具备抗过载逃生能力;具备大并发、低时延能力,单节点支持1万并发、单集群支持10万级并发访问请求,ms至秒级事务处理时延,支撑政企客户核心业务负载。
- 云原生:通过GTM-Lite技术轻量化处理全局读一致性点与写一致性点,集群扩展性达到256节点,未来通过全球时钟技术演进,在跨Region全局一致性下去除单点瓶颈;面向业务陡增等业务场景,构建基于哈希聚簇的存储结构和弹性扩容方案,实现秒级存储节点扩缩容和业务无感的计算节点弹性伸缩;构建分布式备机只读技术,只读性能提升100%以上。
- 高可用:AZ内主备高可用,1主多备,RPO=0、RTO<10s;同城跨AZ高可用,RPO=0、RTO<60s;跨Region容灾,RPO<10s、RTO<5min;提供备份恢复、PITR、闪回、ALT等企业级高可用特性;构建基于Paxos协议的多副本高可用和并行逻辑复制技术,实现RPO=0的同城双集群高可用容灾和基于流式复制的多地多中心容灾,保证机房级、区域级、城市级故障下的数据库高可用。
- 高安全:继承可信实施策略中安全可信需求,从安全,韧性,隐私等维度构筑安全可信能力,结合业界安全技术前沿发展,设计全密态数据库和防篡改数据库,保证用户敏感数据免于泄露和篡改;构建数据库安全自治管控方法,识别和拦截攻击者的异常行为;构建从接入、访问控制、加密到审计全方位纵深防御的安全防护体系。
- 高智能:面向云化场景故障运维诉求,基于AI技术,提供端到端自治运维管理能力,全面提升数据库产品服务可靠性和可用性;构筑自学习数据库内核,尤其是智能优化器,解决数据库内优化执行过程中计划不准、无法自适应等难题;结合业界前沿技术,构建库内AI引擎,基于SQL-like简易语法,提供数据库内置的机器学习训练和推理能力,为用户提供普惠AI;提供向量数据库能力,支撑盘古大模型、NAIE-NetGPT和GTS领域知识库等场景,提高大模型的预测效率。
GaussDB Kernel提供的本地化版本的架构目标包括:
- 高性能:支撑业务1千并发能力,性能达1000+ TPS;
- 高可用:提供多种部署形态的能力:一主一备、一主多备等;
- 高安全:支持数据库备份加密、网络连接安全管理及传输加密;支持三权分立,即数据库管理员、安全管理员、审计管理员权限职责分离;支持访问控制;
- 高智能:提供丰富高效的DFx运维监测手段,后续朝向基于AI的自治运维调优方向发展,降低BCM相关产品或解决方案的运维成本,提升易用性;
- 小型化:数据库安装包大小<25MB,且数据库刚启动后的底噪内存<250MB。
2 GaussDB分布式架构
2.1 GaussDB 分布式关键技术架构
- **Coordinator: ** 负责接收SQL请求,路由分发请求到对应的数据节点。同时维护系统元数据(路由分片信息,表定义)。
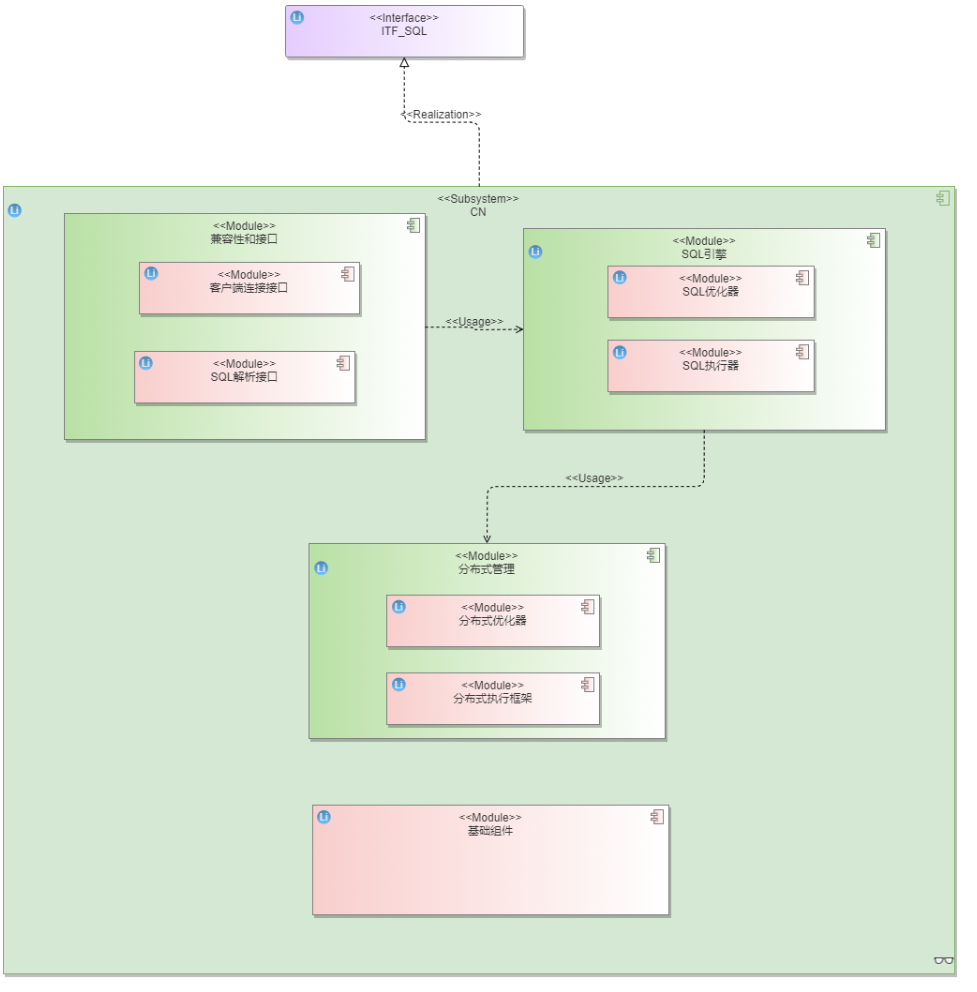
图1 Coordinator逻辑模型
- **Datanode: **数据节点存储分片数据。副本复制采用Quorum/Paxos协议。
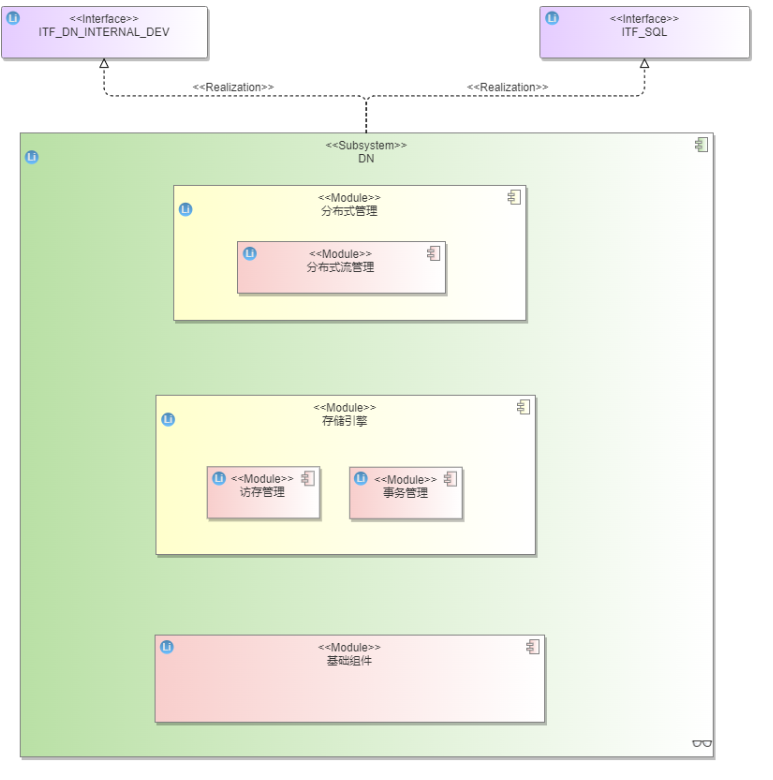
图2 DN逻辑模型
- **SECURITY: **安全子系统,主要包含了Kerberos认证,登录认证,安全审计,角色管理与访问控制,安全通信,透明数据加密,防篡改账本,全密态数据,数据脱敏等功能。

图3 安全逻辑模型
- **GTM: **全局事务管理器, 负责产生CSN号,提供全局统一快照。

图4 GTM逻辑模型
- **CM: ** 集群管理系统, 主要包括 CM Agent, CM Server和分布式配置中心。

图5 CM逻辑模型
- OM运维子系统,主要包括了安装,卸载,启动,停止数据库,备份恢复,升级,扩容数据库,打补丁,节点替换, 巡检功能,故障定位定界,参数管理,初始化工具及本地客户端工具。

图6 OM逻辑模型
- AI子系统,主要自治运维管理系统,如索引推荐、慢SQL诊断、分布键推荐;库内AI引擎;智能优化器,如智能基数估计和计划自适应选择。

图7 AI逻辑模型
- 驱动子系统,包括支持JDBC、ODBC、Python、GO等主流数据库驱动接口,适用于Java/C/C++/python/go 应用程序开发者。对于高级开发者而言,亦可采用libpq动态库接口和ecpg接口的方式,对数据库进行接入访问。

图8 驱动逻辑模型
关键模块2层逻辑模型:
存储引擎模块:

图9
SQL引擎:

图10
兼容性和接口模块:

图11
基础组件:

图12
分布式管理:
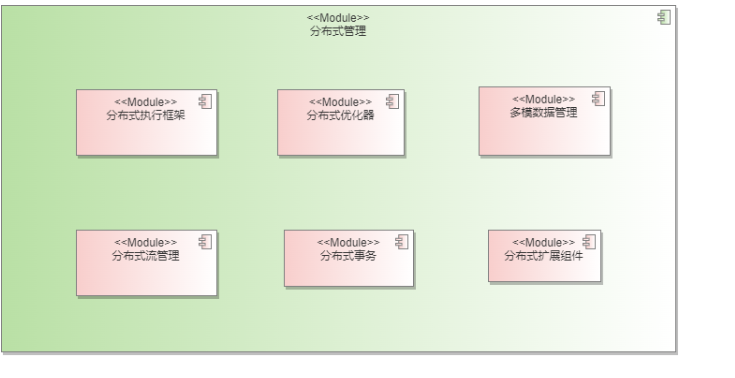
图13
3 数据计算路由层(Coordinator)关键技术方案
GaussDB Kernel V5版本的Catalog还是本地存储, 所以还需要考虑catalog的持久化问题.未来演进元数据解耦,Coordinator 无状态, 就不需要考虑Catalog持久化问题了。但是跨节点场景下的事务提交在Coordinator上还是要持久化的。

图14 Coordinator模块图
路由信息:每个表数据共分16384个hash bucket来存储,每个DN对应存储若干个hash bucket的数据。SQL优化器模块会根据Query的条件自动剪枝DN。
Pooler连接池:维护和每个DN连接的socket信息,缓存建立的连接。
3.1 分布式优化器
优化器的查询重写基础依赖于关系代数的等价变换。等价变换关系如下图所示:

图15 关系代数的等价变换
基于规则的查询重写,基本规则如下。
- 常量化简:如 SELECT * FROM t1 WHERE c1=1+1; 等价于SELECT * FROM t1 WHERE c1=2;
- 消除DISTINCT:CREATE TABLE t1(c1 INT PRIMARY KEY, c2 INT); SELECT DISTINCT(c1) FROM t1; SELECT c1 FROM t1;
- IN谓词展开:SELECT * FROM t1 WHERE c1 IN (10,20,30); 等价于SELECT * FROM t1 WHERE c1=10 or c1=20 OR c1=30;
- 视图展开:CREATE VIEW v1 AS (SELECT * FROM t1,t2 WHERE t1.c1=t2.c2); SELECT * FROM v1; 等价于 SELECT * FROM t1,t2 WHERE t1.c1=t2.c2;
- 条件下移:t1 join t2 on … and t1.b=5 等价于 (t1 where t1.b=5) join t2
- 条件传递闭包:a=b and a=3 -> b=3
- 消除子链接:如 select * from t1 where exists(select 1 from t2 where t1.a=t2.a); 等级于 select * from t1 (semi join) (select a from t2) t2 where t1.a=t2.a;
…
查询重写规则较多,在此不一一列举。
在基于代价的查询优化技术上,主要关注三个关键问题。分别是:结果集行数估算、执行代价估算以及路径搜索。其核心目标是,为多个物理执行的代价进行评分,最后选择出一个最优的计划,输出到执行器。
行数估算方面,通过analyze手段,收集基表的统计信息,统计信息包括:各个数据表的规模、行数以及页面数等。在表中,也会统计各个列的信息,包括distinct值(该列不相同的值的个数),空值的比例,MCV(most common value,用于记录数据倾斜情况)以及直方图(用于记录数据分布情况),根据基表统计信息,估算过滤、join的中间结果统计信息。未来将基于AI进行多维度统计信息收集,收集更准确的行数信息,以辅助更优的计划选择。
执行代价估算方面,根据数据量估算不同算子的执行代价,各个执行算子的代价之和即为执行计划的总代价。算子的代价,主要包含几个方面:CPU代价、IO代价、网络代价(分布式多分片场景)等。未来需要根据物理环境的不同,调整不同算子的执行代价比例,同时通过AI技术构建更精准的代价模型。
表1 代价估算算子种类
算子分类作用主要算子
表扫描算子
从存储层扫描数据
Seqscan, Indexscan
连接算子
进行两表连接
Hashjoin, MergeJoin, Nestloop
聚集算子
进行聚集操作
Hashagg, Groupagg
网络传输算子
网络上传输数据
Stream(redistribute, broadcast)
排序算子
进行排序算子
Sort
路径搜索方面,GaussDB Kernel V5采用自底向上的路径搜索算法,对于单表访问路径,一般有两种:
- 全表扫描:对表中的数据逐个访问。
- 索引扫描:借助索引来访问表中的数据,通常需要结合谓词一起使用。
优化器首先根据表的数据量、过滤条件、和可用的索引结合代价模型来估算各种不同扫描路径的代价。例如:给定表定义CREATE TABLE t1(c1 int); 如果表中数据为1,2,3…100000000连续的整型值并且在c1列上有B+树索引,那么对于SELECT * FROM t1 WHERE c1=1; 来说,只要读取1个索引页面和1个表页面就可以获取到数据。然而对于全表扫描,需要读取1亿条数据才能获取同样的结果。在这种情况下索引扫描的路径胜出。
索引扫描并不是在所有情况下都优于全表扫描,它们的优劣取决于过滤条件能够过滤掉多少数据,通常数据库管理系统会采用B+树来建立索引,如果在选择率比较高的情况下,B+树索引会带来大量的随机I/O,这会降低索引扫描算子的访问效率。比如SELECT * FROM t1 WHERE c1>0;这条语句,索引扫描需要访问索引中的全部数据和表中的全部数据,并且带来巨量的随机I/O,而全表扫描只需要顺序的访问表中的全部数据,因此在这种情况下,全表扫描的代价更低。
多表路径生成的难点主要在于如何枚举所有的表连接顺序(Join Reorder)和连接算法(Join Algorithm)。假设有两个表t1和t2做JOIN操作,根据关系代数中的交换律原则,可以枚举的连接顺序有t1 × t2和t2 × t1两种,JOIN的物理连接算子有Hash Join、Nested Loop Join、Merge Join三种类型。这样一来,可供选择的路径有6种之多。这个数量随着表的增多会呈指数级增长,因此高效的搜索算法显得至关重要。GaussDB Kernel 通常采用自底向上的路径搜索方法,首先生成了每个表的扫描路径,这些扫描路径在执行计划的最底层(第一层),在第二层开始考虑两表连接的最优路径,即枚举计算出每两表连接的可能性,在第三层考虑三表连接的最优路径,即枚举计算出三表连接的可能性,直到最顶层为止生成全局最优的执行计划。假设有4个表做JOIN操作,它们的连接路径生成过程如下:
- 单表最优路径:依次生成{1},{2},{3},{4}单表的最优路径。
- 二表最优路径:依次生成{1 2},{1 3},{1 4},{2 3},{2 4},{3 4}的最优路径。
- 三表最优路径:依次生成{1 2 3},{1 2 4},{2 3 4},{1 3 4}的最优路径。
- 四表最优路径:生成{1 2 3 4}的最优路径即为最终路径。
多表路径问题核心为Join Order,这是NP(Nondeterministic Polynomially,非确定性多项式)类问题,在多个关系连接中找出最优路径,比较常用的算法是基于代价的动态规划算法,随着关联表个数的增多,会发生表搜索空间膨胀的问题,进而影响优化器路径选择的效率,可以采用基于代价的遗传算法等随机搜索算法来解决。
另外为了防止搜索空间过大,可以采用下列三种剪枝策略:
- 尽可能先考虑有连接条件的路径,尽量推迟笛卡尔积。
- 在搜索的过程中基于代价估算对执行路径采用LowBound剪枝,放弃一些代价较高的执行路径。
- 保留具有特殊物理属性的执行路径,例如有些执行路径的结果具有有序性的特点,这些执行路径可能在后序的优化过程中避免再次排序。
分布式执行计划生成方面,相关关键技术流程如图所示:
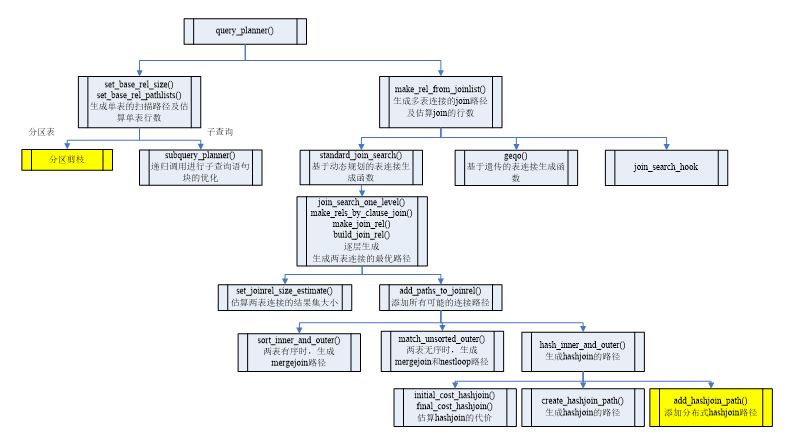
图16 分布式执行计划生成
3.2 分布式执行框架
GaussDB Kernel V5 执行框架位于SQL优化器与存储引擎之间,负责根据优化器输出的执行计划,执行数据存取以及相关的计算操作,将相关结果返回到客户端。其目标是,更好地利用各个节点的计算资源,更快地完成执行任务,并返回结果。
- 单节点执行引擎:GaussDB Kernel V5 支持行存表的行执行引擎,以及列存表向量化执行引擎,提供Adaptor算子(RowAdapter,VectorAdapter)支持行列存储的自适应切换。对于行执行引擎来说,经过逐层的算子处理,一次处理一个元组,直到再无元组为止,详细过程不在此处赘述。对于列执行引擎来说,一次处理一个batch,尽量读取更多的数据,减少IO的次数,提供高CPU的利用效率,流水线执行过程中,调用次数尽量少。

图17 行列存执行引擎自动切换
- 执行引擎主要算子:执行引擎提供算子种类如下。

图18 执行引擎主要算子
执行算子主要功能详细列表如下。
扫描算子(Scan Plan Node):扫描节点负责从底层数据来源抽取数据,数据来源可能是来自文件系统,也可能来自网络(分布式查询)。一般而言扫描节点都位于执行树的叶子节点,作为执行数的数据输入来源,典型代表SeqScan、IndexScan、SubQueryScan。
表2 扫描算子
算子类型含义
Seqscan
顺序扫描行存储引擎
CstoreScan
扫描列存储引擎
DfsScan
顺序扫描HDFS存储引擎
Stream
扫描网络算子(分布式数据库特有)
BitmapHeapScan
BitmapIndexScan
利用bitmap获取元组
TidScan
通过Tid获取元组
SubQueryScan
子查询扫描
ValueScan
扫描Value列表
CteScan
扫描CommTableExpr
WorkTableScan
扫描中间结果集
FunctionScan
函数扫描
IndexScan
索引扫描
IndexOnlyScan
直接从索引返回元组
ForgeinScan
外部表扫描
StreamScan
网络数据扫描
控制算子(Control Plan Node):控制算子一般不映射代数运算符,是为了执行器完成一些特殊的流程引入的算子,例如Limit、RecursiveUnion、Union
表3 控制算子
算子类型含义
Result
顺序扫描行存储引擎
ModifyTable
INSERT/UPDATE/DELETE操作的算子
Append
多个关系集合的追加操作
MergeAppend
多个有序关系集合的追加操作
BitmapAnd
顺序扫描HDFS存储引擎
BitmapOr
扫描网络算子(分布式数据库特有)
RecursiveUnion
利用bitmap获取元组
物化算子(Materialize Plan Node):物化算子一般指算法要求,在做算子逻辑处理的时候,要求把下层的数据进行缓存处理,因为对于下层算子返回的数据量不可提前预知,因此需要在算法上考虑数据无法全部放置到内存的情况,例如Agg、Sort
表4 物化算子
算子类型含义
Materialize
物化
Sort
对下层数据进行排序
Group
对下层已经排序的数据进行分组
Agg
对下层数据进行分组(无序)
Unique
对下层数据进行去重操作
Hash
对下层数据进行缓存,存储到一个hash表里
SetOp
对下层数据进行缓存,用于处理intersect等集合操作
WindowAgg
窗口函数
Limit
处理limit子句
连接算子(Join Plan Node):这类算子是为了应对数据库中最常见的关联操作,Join表关联。
表5 连接算子
算子类型含义
Nestloop
对下层两股数据流实现循环嵌套连接操作
MergeJoin
对下层两股排序数据流实现归并连接操作
HashJoin
对下层两股数据流实现哈希连接操作
- 线程池模型
每个组件 CN, DN, GTM, CMS 都是独立进程模型, 每个进程内部采用线程池模型。

图19 线程池模型
- ThreadPoolControler:线程池总控,负责线程池的初始化和资源管理
- ThreadSessionControler :会话生命周期管理
- ThreadPoolGroup:线程组,可以定义灵活的线程数量和帮核策略
- ThreadPoolListener: 监听线程,负责事件的分发和管理
- ThreadPoolWorker: 工作线程
设计关键要点:
- 线程池根据CPU的core分成多个thread group
- 每个thread group里有一个listen thread和多个worker thread
- listern thread负责监听一批活动连接,同时分配任务给worker thread
- worker thread以事务维度接受任务派发来执行
本篇中,GaussDB架构从GaussDB 关键架构目标、GaussDB分布式架构、数据计算路由层(Coordinator)关键技术方案等三方面展开了介绍,下篇文章将从数据持久化存取层(DataNode)关键技术方案、全局事务管理层(GTM)关键技术方案、集群管理层(CM)关键技术方案等方面介绍GaussDB架构,敬请期待!
欢迎小伙伴们交流~
版权归原作者 Gauss松鼠会 所有, 如有侵权,请联系我们删除。