
在中医针灸的传统治疗中,穴位取穴的精确度对于治疗效果至关重要。然而,传统的定位方法,如体表标志法、骨度折量法和指寸法,由于观察角度、个体差异(如人体姿态和皮肤纹理)以及环境因素的干扰,往往难以达到高度的精确性和稳定性。随着深度学习技术,特别是卷积神经网络(CNN)的迅猛发展,其在人体关键点检测领域的突破性进展为解决穴位定位难题提供了新的思路。CNN凭借其独特的结构优势,在应对复杂的视觉识别任务时表现出色,已在包括医学影像分析在内的多个领域取得了卓越成就。

本研究致力于将多任务CNN应用于中医穴位定位,特别是针对腹部这一经络穴位密集的区域。通过整合世界卫生组织(WHO)的针灸标准和古典医籍的知识,本研究旨在开发一个能够克服传统方法局限性的智能化腹部穴位定位系统。该系统旨在复杂条件下保持高精度的穴位识别能力。通过跨学科融合,将深度学习技术与传统针灸学相结合,本研究旨在探索一种高效、准确的腹部穴位定位新方法。
一、穴位定位与深度学习技术的融合探索
针灸作为传统中医的重要治疗手段之一,其疗效很大程度上依赖于穴位定位的准确性。特别是在腹部穴位定位方面,由于腹部集中了大量与内脏功能密切相关的穴位,因此提高其定位精度尤为重要。在此背景下,应用CNNs技术来提升腹部穴位定位的精确性和稳定性成为可能。具体而言,CNNs技术在腹部穴位定位中的优势包括但不限于:
尺度不变性:CNNs,特别是像HigherHRNet这样具备尺度感知能力的网络,可以处理不同尺度下的关键点检测问题,从而适应不同体型的患者;
局部特征提取:通过局部感受野捕捉图像中的局部特征,这对于识别腹部穴位周围的解剖标志和皮肤纹理等细节信息非常重要;
层次化特征表达:网络的层次化结构允许从低级到高级逐步抽象特征,有助于从复杂的腹部解剖结构中精确定位穴位;
鲁棒性:CNNs在处理噪声和环境变化方面表现出较好的鲁棒性,能够在不同光照条件或患者姿势变化的情况下保持高精度;
自动化与快速响应:预训练的CNNs模型可实现快速且自动化的穴位定位,提高临床应用效率;
数据驱动优化:随着数据积累和模型迭代,CNNs的定位准确性和可靠性会持续提升;
多模态学习:CNNs能够结合多种类型的医学影像数据(如RGB图像、深度图像、红外图像等),进一步增强定位准确性。
本研究依据世界卫生组织(WHO)审定的标准针灸经穴定位(西亚太区标准)和国家标准《经穴名称与定位》(GB/T 12346-2021),并参考经典医籍如《灵枢》《脉经》《针灸甲乙经》《铜人腧穴针灸图经》《针灸大成》,以腹部穴位为例进行了标准化定位研究。
二、腹针疗法与人工智能技术的融合
腹针疗法,由著名中医专家薄智云教授所创立,是一种通过刺激腹部特定穴位以治疗多种慢性和复杂疾病的独特疗法。该疗法凭借其安全、迅速、无痛及高效的特点,在临床教学及治疗中得到了广泛推广和应用。腹针疗法将人体的躯干和四肢映射至腹部的特定穴位,构建了一个被称为“神龟图”的腹部全息图。在这一全息图中,神阙(即肚脐)作为核心穴位,任脉被设定为纵坐标轴,而垂直于任脉的水平线则作为横坐标轴。取穴时,依据骨度折量法,以中庭至神阙为8寸、神阙至曲骨为5寸、神阙至腹侧外缘为6寸的比例进行精确测量,确保使用直尺而非目测,以获取两点间的准确水平距离,并据此比例确定治疗穴位。由于全息图的精确映射,每个穴位都对应着身体的特定部位,例如滑肉门穴对应肩部,针刺此穴能有效治疗肩周炎等肩部疾病,因此,精确取穴对于疗效至关重要。
随着人工智能技术的飞速发展,计算机视觉在多个领域展现出了巨大的应用潜力。在医疗领域,基于计算机视觉的辅助医疗系统,如CT图像的自动诊断以及中医舌象诊断系统,已经得到了广泛的研究和应用。针灸穴位定位作为针灸医师的一项关键技能,传统上依赖于医生的经验判断,这可能导致穴位定位的偏差,进而影响治疗效果。
为提升穴位定位的精确性,本研究提出了一种基于卷积神经网络(CNNs)的腹部穴位定位方法。该方法利用计算机视觉技术,在图像中实现对腹部穴位的精确定位,为中医远程教学、辅助诊断治疗、针灸教学标准化以及针灸自动化治疗的发展提供了坚实的技术支撑。
穴位检测仪在腹针穴位定位中的应用具有以下优点:
腹部区域易于采集:腹部面积较大,便于使用摄像头进行图像采集,且采集后的图像分辨率较高,适合利用人工智能技术进行后续处理。
个体差异较小:腹部相对于其他身体部位生理差异较小,没有明显的先天畸形,适合进行标准化处理。
穴位数量丰富:在全身360多个经穴中,腹部分布有48个经穴,其中涉及的经脉有6条,加之腹针疗法有着悠久的历史,这些特点使得腹针穴位非常适合作为标准化处理的对象。
通过穴位定位仪对传统中医腹针穴位进行精确识别与定位,是现代科技与传统医学结合的一个良好范例,对于腹针疗法的实际应用具有重要意义。
三、基于人工智能深度学习的腹针穴位辅助定位系统设计及算法框架
本文将详细介绍基于人工智能深度学习的腹针穴位辅助定位系统(以下简称“腹针系统”)的设计和算法框架。系统设计部分将概述系统的架构和操作流程,而算法框架部分将深入探讨系统中应用的核心算法。
3.1 系统整体架构
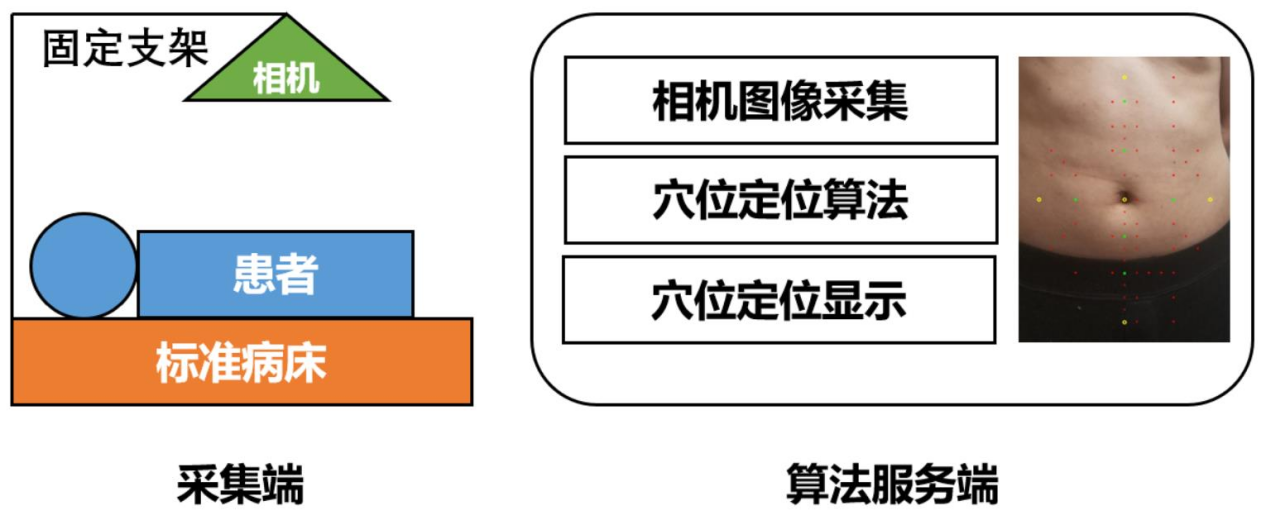
腹针系统的总体架构由两个主要部分组成:数据采集端和算法服务端。数据采集端负责获取腹部图像,通常由一个经过校准的相机系统构成;算法服务端与采集相机相连,负责处理图像采集、执行穴位定位算法以及显示定位结果。
具体来说,数据采集端通过高精度相机捕获腹部图像,确保图像的质量和精确度满足后续处理的需求。这些图像随后被传输到算法服务端,后者装备有先进的深度学习算法,用于识别和定位腹部的特定穴位。算法服务端不仅执行计算任务,还负责将定位结果以直观的方式呈现给用户,从而辅助临床决策和治疗过程。这种端到端的设计确保了系统的高效性和用户友好性,同时为腹针疗法的精确实施提供了强有力的技术支持。
3.2 算法框架
腹针穴位辅助定位系统的算法框架主要由三个核心模块构成:多任务卷积神经网络(MT-CNN)、特征点定位、图像坐标对齐以及穴位模板叠加。

多任务卷积神经网络(MT-CNN):这一模块负责从腹部图像中提取关键特征,并识别出潜在的穴位位置。MT-CNN通过同时处理多个相关任务来优化网络结构,提高穴位识别的准确性。
特征点定位:在MT-CNN识别出潜在穴位后,特征点定位模块进一步精确确定这些穴位的坐标。这一步骤确保了穴位位置的精确度,为后续的图像坐标对齐和穴位模板叠加打下基础。
图像坐标对齐:该模块负责将识别出的穴位坐标与标准穴位模板进行对齐,确保穴位位置的标准化和一致性。这一步骤对于实现跨个体的穴位定位至关重要。
穴位模板叠加:最后,穴位模板叠加模块将标准化的穴位模板叠加到原始图像上,直观显示穴位的精确位置。这不仅有助于医生进行准确的针灸操作,也为教学和远程指导提供了便利。
整个算法框架的设计旨在通过深度学习和计算机视觉技术,实现腹针穴位的快速、准确定位,从而提高针灸治疗的效率和效果。
3.2.1 多任务卷积神经网络在腹部穴位定位中的应用
人体姿态估计是计算机视觉领域中的一项基础且至关重要的任务,它在行为识别、步态分析、人物追踪等多个研究方向中发挥着核心作用,并已广泛应用于医疗监护、智能监控、人机交互等多个领域。然而,由于人体姿态的多样性和复杂性,以及衣着、视角变化、环境因素等的影响,准确检测人体关键点成为了一项极具挑战性的任务。
鉴于穴位数量众多且分布广泛,直接检测所有穴位并不现实。因此,我们选择了检测几个关键的腹部穴位作为特征点,并通过透视投影变换来确定其他穴位的位置。与人体关键点检测不同的是,腹部穴位主要分布在胸腹部皮肤上,其中仅神阙穴具有显著特征。因此,可以直接检测神阙穴,并利用人体边界信息来推断其他穴位的位置。
为实现这一目标,我们采用了多任务卷积神经网络(CNNS),该网络由CNNS主干网络和两个分支网络组成。其中一个分支网络负责回归腹部图像中神阙穴位的坐标值,而另一个分支网络则输出人体边界的分割结果。在CNNS主干网络方面,我们采用多尺度的高分辨率网络。它通过全新的高分辨率特征金字塔模块生成高分辨率热图,从而能够更好地保留原始图像中的特征信息,进而提升穴位的定位精度。与传统的图像特征金字塔结构相比,它直接从1/4分辨率开始处理,相比传统的特征金字塔算法处理的分辨率更高。神阙关键点回归网络分支的主要功能是输出神阙穴位的回归坐标,而人体边界点分割网络分支则输出一个3×H×W的特征图,其中H和W分别为原始图片的高度和宽度。该特征图中的背景点对应输出为0,左侧人体边界上的点对应输出为1,右侧人体边界上的点对应输出为2。
3.2.2 特征点定位与图像对齐
特征点定位的核心在于确定四个控制点,以便进行图像对齐并求解透视投影变换矩阵。在采集图像时,受试者保持直立或平躺姿态,以确保身体无明显扭曲变形。具体步骤如下:首先,根据神阙穴横坐标直线与人体左右边界的交点来计算出四个特征点,即神阙、上脘、曲骨以及两侧的大横穴。然后,依据神阙穴与其他特征点之间的相对距离关系来推导出其他穴位的坐标。这种方法不仅提高了穴位定位的准确性,还为实现腹部穴位的自动化检测提供了有力的技术支持。
3.2.3 图像坐标校准与穴位模板叠加
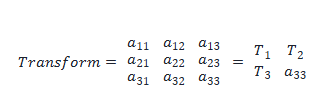
在特征点定位模块中,我们已经获得了上脘、曲骨、左侧大横和右侧大横的坐标值。利用这四个特征穴位坐标作为输入,结合穴位模板坐标的标准值,我们可以联合求解透视变换矩阵,该矩阵将图像坐标系下的所有点映射至标准空间,并与预定义的标准穴位模板坐标相对应。透视变换公式描述了图像从原始平面到标准模板平面的投射关系。
透视变换的本质是将图像投射到一个新的视平面(穴位标准模板),其通用的变换公式为:

其中(u,v)为原始图像像素坐标,w是归一化参数,它通常用于将透视变换后的坐标归一化,使其变为实际坐标值,在二维穴位坐标变换中,w为1。(x=x'/w',y=y'/w')为变换之后新的视平面像素坐标。透视变换矩阵图解如下:
其中 部分矩阵表示图像的线性变换。
部分矩阵表示图像的线性变换。 部分矩阵用于产生图像的透视变换。
部分矩阵用于产生图像的透视变换。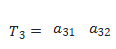 部分矩阵表示图像的平移。以上这几种平面变换统称仿射变换(affine transformation),可以理解为透视变换的特殊形式。可以使用透视变换的数学表达式为:
部分矩阵表示图像的平移。以上这几种平面变换统称仿射变换(affine transformation),可以理解为透视变换的特殊形式。可以使用透视变换的数学表达式为:
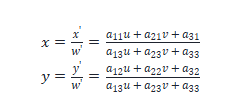
以前文给定的透视变换所对应的四个穴位坐标作为特征点,即可求得透视变换矩阵;反之,如果给定透视变换矩阵,也可以对原始图像中的所有穴位坐标进行透视变换,将其映射到穴位标准模板空间。因此,在获得特征点后,使用透视变换将图像中的点映射到标准空间中,并与标准穴位模板进行对齐。这样可以确保每个穴位都准确地对应到其标准位置。通过这种方式,实现了自动化和精确的穴位定位。
四、实验设计与结果分析
4.1 实验设计
本实验旨在通过PyTorch框架构建并训练多任务卷积神经网络(MT-CNN),并利用OpenCV库实现图像的透视变换。实验的硬件平台选用了配备RTX3060图形处理器(GPU)的服务器,以支持深度学习算法的高效推理。图像采集则采用PointGrey品牌的工业相机。
在算法训练阶段,我们收集了500张患者腹部图像,并进行了神阙穴及身体边界的详细标注,这些标注数据被用于神经网络的训练。下图展示了标注结果,其中神阙穴的标注点用于训练神阙关键点回归网络分支,而身体边界标注用于训练人体边界分割分支。

注:其中红色边界为人体边界,黄色标注点为神阙穴,绿色点为算法计算得到的边界交点。
在算法测试阶段,为了定量评估算法的准确性,我们额外采集了40张患者腹部图像,并在下图并进行了标注,这些图像作为算法评测的基准。

注:蓝色方框代表专业医生标注穴位,圆形代表算法定位穴位。若算法定位点落在对应方形区域内,则表示定位正确,如绿色圆形所示;若定位点落在对应方形区域外,则表示定位错误,如红色圆形所示。
每张图像由专业中医医生标注6个穴位,包括中脘、下脘、气海、关元、左侧天枢和右侧天枢。参与标注的医生需持有中医或针灸相关的专业资格认证和针灸师执业证书,特别是在针灸和穴位定位方面具有丰富的临床经验,并且需了解现代针灸研究的方法和标准。
为此,基于开源项目LabelMe开发了一套穴位标注工具,医生可以利用该工具导入患者腹部图像,并标注具体的穴位点。两位专业医生参与了标注工作,第一位医生完成标注后,第二位上级医师对标注的穴位进行质量控制,通过复查和验证确保标注的准确性。对于存在争议的穴位,多位专家将共同标注,并达成共识以确定最终的穴位位置。
在进行穴位标注前,必须获得患者的知情同意,并在标注过程中保护患者隐私,避免拍摄或记录不必要的个人信息。系统详细记录了每位医生的标注信息,包括标注时间、穴位位置、使用的技术和方法等。此外,系统还对标注的穴位进行了后续的跟踪研究,评估其在针灸治疗中的效果,并通过比较专业医生标注的穴位与算法定位的穴位,评价算法的准确性。
4.2 结果分析
实验结果表明,腹针穴位辅助定位系统能够有效地定位腹部穴位。为了评估系统的定位精度,我们在测试集上进行了准确率评测。测试集包含40张图像,每张图像标注了6个穴位点,共计240个测试点。系统成功定位了235个穴位点,准确率达到了97.9%。
尽管取得了高准确率,我们仍然对算法定位不准确的情况进行了深入分析,以识别潜在的改进空间。下图展示了一些算法定位不准确的例子,其中算法预测结果与实际标注结果存在偏差。经过分析,我们发现偏差的主要原因是在拍摄原始照片时,患者腹部未能正对相机,导致神阙穴位及人体边界的定位不准确,进而影响了穴位点的投影精度。
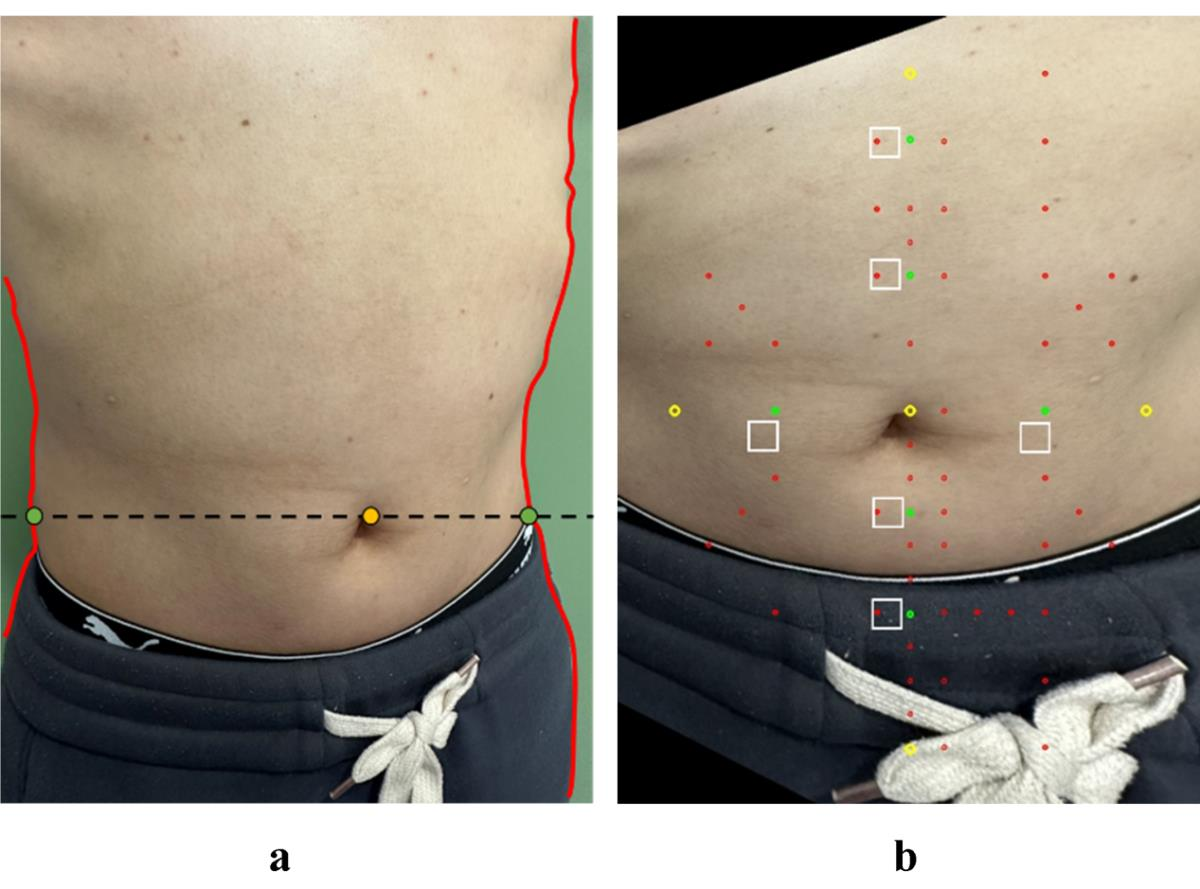
注:图a展示了算法在原始图像上的检测结果,其中红线代表检测出的人体边界,黄色点为检测得到的神阙穴,绿色点为检测出的人体边界点。图b显示了腹部穴位映射的结果,方框表示标注人员标注的穴位真实位置。黄色点为算法检测到的穴位位置。红色点为所有其他穴位的映射结果。绿色点为精度评测采用的穴位点。
针对这些问题,我们计划从以下几个方面对算法进行改进:
图像采集优化:在拍摄过程中引入固定支架和提示机制,确保采集的图像是正对相机的腹部图像,以减少误差。
3D模型考虑:由于人体是一个3D模型,而当前算法将3D点的检测问题简化为2D平面处理,这在拍摄视角不佳时会影响检测精度。未来可以考虑引入3D人脸检测的相关技术,将算法升级为3D特征点检测,以提高算法的精度和鲁棒性。
通过这些改进措施,我们期望能够进一步提升腹针穴位辅助定位系统的准确性和稳定性,为临床应用提供更加可靠的技术支持。
五、总结
本文介绍了一种基于人工智能深度学习的腹针穴位辅助定位系统。该系统采用多任务卷积神经网络(MT-CNN)算法,实现了腹部穴位的精确定位。在系统的具体实现中,一个分支网络专门用于回归腹部图像中的神阙穴位坐标,利用其明显的识别特征和对人体边界信息的依赖性,推断其他重要但特征不明显的穴位位置。另一个分支网络则负责人体边界的分割,提供全面的空间布局信息。模型成功定位了神阙穴及人体边界,并进一步推导出上脘、曲骨及双侧大横等4个关键穴位特征点。通过计算仿射变换矩阵,实现了从图像空间坐标到穴位模板空间的精确映射,从而达到腹部穴位精准定位的目的。
经过大量样本数据的训练和验证,网络能够准确地从不同角度和体态下拍摄的图像中识别并定位穴位,有效解决了传统方法在复杂环境下的局限性。这项技术利用计算机视觉的高级算法,在图像中实现穴位的精确定位,有效克服了传统人工经验定位的不准确性和直尺测量的复杂性。这为中医远程教育、辅助诊断治疗及智能针灸机器人等创新中医设备的研发提供了坚实的技术基础,为中医诊疗手段现代化提供了技术支持,有助于推动中医诊断与治疗向智能化方向发展。同时,该模型同样有望应用于头面部穴位、手部穴位等其他位置穴位的精确识别。
未来的工作将继续优化网络模型,探索更多适用于中医实际应用场景的改进策略,以期实现更加精准、便捷的自动穴位定位系统。然而,我们也认识到穴位在临床上并非简单的点状结构,而是可能表现为一个区域或立体构造,其确切位置难以仅通过体表定位来确定。因此,尽管人工智能目前能够学习到穴位定位的近似最优解,但要达到完全精确的定位仍需要时间。这一局限性提示了未来研究的方向,即结合临床实践和技术进步,并通过中医专业人员与技术人员的持续合作与训练,以逐步提高穴位定位的准确性。
CNNS技术在腹部穴位定位中的应用,不仅能够提高定位的精确性和稳定性,还能够适应不同的临床环境和患者条件,为中医针灸治疗提供强有力的技术支持。随着技术的不断进步和临床数据的积累,未来CNNS在中医穴位定位领域的应用将更加广泛和深入。
版权归原作者 武汉唯众智创 所有, 如有侵权,请联系我们删除。