
系列文章目录
目标跟踪——SORT算法原理浅析
目标跟踪——Deep Sort算法原理浅析
基于yolov5与Deep Sort的流量统计与轨迹跟踪
文章目录
前言
先来看下实现效果:
上图展示了用yolov5作为检测器,Deep Sort为追踪器实现了对车流量的统计并绘制了每辆车的运行轨迹。
一、整体目录结构
下图展示了项目的整体目录结构: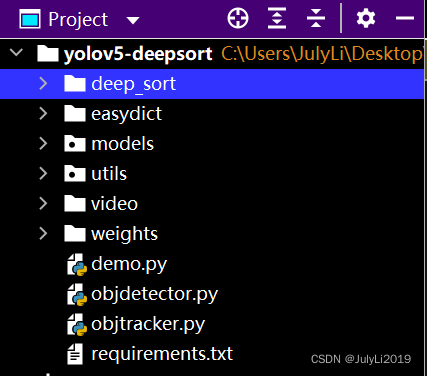
其中:
deep_sort
文件下为目标跟踪相关代码;
weights
文件夹下存放yolov5检测模型;
demo.py
针对读取的视频进行目标追踪
objdetector.py
封装的一个目标检测器,对视频中的物体进行检测
objtracker.py
封装了一个目标追踪器,对检测的物体进行追踪
二、Deep Sort代码参数解释
deep_sort/configs/deep_sort.yaml
文件里保存了Deep Sort算法的配置参数: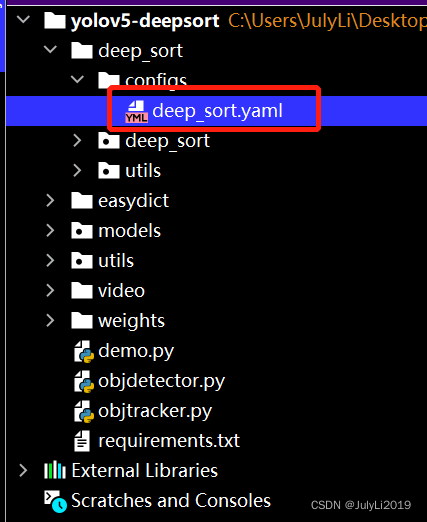
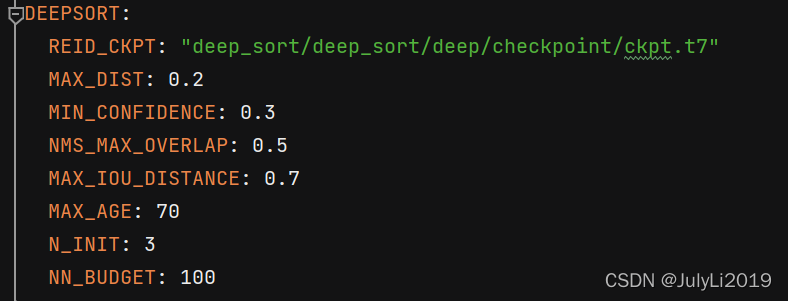
这些参数依次的含义为:
REID_CKPT:特征提取权重的目录路径MAX_DIST:最大余弦距离,用于级联匹配,如果大于该阈值,则忽略MIN_CONFIDENCE:检测结果置信度阈值NMS_MAX_OVERLAP:非极大抑制阈值,设置为1代表不进行抑制MAX_IOU_DISTANCE:最大IOU阈值MAX_AGE:最大寿命,也就是经过MAX_AGE帧没有追踪到该物体,就将该轨迹变为删除态N_INIT:最高击中次数,如果击中该次数,就由不确定态转为确定态NN_BUDGET:最大保存特征帧数,如果超过该帧数,将进行滚动保存
三、代码展示
下面给出
demo.py
的代码:
import numpy as np
import objtracker
from objdetector import Detector
import cv2
VIDEO_PATH ='./video/test_traffic.mp4'if __name__ =='__main__':# 根据视频尺寸,填充供撞线计算使用的polygon
width =1920
height =1080
mask_image_temp = np.zeros((height, width), dtype=np.uint8)# 用于记录轨迹信息
pts ={}# 填充第一个撞线polygon(蓝色)
list_pts_blue =[[204,305],[227,431],[605,522],[1101,464],[1900,601],[1902,495],[1125,379],[604,437],[299,375],[267,289]]
ndarray_pts_blue = np.array(list_pts_blue, np.int32)
polygon_blue_value_1 = cv2.fillPoly(mask_image_temp,[ndarray_pts_blue], color=1)
polygon_blue_value_1 = polygon_blue_value_1[:,:, np.newaxis]# 填充第二个撞线polygon(黄色)
mask_image_temp = np.zeros((height, width), dtype=np.uint8)
list_pts_yellow =[[181,305],[207,442],[603,544],[1107,485],[1898,625],[1893,701],[1101,568],[594,637],[118,483],[109,303]]
ndarray_pts_yellow = np.array(list_pts_yellow, np.int32)
polygon_yellow_value_2 = cv2.fillPoly(mask_image_temp,[ndarray_pts_yellow], color=2)
polygon_yellow_value_2 = polygon_yellow_value_2[:,:, np.newaxis]# 撞线检测用的mask,包含2个polygon,(值范围 0、1、2),供撞线计算使用
polygon_mask_blue_and_yellow = polygon_blue_value_1 + polygon_yellow_value_2
# 缩小尺寸,1920x1080->960x540
polygon_mask_blue_and_yellow = cv2.resize(polygon_mask_blue_and_yellow,(width //2, height //2))# 蓝 色盘 b,g,r
blue_color_plate =[255,0,0]# 蓝 polygon图片
blue_image = np.array(polygon_blue_value_1 * blue_color_plate, np.uint8)# 黄 色盘
yellow_color_plate =[0,255,255]# 黄 polygon图片
yellow_image = np.array(polygon_yellow_value_2 * yellow_color_plate, np.uint8)# 彩色图片(值范围 0-255)
color_polygons_image = blue_image + yellow_image
# 缩小尺寸,1920x1080->960x540
color_polygons_image = cv2.resize(color_polygons_image,(width //2, height //2))# list 与蓝色polygon重叠
list_overlapping_blue_polygon =[]# list 与黄色polygon重叠
list_overlapping_yellow_polygon =[]# 下行数量
down_count =0# 上行数量
up_count =0
font_draw_number = cv2.FONT_HERSHEY_SIMPLEX
draw_text_postion =(int((width /2)*0.01),int((height /2)*0.05))# 实例化yolov5检测器
detector = Detector()# 打开视频
capture = cv2.VideoCapture(VIDEO_PATH)whileTrue:# 读取每帧图片
_, im = capture.read()if im isNone:break# 缩小尺寸,1920x1080->960x540
im = cv2.resize(im,(width //2, height //2))
list_bboxs =[]# 更新跟踪器
output_image_frame, list_bboxs = objtracker.update(detector, im)# 输出图片
output_image_frame = cv2.add(output_image_frame, color_polygons_image)iflen(list_bboxs)>0:# ----------------------判断撞线----------------------for item_bbox in list_bboxs:
x1, y1, x2, y2, _, track_id = item_bbox
# 撞线检测点,(x1,y1),y方向偏移比例 0.0~1.0
y1_offset =int(y1 +((y2 - y1)*0.5))
x1_offset =int(x1 +((x2 - x1)*0.5))# 撞线的点
y = y1_offset
x = x1_offset
# 然后每检测出一个预测框,就将中心点加入队列
center =(x, y)if track_id in pts:
pts[track_id].append(center)else:
pts[track_id]=[]
pts[track_id].append(center)
thickness =2
cv2.circle(output_image_frame,(center),1,[255,255,255], thickness)for j inrange(1,len(pts[track_id])):if pts[track_id][j -1]isNoneor pts[track_id][j]isNone:continue
cv2.line(output_image_frame,(pts[track_id][j -1]),(pts[track_id][j]),[255,255,255], thickness)if polygon_mask_blue_and_yellow[y, x]==1:# 如果撞 蓝polygonif track_id notin list_overlapping_blue_polygon:
list_overlapping_blue_polygon.append(track_id)# 判断 黄polygon list里是否有此 track_id# 有此track_id,则认为是 UP (上行)方向if track_id in list_overlapping_yellow_polygon:# 上行+1
up_count +=1print('up count:', up_count,', up id:', list_overlapping_yellow_polygon)# 删除 黄polygon list 中的此id
list_overlapping_yellow_polygon.remove(track_id)elif polygon_mask_blue_and_yellow[y, x]==2:# 如果撞 黄polygonif track_id notin list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.append(track_id)# 判断 蓝polygon list 里是否有此 track_id# 有此 track_id,则 认为是 DOWN(下行)方向if track_id in list_overlapping_blue_polygon:# 下行+1
down_count +=1print('down count:', down_count,', down id:', list_overlapping_blue_polygon)# 删除 蓝polygon list 中的此id
list_overlapping_blue_polygon.remove(track_id)# ----------------------清除无用id----------------------
list_overlapping_all = list_overlapping_yellow_polygon + list_overlapping_blue_polygon
for id1 in list_overlapping_all:
is_found =Falsefor _, _, _, _, _, bbox_id in list_bboxs:if bbox_id == id1:
is_found =Trueifnot is_found:# 如果没找到,删除idif id1 in list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.remove(id1)if id1 in list_overlapping_blue_polygon:
list_overlapping_blue_polygon.remove(id1)
list_overlapping_all.clear()# 清空list
list_bboxs.clear()else:# 如果图像中没有任何的bbox,则清空list
list_overlapping_blue_polygon.clear()
list_overlapping_yellow_polygon.clear()# 输出计数信息
text_draw ='DOWN: '+str(down_count)+ \
' , UP: '+str(up_count)
output_image_frame = cv2.putText(img=output_image_frame, text=text_draw,
org=draw_text_postion,
fontFace=font_draw_number,
fontScale=0.75, color=(0,0,255), thickness=2)
cv2.imshow('Counting Demo', output_image_frame)
cv2.waitKey(1)
capture.release()
cv2.destroyAllWindows()
若需要更改模型,只需要更改
objdetector.py
下面的给出的部分:
OBJ_LIST =['person','car','bus','truck']
DETECTOR_PATH ='weights/yolov5m.pt'
总结
本篇文章给出了基于yolov5与Deep Sort的流量统计与轨迹跟踪的实例,在项目中有着实际的应用场景。
下面给出源码地址,欢迎
star
:
https://github.com/JulyLi2019/yolov5-deepsort/releases/tag/V1.0,yolov5-deepsort.zip文件
如果阅读本文对你有用,欢迎一键三连呀!!!
2022年4月15日09:59:53
本文转载自: https://blog.csdn.net/JulyLi2019/article/details/124047020
版权归原作者 JulyLi2019 所有, 如有侵权,请联系我们删除。
版权归原作者 JulyLi2019 所有, 如有侵权,请联系我们删除。