
我是ubuntu20.4的版本因此我的ros需要安装noetic版本
**sudo apt-get update **//更新软件源
**wget http://fishros.com/install -O fishros && . fishros **//ros安装代码
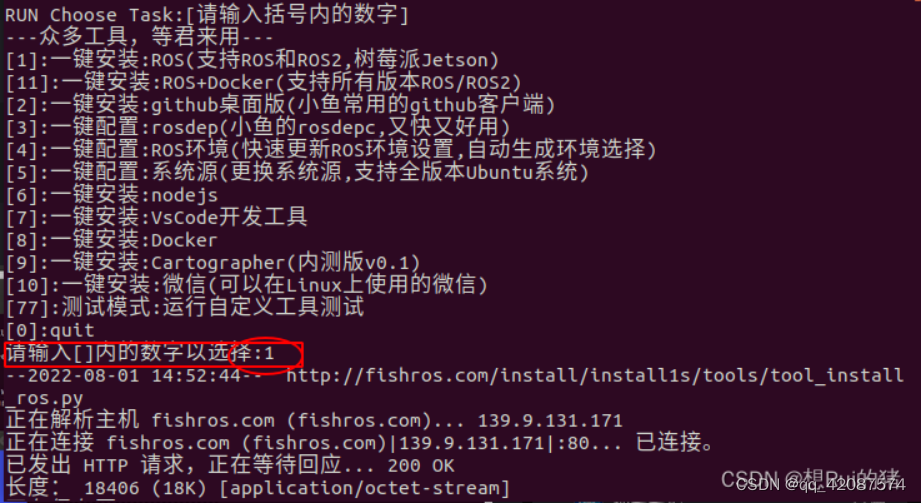
×建议选1
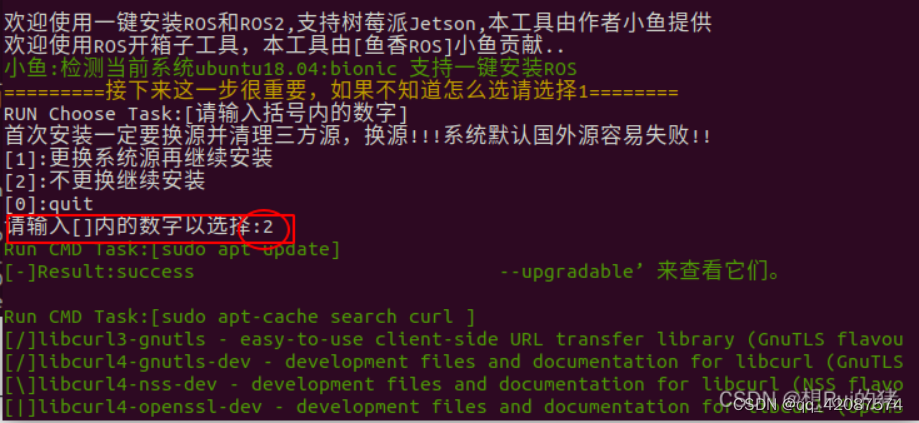
×建议选2
选择安装的具体版本:
ubuntu版本 Ros版本
Ubuntu14.04 Ingigo
Ubuntu16.04 Kinetic
Ubuntu18.04 Melodic
Ubuntu20.04 Noetic
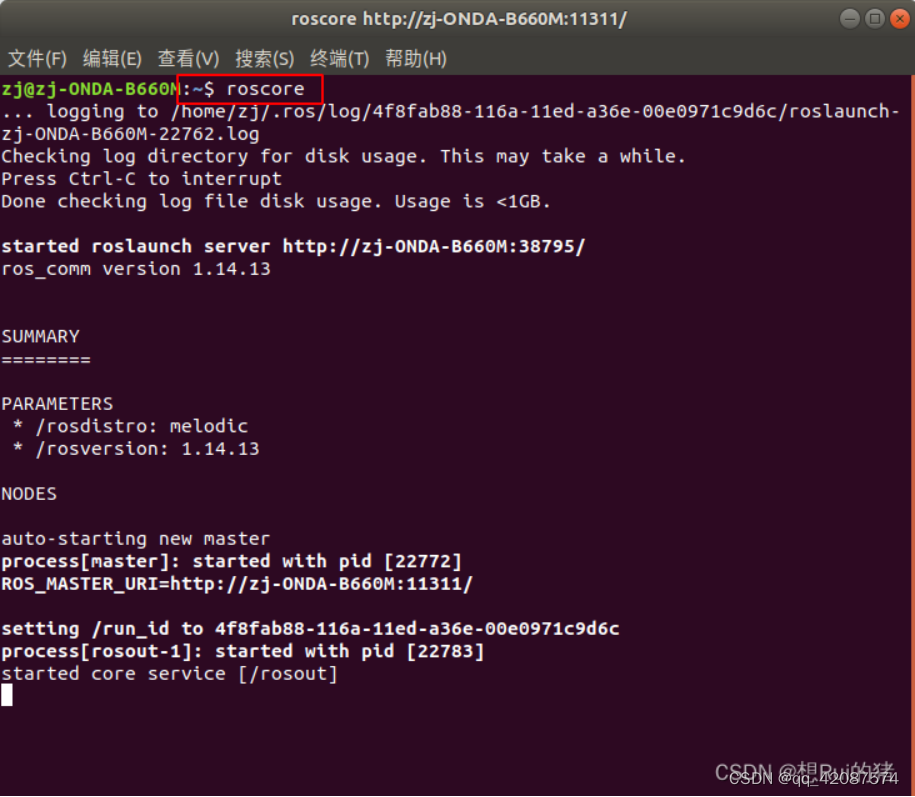
安装完成

roscore测试下
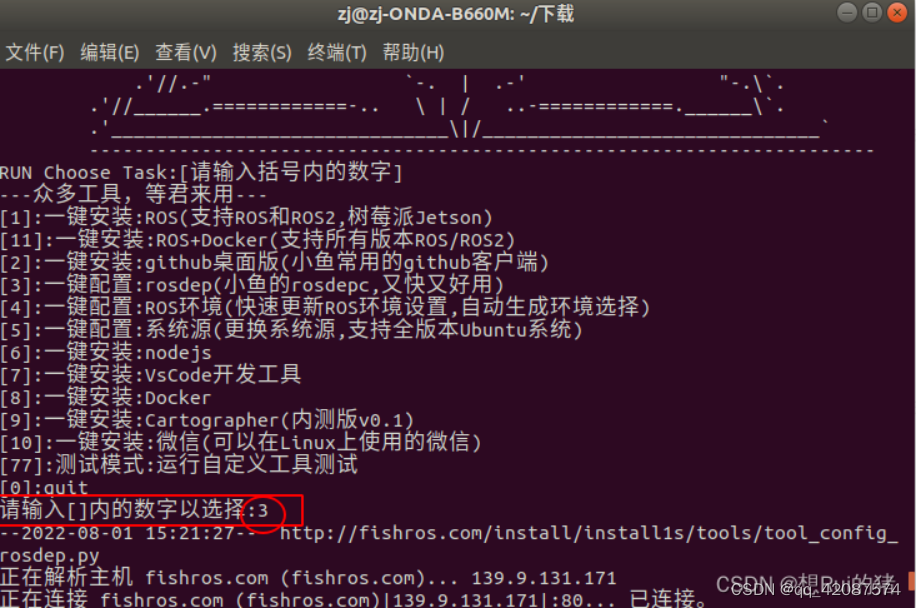
安装完后还需要初始化下rosdep
按下键盘的上健,然后enter,选择3
rosdepc update
到这里ros 安装完毕
最后是小海龟测试(分别在三个终端里输入一下语句,单击最后一个窗口一下,使用上下左右建操纵小海龟)
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
最后在测试下rviz
终端输入
**rosrun rviz rviz **
可能出现的错误如下:
本文转载自: https://blog.csdn.net/qq_42087574/article/details/129553722
版权归原作者 牙刷与鞋垫 所有, 如有侵权,请联系我们删除。
版权归原作者 牙刷与鞋垫 所有, 如有侵权,请联系我们删除。