
项目场景:
在训练或者微调模型的过程中,单节点的显存溢出,或者单节点的显卡较少,算力有限。需要跨节点用多个节点多块显卡来运行这项任务。这里就需要使用分布式命令,将这项任务分布到多个节点上来处理。
问题描述
在此我仅记录我在运行分布式过程中遇到的一些问题。
首先,对于pytorch深度学习框架的分布式进程是有一套标准的流程的,简单来讲就是先通过dist进行初始化,再将模型进行分布式分配。具体所用的API为:
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
对于预训练(或者微调)的脚本,我参考了官方文档中的测试代码,测试代码实际非常简单,搭建了一个非常小的网络,同时对其使用分布式进程,非常适合拿来做测试。链接为:官方文档
dist.init_process_group()是PyTorch中用于初始化分布式训练的函数之一。它用于设置并行训练环境,连接多个进程以进行数据和模型的分布式处理。我们通过init_process_group()函数这个方法来进行初始化,其参数包括以下内容
- backend(必需参数):指定分布式后端的类型,可以是以下选项之一:‘tcp’:使用TCP协议进行通信。 ‘gloo’:使用Gloo库进行通信。 ‘mpi’:使用MPI(Message Passing Interface)进行通信。 ‘nccl’:使用NCCL库进行通信(适用于多GPU的分布式训练)。 ‘hccl’:使用HCCL库进行通信(适用于华为昇腾AI处理器的分布式训练)。
- init_method(可选参数):指定用于初始化分布式环境的方法。它可以是以下选项之一: ‘env://’:使用环境变量中指定的方法进行初始化。 ‘file:// ’:使用本地文件进行初始化。 ‘tcp:// :’:使用TCP地址和端口进行初始化。 ‘gloo://:’:使用Gloo地址和端口进行初始化。 ‘mpi://:’:使用MPI地址和端口进行初始化。
- rank(可选参数):指定当前进程的排名(从0开始)。
- world_size(可选参数):指定总共使用的进程数。
- timeout(可选参数):指定初始化的超时时间。
- group_name(可选参数):指定用于连接的进程组名称。
这里由于服务器采用的slurm系统,我们开始计划使用mpi去实现分布式分发,同时torch的初始化也支持mpi,原始想法是通过mpirun来进行分布式计算。但是,如果要使用mpi来实现分布式功能,必须要通过github上的源代码进行编译,通过conda和pip进行下载的pytorch自身是不携带mpi的
通过上面的参数,可以看到backend是有多重通信方式的,常用的有gloo和mpi和nccl,但是这三者是有区别的,这里我们可以参考官方文档:官方文档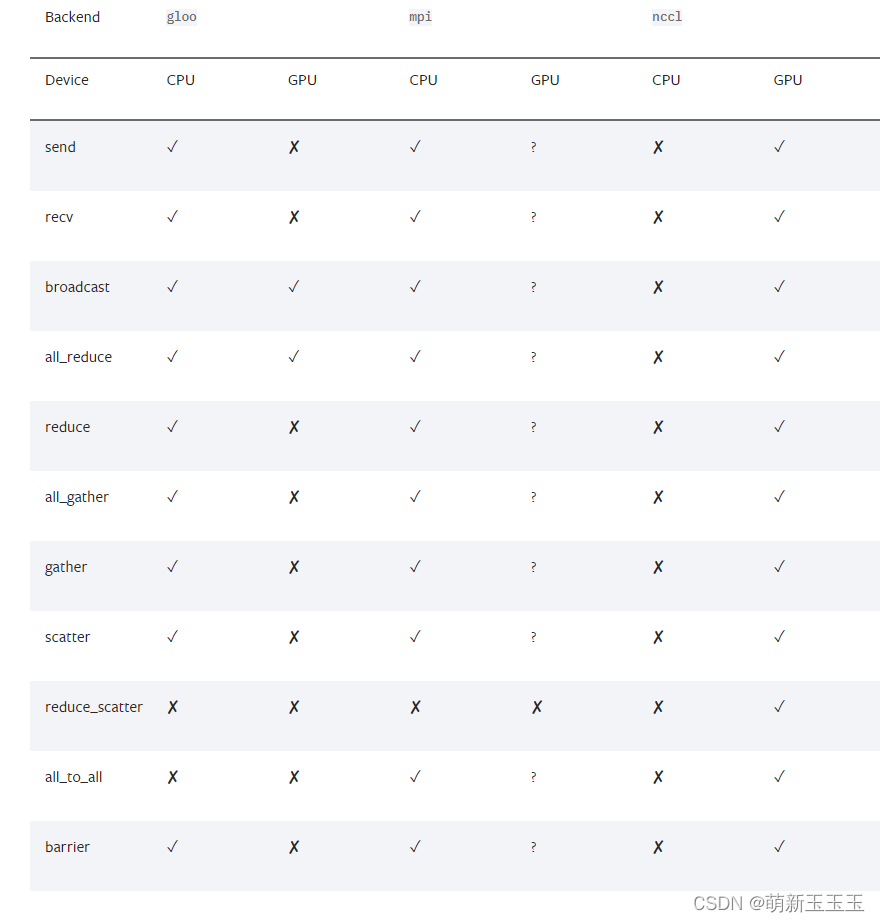
这里我们直接放出结论,以供参考:
- 对于分布式 GPU 训练,使用 NCCL 后端。
- 对于分布式 CPU 训练,使用 Gloo 后端。
- 如果你的主机是 GPU 主机并且具有 InfiniBand 互连: 使用 NCCL,因为它是目前唯一支持 InfiniBand 和 GPUDirect 的后端。
- 如果你的主机是 GPU 主机并且具有以太网互连: 使用 NCCL,因为它目前提供了最好的分布式 GPU 训练性能,特别是对于多进程单节点或多节点分布式训练。
- 如果你遇到 NCCL 的任何问题,使用 Gloo 作为备选选项。(注意,Gloo 目前运行速度比 NCCL 慢)
- 如果你的主机是 CPU 主机并且具有 InfiniBand 互连: 如果你的 InfiniBand 启用了 IP over IB,使用 Gloo,否则,使用 MPI。我们计划在即将发布的版本中为 Gloo 添加 InfiniBand 支持。
- 如果你的主机是 CPU 主机并且具有以太网互连: 使用 Gloo,除非你有特定的理由使用 MPI。
我们可以根据文档的提示,得出,MPI是最不推荐使用的一种方法,对于英伟达的显卡,最优先的还是使用NCCL方法。和Mpi相匹配的有一种torch官方自带的方法,在torch2.0之前使用的API叫:torch.distributed.launch在使用时显示未来的版本将会弃用这个API,取而代之的是torchrun。因此我们将命令由mpi改为torchrun方法,在dist初始化使用nccl后端通信。
这里我们可以参考torchrun的官方运行方法:官方文档
经过近两周的调试与踩坑,先是在测试节点上对官方测试脚本进行分布式测试,运行成功后再将相同的环境和文件迁移到计算节点上,再在计算节点上对分布式命令进行测试,期间还测试了root用户和子用户对torchrun命令是否会有影响。
假设我们有三个节点,node02,node03,node04,每个节点上有四张GPU。现在我们将官方测试文档中的代码写为test_mpi.py。最终通过torchrun实现的命令如下:
torchrun --nproc_per_node=4 --nnodes=3 --node_rank=0 --master_addr=192.168.0.101 --master_port=29500 test_mpi.py
我们没有必要和torchrun的官方文档一样去设置–rdzv-backend 和–rdzv-id,因为这不是必须的,用默认的即可。我们只需要设置的参数只有上面这几个。具体参数介绍如下:
–nproc_per_node=4:指定每个节点(机器)上的进程数,这里是4个。意味着每个机器将启动4个进程来参与分布式训练。
- –nnodes=3:指定总共的节点数,这里是3个。意味着总共有3个机器参与分布式训练。
- –node_rank=0:指定当前节点(机器)的排名,这里是0。排名从0开始,用于在分布式环境中区分不同的节点。
- –master_addr=192.168.0.101:指定主节点的IP地址,这里是192.168.0.101。主节点用于协调分布式训练过程。
- –master_port=29500:指定主节点的端口号,这里是29500。主节点使用指定的端口来与其他节点进行通信。
通过设置这些参数,该命令将在3个节点的分布式环境中启动4个进程,并指定192.168.0.101作为主节点进行协调和通信。
这里的主节点地址我随便写的,可以根据实际情况进行修改。主节点的地址的- --node_rank必须设置为0,也就是上述这行命令,必须要先在主节点上线运行。
举个例子,假如我的主节点是node02,那么我就要先在node02节点的终端上运行上述torchrun命令,同时–master_addr要为node02的ip地址(查看IP地址可以通过:ip addr),然后node03,node04的顺序就不重要了,在其节点的终端上将–node_rank=0改为–node_rank=1和–node_rank=2运行即可。
这里出现第一个问题,即是,通讯超时(具体表现为:**ERROR:torch.distributed.elastic.multiprocessing.api:failed (exitcode: -11)**)。假如我们的节点之前ping方法没有问题,同时节点并没有处于被占用的情况,那么分析超时就比较困难了。我会在之后的解决方法中,提供我是如何解决的。
在命令确认无误之后,我们需要将这个命令,写成脚本提交到后台,挂在服务器上运行,而不是在终端上一直在线处理。
由于我们服务器使用的slurm系统,slurm系统自带一套可以提交作业的方法。于是就要将这个命令进行sbatch脚本打包。打包的bash脚本如下所示:
#!/bin/bash#SBATCH --job-name=pytorch_job # 创建一个任务名#SBATCH -N 3 # 需要使用的节点数#SBATCH --ntasks-per-node=4 # 每个节点上的任务数#SBATCH --output=job_output.out # 标准输出文件#SBATCH --error=job_error.err # 标准错误文件#SBATCH --nodelist=node02,node03,node04 # 指定节点列表# 加载任何必要的模块,例如:# module load python# module load pytorch# source ……exportTORCH_DISTRIBUTED_DEBUG=INFO
exportNCCL_IB_DISABLE=1# 设置主节点# 节点列表NODELIST=$(scontrol show hostname $SLURM_JOB_NODELIST)# 对第一个节点赋值为主节点MASTER_NODE=$(head -n 1<<<"$NODELIST")# 计数器NODE_COUNT=0# 一共的节点数NODE_NUM=($(echo $NODELIST |tr" ""\n"|wc -l))# 打印echo$SLURM_NODEIDecho$NODELISTecho$MASTER_NODEecho$NODE_NUMforNODEin$NODELIST;doif["$NODE"=="$MASTER_NODE"];then
srun --nodes=1 --ntasks=1 -w $NODE torchrun --nproc_per_node=4 --nnodes=$NODE_NUM --node_rank=0 --master_addr=192.168.0.101 --master_port=29500 test_mpi.py &else((NODE_COUNT++))
srun --nodes=1 --ntasks=1 -w $NODE torchrun --nproc_per_node=4 --nnodes=$NODE_NUM --node_rank=$NODE_COUNT --master_addr=192.168.0.101 --master_port=29500 test_mpi.py &fidonewait
脚本的逻辑为:通过srun在启动的每个节点上运行torchrun命令,运行的同时还需要进行判断,判断提交的节点是不是主节点,如果是主节点则node_rank的值要为0,如果不是主节点则node_rank的值为1,2……其实并不推荐使用sbatch嵌套srun()
这里出现第二个问题,假如不是不是在主节点第一个运行命令,则会发生超时,具体情况如下:
我会在之后的解决方法中,提供我是如何解决的。
原因分析:
对于上述的两种超时问题,首先要做的是在节点之间进行ping操作确认,确认不是服务器本身的问题,则考虑是不是节点之间的通信问题。因为NCCL也是有内部通信的,NVIDIA的NCCL库支持多种传输方式,以便在不同的硬件和网络配置中实现最优的通信性能。以下是一些主要的传输方式:
InfiniBand (IB):如前所述,InfiniBand是一种高性能、低延迟的网络传输技术,常用于高性能计算(HPC)和数据中心。
TCP/IP:这是最常见的网络通信协议,可以在任何支持TCP/IP的网络(包括常见的以太网)上运行。
Shared Memory (SHM):在同一台机器上的GPU之间,NCCL可以使用共享内存进行通信。这通常比通过网络传输更快。
CUDA Inter-Process Communication (IPC):对于同一节点上的多个GPU,NCCL可以使用CUDA IPC进行通信。这是一种允许不同CUDA进程共享GPU内存的机制,可以提高通信效率。
NVLink:NVLink是NVIDIA的一种高速互连技术,用于连接GPU和GPU,或GPU和CPU。它提供了比传统PCIe更高的带宽,适用于需要高速GPU间通信的应用。
这些传输方式可以根据具体的硬件配置和通信需求进行选择和配置。
解决方案:
我们可以在之前的脚本中,添加环境变量,进入调试模型,查看具体的原因:
exportNCCL_DEBUG=INFO
exportNCCL_DEBUG_SUBSYS=ALL
exportTORCH_DISTRIBUTED_DEBUG=INFO
对于第一个问题,再次运行我们的命令,即可获得NCCL的INFO信息,我们详细对比信息可以发现,在主节点上,我们使用的通信方式是NET/IB,如下图所示:
而在其他节点,我们使用的方式是 NET/Socket
NET/IB 和 NET/Socket 是两种不同的网络通信接口。NET/IB 通常指的是 InfiniBand,这是一种高性能、低延迟的网络通信接口,常用于高性能计算和数据中心。而 NET/Socket 则是一种更常见的网络接口,它在各种网络环境中都可以使用。如果你的两个节点一个使用 NET/IB,另一个使用 NET/Socket,那么这两个节点之间的通信可能会受到影响。因为 NCCL 默认使用最快的可用传输方法,如果两个节点的网络接口不同,那么可能无法建立有效的通信。具体情况可能需要根据你的网络环境和配置进行测试。这里建议使用同一种通信方式。
我们将IB禁用即可:
exportNCCL_IB_DISABLE=1
对于第二个问题,我们只需要写判断语句,确保主节点运行node_rank=0的命令即可,在上述给出的代码我已经写好了判断语句。
版权归原作者 萌新玉玉玉 所有, 如有侵权,请联系我们删除。